太陽電池方陣自動全追蹤系統設計
2010-05-11 02:48:38汪臨偉
制造業自動化 2010年15期
汪臨偉
(九江職業技術學院,九江 332007)
太陽電池方陣自動全追蹤系統設計
汪臨偉
(九江職業技術學院,九江 332007)
0 引言
在我國太陽能和可再生能源技術已列入國家科技攻關計劃,光伏產業發展很快,但光伏設備的研發及制造、光伏科學理論的研究還落后發達國家很多。現在大量使用的太陽電池方陣都是受光面傾斜,傾角固定。而我們知道太陽能存在密度低、間歇性、光照方向和強度隨時間不斷變化,從地球上看,太陽在一天之內從東到西環繞地球,任何時刻太陽光的輻照度都是:I=I0cos,這里I0為垂直受光面的太陽輻照度的最大值,而 為太陽方向與受光面法線間的夾角。這種太陽電池方陣接受太陽能在一天中總輻照量就會少很多。筆者經過潛心研究,認為如果采用太陽電池方陣全追蹤系統使 為零或接近零,則相同面積的太陽電池方陣接受的總輻照量將會大大增加,光伏發電系統的發電量將會提高35%左右[1]。
本系統采用智能芯片自動檢測太陽光的方向,調整太陽電池方陣的朝向,實現全追蹤,使其接受太陽輻照量最大,有效提高太陽能的利用率。
1 自動追蹤的檢測
自動追蹤的檢測是太陽電池板全追蹤系統的控制核心,是系統研究工作的重點。檢測太陽光光強的方法有定時法、坐標法、太陽能電池板光強比較法和光敏電阻光強比較法[4]等等。定時法電路簡單,但系統的控制精度較差;坐標法控制精度較高,但控制電路復雜;光強比較法使系統的太陽能利用率不能達到最佳;光敏電阻光強比較法電路實現最簡單,對太陽能的利用率最大。設計采用的是光敏電阻光強比較法,是利用光敏電阻在不同光照時阻值不同的原理,來實現太陽電池板全追蹤。它采用球型光敏探測頭,豎直固定在太陽電池方陣上,在球型光敏探測頭東、西、南、北、頂部各開一圓孔,安裝聚光鏡會聚光線,內部安裝接收東、西、南、北方向光線的光敏電阻陣列(光敏電阻并聯),頂部光敏電阻陣列為誤差探測電路。
當太陽光線不是垂直照射太陽電池方陣時,球型光敏探測頭的東、西、南、北方向一定有至少一面接收到會聚的太陽光線,由于光敏電阻在光照時阻值會發生較大的變化,我們用智能芯片檢測出接收光線的那一面,驅動液壓執行機構,使太陽電池方陣正對太陽(粗調)。
粗調完成后,會聚的太陽光線一定會落在頂部誤差探測的光敏電阻陣列上,頂部誤差探測的光敏電阻陣列如圖1所示。

圖1 誤差探測光敏電阻陣列
誤差信號是如何檢測的呢?A、B、C、D為中心區光敏二極管,E、F、G、H為輔助光敏二極管,其中E、F為一對,G、H為一對,誤差檢測電路如圖2所示。
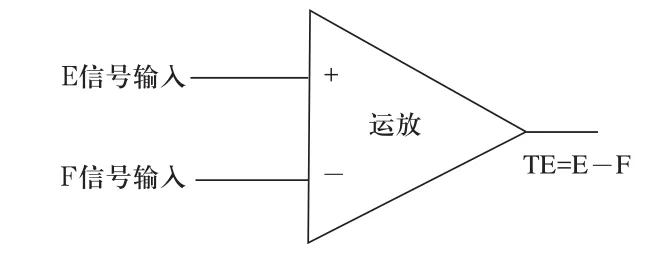
圖2 誤差檢測電路
當太陽會聚光線偏離中心區時E、F或G、H兩對輔助光敏二極管的受光量一定不一致,經誤差檢測電路檢測產生伺服電信號TE=E-F(或G-H)就可知太陽電池方陣偏離的方向,驅動執行機構進行調整(細調)。
當太陽會聚光線在中心區時,光束投射到中間的4只光敏二極管上,轉換成的電信號經運算后,產生誤差信號FE=(A+C)-(B+D),驅動執行機構進行調整(精細調整)。
當東、西、南、北方向的光敏電阻陣列、A、B、C、D中心區光敏二極管,E、F、G、H輔助光敏二極管全部檢測出無較強光線時,應該是黑夜或陰雨天,此時太陽電池方陣不跟蹤;當東、西、南、北方向的光敏電阻陣列檢測出無較強光線,E、F、G、H輔助光敏二極管、A、B、C、D中心區光敏二極管檢測出有較強光線但誤差接近為零時,實現全追蹤。
2 自動追蹤的系統設計
太陽電池方陣自動全追蹤系統是由太陽電池方陣、球型光敏探測頭、AVR單片機、驅動電路、電磁閥、液壓執行機構、電源電路組成,如圖3所示。
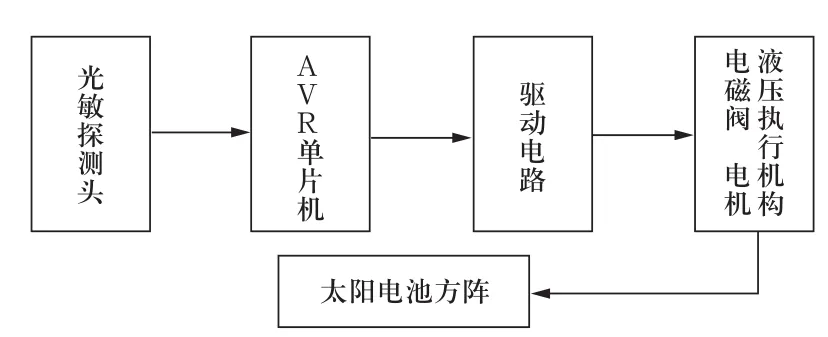
圖3 太陽電池方陣自動全追蹤系統
