無砟軌道基樁控制網(wǎng)的一類設(shè)計(jì)
2010-05-17 08:07:00付仁俊曹伶俐岑敏儀
鐵道勘察 2010年3期
關(guān)鍵詞:測(cè)量
付仁俊 曹伶俐 岑敏儀
(1.中交第二航務(wù)工程勘察設(shè)計(jì)院, 湖北武漢 430071;2.鄂東職業(yè)技術(shù)學(xué)院, 湖北黃岡 438000;3.西南交通大學(xué), 四川成都 610031)
無砟軌道平面控制網(wǎng)分三級(jí)布設(shè),首級(jí)GPS基礎(chǔ)平面控制網(wǎng)(CPⅠ)、二級(jí)GPS線路控制網(wǎng)(CPⅡ)、三級(jí)基樁控制網(wǎng)(CPⅢ)[1]。基樁控制網(wǎng)CPⅢ主要在無砟軌道鋪軌階段布設(shè),為無砟軌道的鋪設(shè)和運(yùn)營(yíng)維護(hù)提供控制基準(zhǔn)。提高基樁控制網(wǎng)的精度對(duì)于提高無砟軌道的平順性具有非常重要的意義。按目前《客運(yùn)專線無砟軌道鐵路工程測(cè)量暫行規(guī)定》要求,基樁控制網(wǎng)按五等導(dǎo)線的精度要求布設(shè),導(dǎo)線兩端附合到CPⅠ和CPⅡ控制網(wǎng)上。若考慮控制網(wǎng)原始數(shù)據(jù)誤差對(duì)控制點(diǎn)點(diǎn)位精度的影響,那么影響基樁控制網(wǎng)點(diǎn)位精度的因素主要有以下幾方面:(1)導(dǎo)線網(wǎng)的網(wǎng)形;(2)導(dǎo)線測(cè)量的精度;(3)控制點(diǎn)原始數(shù)據(jù)誤差的影響。本文針對(duì)基樁控制網(wǎng)導(dǎo)線的三種不同附合方式進(jìn)行驗(yàn)算比較,探討原始數(shù)據(jù)誤差對(duì)基樁控制網(wǎng)點(diǎn)位精度的影響。
1 軌道平順性與基樁控制網(wǎng)CPⅢ的關(guān)系
軌道的方向性可表述為在線路中線上任意選取(或測(cè)量)3個(gè)中線點(diǎn),組成的角度值與線路設(shè)計(jì)值之差要滿足設(shè)計(jì)要求,因此可將軌道橫向平順性的要求轉(zhuǎn)化為3個(gè)基樁控制點(diǎn)的角度中誤差要求。如圖1,k、j、h為3個(gè)相鄰的基樁控制點(diǎn),為了便于表述,定義∠kjh為β,∠jkh為α,mβ,mα分別為β,α的角度測(cè)量中誤差。參考《客運(yùn)專線無砟軌道鐵路工程測(cè)量暫行規(guī)定》,以mβ≤6″,mα≤4″作為軌道平順性的主要指標(biāo)。

圖1 相鄰CPⅢ組成角度示意
2 數(shù)據(jù)處理方法
CPⅠ、CPⅡ和CPⅢ的測(cè)量數(shù)據(jù)采用間接平差方法處理,下面給出顧及原始數(shù)據(jù)誤差影響的精度評(píng)定方法。在得到各級(jí)控制網(wǎng)點(diǎn)位坐標(biāo)協(xié)方差陣之后,由CPⅢ點(diǎn)位坐標(biāo)協(xié)方差陣,推導(dǎo)出相鄰CPⅢ控制點(diǎn)的角度中誤差。
