永磁同步直線電機(jī)(PMSLM)的模糊PID控制技術(shù)
2010-05-26 03:24:40劉向東劉文清
世界制造技術(shù)與裝備市場 2010年5期
劉向東 劉文清
永磁同步直線電機(jī)(PMSLM)的模糊PID控制技術(shù)
PID fuzzy control technology for PMSLM
劉向東 劉文清
針對所研究的PMSLM,在原PID控制的基礎(chǔ)上設(shè)計(jì)了一套能夠在線修改PID參數(shù)的模糊自適應(yīng)控制系統(tǒng)。為適應(yīng)實(shí)際系統(tǒng)的高速度和高精度要求,專門設(shè)計(jì)了簡化模糊推理機(jī),以提高系統(tǒng)的實(shí)時性。文中介紹了模糊自適應(yīng)PID控制系統(tǒng)的原理與設(shè)計(jì)方法,并且進(jìn)行了仿真研究,仿真結(jié)果及實(shí)驗(yàn)表明該系統(tǒng)跟蹤效果好,抗干擾能力強(qiáng),具有實(shí)際應(yīng)用價值。
模糊PID;PID;直線電機(jī)
1 引言
PID控制技術(shù)是控制系統(tǒng)中比較成熟的控制技術(shù),PID控制器結(jié)構(gòu)簡單、控制參數(shù)容易調(diào)整,不需要系統(tǒng)的確切數(shù)學(xué)模型。所以PID控制技術(shù)廣泛應(yīng)用于傳動控制系統(tǒng)中。但是在要求高速、高精以及擾動比較大的控制系統(tǒng)中,要求系統(tǒng)的調(diào)節(jié)量大,速度快,固定參數(shù)的PID控制已經(jīng)遠(yuǎn)遠(yuǎn)無法滿足系統(tǒng)的需要。
在我們所研究的PMSLM的運(yùn)行過程中,不但要求高速度、高精度和大負(fù)載,而且由于直線電機(jī)本身所產(chǎn)生的邊端效應(yīng)等,要求我們能夠在運(yùn)行過程中能夠及時改變電機(jī)的驅(qū)動輸出狀態(tài),以增強(qiáng)運(yùn)行的平穩(wěn)性和定位的準(zhǔn)確性。所以,我們需要尋求一種新的控制算法,但是算法越復(fù)雜,計(jì)算量越大,控制系統(tǒng)收斂速度越慢,從而限制了系統(tǒng)的實(shí)時性,不利于系統(tǒng)速度的提高。
模糊自適應(yīng)PID控制技術(shù)是模糊控制和PID控制技術(shù)相結(jié)合的產(chǎn)物。模糊控制器的優(yōu)點(diǎn)是不要求掌握受控對象的精確數(shù)學(xué)模型,而是根據(jù)平時的經(jīng)驗(yàn)規(guī)則借助推理來決定控制量的大小,所以計(jì)算量大大減小,同時具有較寬的調(diào)節(jié)范圍。模糊自適應(yīng)PID控制器結(jié)合了兩者的優(yōu)點(diǎn),具有模糊控制器調(diào)節(jié)速度快和PID的穩(wěn)定輸出,同時又可以保證系統(tǒng)的實(shí)時反應(yīng)速度。
2 PMSLM的控制系統(tǒng)簡介
PMSLM控制系統(tǒng)的原理圖如圖1所示,整個控制系統(tǒng)有三個控制環(huán):位置環(huán)、速度環(huán)、電流環(huán)。模糊自適應(yīng)PID技術(shù)主要應(yīng)用于速度環(huán),以保證系統(tǒng)能夠高速度和高精度的要求,同時系統(tǒng)運(yùn)行比較穩(wěn)定。