光敏探測頭探測太陽的位置,AVR單片機設置極限值(暗夜、陰雨光線很弱時太陽電池方陣不追蹤),當光線達到一定值時檢測東、西、南、北方向的光敏電阻陣列,阻值小的說明被太陽光照射到,初步確定太陽的位置,AVR單片機進行數字處理后驅動相應電路與執行機構調整太陽電池方陣的朝向(注意設置運動極限值:限位裝置具有東、西、南、北四個方位的極限限位功能。采用雙重限位控制結構,即控制信號限位和機械限位,保證了設備可靠地工作。),使光敏探測頭頂部A、B、C、D中心區光敏二極管和E、F、G、H輔助光敏二極管受光,AVR單片機再檢測EF、G-H的誤差電壓,細調太陽電池方陣的朝向,再檢測FE=(A+C)-(B+D)誤差信號,對太陽電池方陣的朝向進行精細調整。將AVR單片機進行設置,精細調整一次后下次對太陽電池方陣進行調整需有一定的時間間隔,避免電磁閥、電機、液壓執行機構等頻繁啟動,損耗電能。AVR單片機通過驅動電路控制液壓泵的起動、停止,使液壓系統帶動太陽電池方陣始終朝向太陽,本系統之所以采用液壓系統而不采用其他控制系統的主要原因是:液壓系統功率——重量比大。在同樣功率的控制系統中,液壓系統體積小,重量輕。這是因為對機電元件,例如電動機來說,由于受到激磁性材料飽和作用的限制,單位重量的設備所能輸出的功率比較小。液壓系統可以通過提高系統的壓力來提高輸出功率,這時只受到機械強度和密封技術的限制。在典型的情況下,發電機和電動機的功率——重量比僅為16.8W/N,而液壓泵和液壓馬達的功率——重量比為168W/N,是機電元件的10倍。在航空、航天技術領域應用的液壓馬達是675W/N。
3 AVR單片機及控制流程
圖4為AVR單片機控制流程。
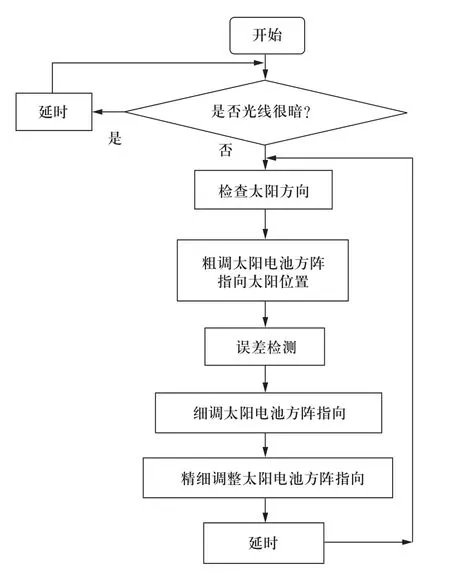
圖4 AVR單片機控制流程
4 結束語
本文介紹了太陽電池方陣自動全追蹤系統,能使太陽電池方陣自動保持與太陽光垂直,該系統全追蹤準確性高、可靠性強,能有效地提高太陽能的利用率和光伏發電系統的效率。單軸太陽能追蹤系統比固定式系統能增加25% 的功率輸出,而太陽能全追蹤系統比固定式系統能增加4l% 的功率輸出。符合環保、節能社會發展的需要,具有良好的經濟效益與社會效益,具有研究意義和推廣價值。
[1]薛建國.基于hym8563和單片機的低功耗太陽電池自動跟蹤系統設計[J].沈陽工程學院學報(自然科學版),2005(2):113-116.
[2]salah abdallah. two axes sun-tracking system with plc control[J]. energy conversion and management, 2004,45:1931-1939.
[3]王雪文.太陽能電池板自動跟蹤控制系統設計[J].西北大學學報(自然科學版),2004,34(2):163-164
[4]zhang bo-quan, yang yi-min. status and trend of wind &photovoltaic power development [j]. electric power, 2006,39(6):65-69.
The design of solar cell phalanx with all the tracking system automatically
WANG Lin-wei
太陽能光伏技術的應用在各國已成為竟相開發的綠色能源,在我國太陽電池方陣安裝多采用固定朝向,而太陽能存在密度低、間歇性、光照方向和強度隨時間不斷變化的特點,為提高太陽能的利用率,筆者設計了一種太陽電池方陣全追蹤系統,使太陽電池方陣始終正對著太陽。
球型光敏探測頭;太陽電池方陣;全追蹤;AVR單片機;液壓執行機構
汪臨偉(1969-)男,副教授,主要研究方向為電氣自動控制。
TP391
B
1009-0134(2010)12(下)-0149-04
10.3969/j.issn.1009-0134.2010.12(下).54
2010-10-21
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