2.1 CPⅠ和CPⅡ的測(cè)量及數(shù)據(jù)處理
(1)首級(jí)GPS網(wǎng)CPⅠ的數(shù)據(jù)處理采用間接平差,由于差分GPS觀測(cè)的是3維坐標(biāo)向量,可采用的方法是把GPS三維基線矢量化為二維平面坐標(biāo)差,或者轉(zhuǎn)化為邊長(zhǎng)和方位角觀測(cè)量,由此列出各基線的誤差方程式,解算出CPⅠ點(diǎn)位坐標(biāo)協(xié)方差陣[5]。
(2)次級(jí)GPS網(wǎng)CPⅡ是以CPⅠ為基礎(chǔ)建立的,其點(diǎn)位誤差受CPⅠ點(diǎn)位誤差的影響,在數(shù)據(jù)處理時(shí)必須考慮由CPⅠ帶入的原始數(shù)據(jù)誤差。路伯祥等人[6]按以下方法處理:
設(shè)有如下點(diǎn)位坐標(biāo)的函數(shù)式
(1)
(1)式中
m=tⅡ+tⅠ;tⅡ?yàn)镃PⅡ網(wǎng)點(diǎn)位坐標(biāo)未知個(gè)數(shù),tⅠ為CPⅠ點(diǎn)位坐標(biāo)未知數(shù)。
則CPⅠ和CPⅡ的測(cè)量誤差對(duì)函數(shù)F的影響值分別為
(2)
(3)

(4)
(5)
(6)
2.2 CPⅢ的數(shù)據(jù)處理
CPⅢ完整的點(diǎn)位坐標(biāo)協(xié)方差陣需考慮CPⅠ、CPⅡ點(diǎn)位誤差對(duì)CPⅢ控制點(diǎn)坐標(biāo)協(xié)方差陣的影響。
(7)

則CPⅢ的測(cè)量誤差對(duì)函數(shù)F3的影響值為
(8)
CPⅠ和CPⅡ的誤差對(duì)函數(shù)F3的影響值為
(9)

2.3 解算α和β的角度中誤差
如圖1,h、j、k為三個(gè)基樁控制點(diǎn),αjk和αjh為邊jk和jh的坐標(biāo)方位角,則
∠hjk=α=αjk-αjh
(10)
對(duì)(10)式求微分,可得α和β的權(quán)函數(shù)式dα以及dβ,用矩陣表示如下
(11)

則角度α和β的方差陣為
(12)
(12)式中的D3為CPⅢ點(diǎn)位坐標(biāo)協(xié)方差陣。
3 仿真試驗(yàn)及理論分析
3.1 仿真試驗(yàn)
《客運(yùn)專線無砟軌道鐵路工程測(cè)量技術(shù)暫行規(guī)定》要求無砟軌道控制網(wǎng)分三級(jí)布設(shè),基樁控制網(wǎng)(CPⅢ)按附合導(dǎo)線連接到CPⅠ或者CPⅡ上。筆者以一個(gè)1 005 km長(zhǎng)的控制網(wǎng)為例設(shè)計(jì)了三種仿真試驗(yàn)方案。試驗(yàn)控制網(wǎng)全長(zhǎng)1 005 km,首級(jí)平面控制網(wǎng)CPⅠ采用GPS觀測(cè),點(diǎn)間隔5 km;二級(jí)線路控制網(wǎng)CPⅡ采用GPS觀測(cè),點(diǎn)間隔1 km;基樁控制網(wǎng)CPⅢ采用附合導(dǎo)線,點(diǎn)間隔200 m,GPS網(wǎng)線狀布設(shè)。
方案1:在布設(shè)CPⅢ時(shí),附合導(dǎo)線兩端同時(shí)跟CPⅠ和CPⅡ控制點(diǎn)相連。
方案2:在布設(shè)CPⅢ時(shí),附合導(dǎo)線兩端只跟CPⅡ控制點(diǎn)相連。
方案3:在布設(shè)CPⅢ時(shí),附合導(dǎo)線兩端只跟CPⅠ控制點(diǎn)相連。
由于CPⅠ點(diǎn)間距離為5 km,若布設(shè)5 km長(zhǎng)的CPⅢ附合導(dǎo)線,CPⅢ控制網(wǎng)的可靠性勢(shì)必很低,故方案3是在不考慮導(dǎo)線觀測(cè)可靠性的前提下進(jìn)行。為了便于數(shù)據(jù)統(tǒng)計(jì),分別在控制網(wǎng)起始端、中部和結(jié)束端選取部分CPⅢ附合導(dǎo)線作為試驗(yàn)數(shù)據(jù)。圖2、圖3、圖4分別為方案1、方案2、方案3在控制網(wǎng)起始端選取的CPⅢ附合導(dǎo)線示意。
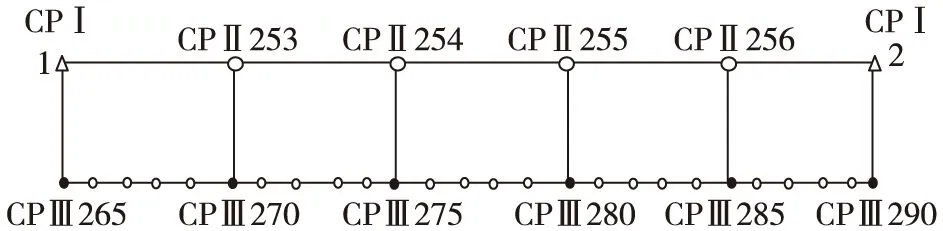
圖2 方案1基樁控制網(wǎng)導(dǎo)線附合方式
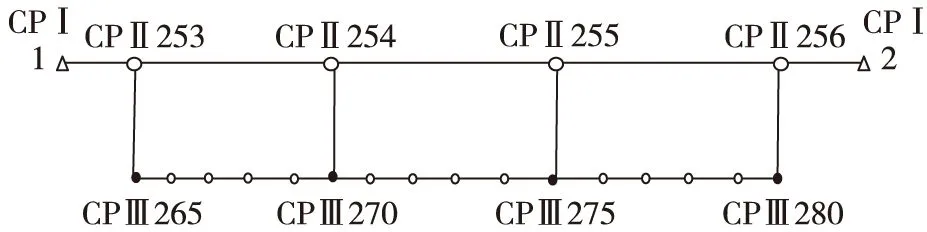
圖3 方案2基樁控制網(wǎng)導(dǎo)線附合方式
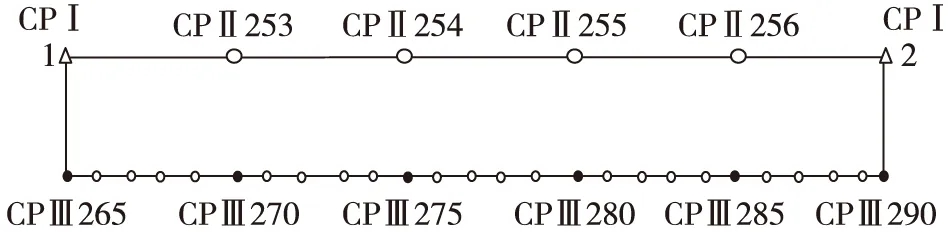
圖4 方案3基樁控制網(wǎng)導(dǎo)線附合方式
《客運(yùn)專線無砟軌道鐵路工程測(cè)量技術(shù)暫行規(guī)定》對(duì)CPⅠ和CPⅡ驗(yàn)后精度的要求:CPⅠ控制網(wǎng)的驗(yàn)后基線方向中誤差小于1.3″,邊長(zhǎng)相對(duì)中誤差小于1/170 000;CPⅡ控制網(wǎng)驗(yàn)后的基線方向中誤差小于1.7″,邊長(zhǎng)相對(duì)中誤差小于1/100 000;CPⅢ附合導(dǎo)線用全站儀觀測(cè),儀器標(biāo)稱精度測(cè)角2.0″,測(cè)邊±(2+2×10-6D)mm,測(cè)角驗(yàn)前單位權(quán)中誤差4.0。取CPⅠ和CPⅡ的驗(yàn)前方向觀測(cè)中誤差作為單位權(quán)中誤差,當(dāng)CPⅠ和CPⅡ驗(yàn)前方向觀測(cè)中誤差分別取1.0″和2.0″時(shí),CPⅠ和CPⅡ控制網(wǎng)的驗(yàn)后最弱邊精度能滿足《客運(yùn)專線無砟軌道鐵路工程測(cè)量技術(shù)暫行規(guī)定》對(duì)CPⅠ和CPⅡ驗(yàn)后精度的要求。圖5和圖6分別為在該觀測(cè)精度下α、β角度中誤差示意。
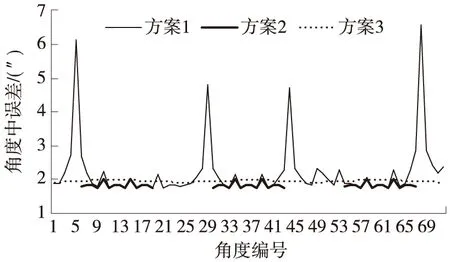
圖5 α角角度中誤差示意
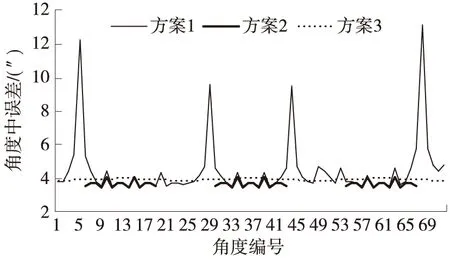
圖6 β角角度中誤差示意
圖5和圖6顯示,方案1的精度最差,遠(yuǎn)超出無砟軌道平順性精度指標(biāo),方案2和方案3的精度結(jié)果基本上一致,且能滿足軌道平順性精度指標(biāo)。
3.2 理論分析
方案1中,CPⅢ同時(shí)附合到CPⅠ和CPⅡ上,在列誤差方程時(shí)同時(shí)要考慮CPⅠ和CPⅡ控制點(diǎn)原始數(shù)據(jù)誤差的影響[7],誤差方程如下
(13)

間接平差后得到CPⅢ控制點(diǎn)坐標(biāo)改正數(shù)為
(14)
式(14)中
(15)
令
(16)
F2=-F3B2
(17)
F1=-F3B1
(18)
按協(xié)方差傳播率得
(19)
同理,方案2的CPⅢ控制網(wǎng)點(diǎn)位坐標(biāo)協(xié)方差陣為
(20)
方案3的CPⅢ控制網(wǎng)點(diǎn)位坐標(biāo)協(xié)方差陣為
(21)

合導(dǎo)線一端附合到CPⅠ而另一端附合到CPⅡ,控制點(diǎn)原始數(shù)據(jù)誤差將對(duì)導(dǎo)線測(cè)量精度會(huì)產(chǎn)生多次累加的影響,極大影響了部分CPⅢ控制點(diǎn)的點(diǎn)位精度,從而導(dǎo)致這些CPⅢ控制點(diǎn)處α和β角度中誤差超限。從圖5和圖6來看,這些超限的CPⅢ控制點(diǎn)主要位于CPⅢ附合導(dǎo)線跟CPⅠ和CPⅡ控制點(diǎn)連接處。
由此可見,在建立CPⅢ附合導(dǎo)線的時(shí)候,附合導(dǎo)線兩端只能同時(shí)附合到相同等級(jí)的控制網(wǎng)上,即附合導(dǎo)線兩端同時(shí)附合到CPⅠ控制點(diǎn)上或者同時(shí)附合到CPⅡ控制點(diǎn)上。理論上,方案3能滿足軌道平順性要求,然而在實(shí)際操作中由于CPⅠ點(diǎn)間距離過長(zhǎng),通常為5 km或者更長(zhǎng),若采用方案3進(jìn)行CPⅢ附合導(dǎo)線測(cè)量,會(huì)大大降低導(dǎo)線測(cè)量的可靠性,況且由于CPⅠ點(diǎn)間距離太長(zhǎng),超出了測(cè)量?jī)x器的可視范圍。因而在進(jìn)行CPⅢ附合導(dǎo)線測(cè)量時(shí),附合導(dǎo)線只能同時(shí)附合到CPⅡ控制點(diǎn)上。
4 結(jié)論
通過三種方案的比較,得出以下結(jié)論:
利用附合導(dǎo)線建立無砟軌道基樁控制網(wǎng)時(shí),附合導(dǎo)線兩端只能同時(shí)附合到CPⅡ控制點(diǎn)上,不能將附合導(dǎo)線一端附合到CPⅡ控制點(diǎn)而將導(dǎo)線的另一端同時(shí)連測(cè)到CPⅠ控制點(diǎn)上。
現(xiàn)場(chǎng)生產(chǎn)實(shí)踐中通常鼓勵(lì)采用的方式是在建立低級(jí)別控制網(wǎng)時(shí),盡量閉合到高精度的控制點(diǎn)上。在建立無砟軌道鋪軌基樁控制網(wǎng)CPⅢ時(shí),通常認(rèn)為將CPⅢ附合到CPⅠ控制點(diǎn)上會(huì)提高CPⅢ的點(diǎn)位精度。然而考慮控制網(wǎng)原始數(shù)據(jù)誤差影響后,嚴(yán)密的精度評(píng)定說明了CPⅢ導(dǎo)線只能附合到CPⅡ控制點(diǎn)上,不能附合到CPⅠ上。這一結(jié)論對(duì)于目前我國(guó)無砟軌道的建設(shè)有重要的指導(dǎo)意義。
[1] 鐵道第二勘察設(shè)計(jì)院.客運(yùn)專線無砟軌道鐵路工程測(cè)量技術(shù)暫行規(guī)定[S].北京:中國(guó)鐵道出版社,2006
[2] MILEV Ivo and GRUENDIG Lothar,Germany. High Speed Rail Alignment and Maintenance-Data Modelling, Data Acquisition and Analysis[J].FIG XXⅡ International Congress,Washington, D.C.USA, April 19-26 2002
[3] 武漢大學(xué)測(cè)繪學(xué)院測(cè)量平差學(xué)科組.誤差理論與測(cè)量平差基礎(chǔ)[M].武漢:武漢大學(xué)出版社,2003
[4] MILEV Ivo and GRUENDIG Lothar, Germany Rail Track Data Base of German Rail-the Future of Automated Maintenance[J]. INGEO 2004 and FIG Regional Central and Eastern European Conference on Engineering Surveying Bratislava,Slovakia, November 11-13, 2004.
[5] 姚連璧,沈云中,胡叢瑋,等.鐵路隧道GPS網(wǎng)布設(shè)的精度分析[J].武漢測(cè)繪科技大學(xué)學(xué)報(bào),1997(6):180
[6] 路伯祥,陶國(guó)冶.隧道導(dǎo)線網(wǎng)測(cè)量誤差對(duì)貫通誤差影響值的嚴(yán)密估算方法[J].鐵道學(xué)報(bào),1989(2):60-63
[7] 劉成龍.方向前方交會(huì)嚴(yán)密精度評(píng)定方法的研究[J].四川測(cè)繪,1995(18):32-33
[8] Lu Baixiang, Cen Minyi. A problem in the application of the error ellipsoid[J]. Sueveyreview, 1993(5):239-243
[9] 顧利亞,岑敏儀.施工控制網(wǎng)的優(yōu)化設(shè)計(jì)[J].西南交通大學(xué)學(xué)報(bào),1997,32(2):160-164
[10] 盧建康,任自珍,岑敏儀.客運(yùn)專線無砟軌道施工平面控制網(wǎng)優(yōu)化設(shè)計(jì)[J].鐵道工程學(xué)報(bào),2007(8):49-52
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00