速度環(huán)的輸出作為電流環(huán)的給定,速度環(huán)的給定信號則是位置環(huán)的輸出。電流環(huán)是系統(tǒng)的直接輸出環(huán)節(jié),其控制模型采用在PMSLM系統(tǒng)中廣泛應(yīng)用的矢量控制技術(shù)。以轉(zhuǎn)子磁通這一旋轉(zhuǎn)的空間矢量為參考坐標(biāo),利用靜止坐標(biāo)系到旋轉(zhuǎn)坐標(biāo)系之間的變換,實(shí)現(xiàn)電流中的勵磁電流分量 (Id)和轉(zhuǎn)距電流分量 (Iq)的解耦,然后結(jié)合位置值計(jì)算出轉(zhuǎn)子位置角γ,就得到一個轉(zhuǎn)子磁通矢量。通過調(diào)節(jié)這一矢量,就可以實(shí)現(xiàn)對電機(jī)的控制,矢量控制原理如圖2所示。此調(diào)節(jié)環(huán)節(jié)采用PID控制得到一個穩(wěn)定輸出。
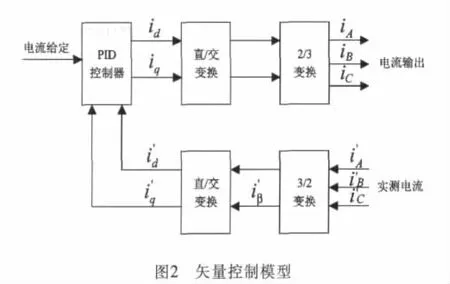
id,iq勵磁電流和轉(zhuǎn)矩電流
i′d,i′q,勵磁電流和轉(zhuǎn)矩電流的測量值
iα,iβ靜止坐標(biāo)系下的交流電流
i′α,i′β靜止坐標(biāo)系下的交流電流的測量值
iA,iB,iC三項(xiàng)輸出電流
i′A,i′B,i′C三項(xiàng)輸出的測量值
3 模糊自適應(yīng)PID控制技術(shù)
3.1 模糊自適應(yīng)PID控制技術(shù)的原理
模糊自適應(yīng)控制技術(shù)的原理如圖3所示。首先,根據(jù)系統(tǒng)輸入?yún)?shù)進(jìn)行常用狀態(tài)辨識,如果屬于常用狀態(tài)則通過開關(guān)執(zhí)行簡化模糊推理機(jī)調(diào)整PID參數(shù),否則運(yùn)行模糊推理機(jī);然后把調(diào)整的PID參數(shù)送入PID控制器;最后,PID控制器把控制量輸出給被控對象。
系統(tǒng)中設(shè)計(jì)兩個模糊推理機(jī)的原因在于:系統(tǒng)在運(yùn)行時實(shí)時性要求較高,雖然采用模糊自適應(yīng)PID控制技術(shù)程序相對簡單,但是查詢模糊規(guī)則表仍然會占用系統(tǒng)很大的時間。要實(shí)驗(yàn)過程中我們發(fā)現(xiàn),系統(tǒng)在實(shí)際運(yùn)行中,有幾種的狀態(tài)的出現(xiàn)頻率特別高,所以,我們設(shè)計(jì)簡化模糊規(guī)則庫,存儲系統(tǒng)的常用狀態(tài)。當(dāng)系統(tǒng)在穩(wěn)定運(yùn)行時,查詢簡化模糊規(guī)則庫,可以從很大程度上減少模糊推理所用時間,大大提高系統(tǒng)的實(shí)時性。
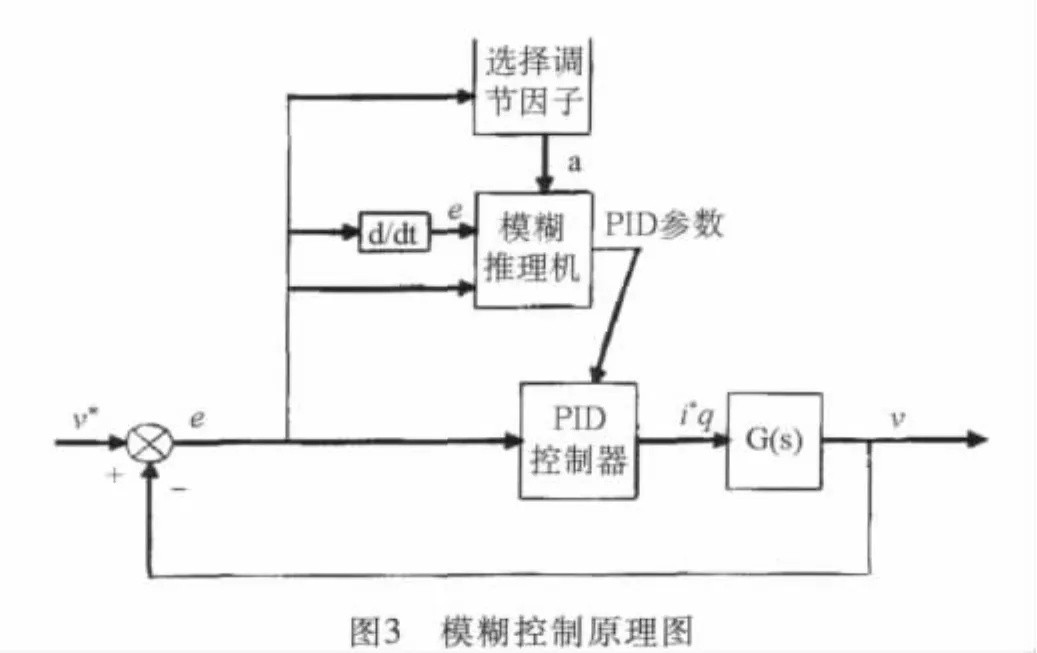
在運(yùn)行時,我們首先進(jìn)行簡單的辨識,如:IF偏差e非常小 THEN查詢簡化模糊規(guī)則表ELSE查詢模糊規(guī)則庫。這樣只要查詢到 非常小,而不需要知道變化率的值,就可以說明系統(tǒng)正在穩(wěn)定運(yùn)行,我們查詢簡化模糊規(guī)則表進(jìn)行模糊推理。
3.2 模糊自適應(yīng)PID控制系統(tǒng)的設(shè)計(jì)
根據(jù)經(jīng)驗(yàn),PID控制參數(shù)的基本控制規(guī)則為:
A.比例系數(shù)Kp的作用是減小靜差,加快系統(tǒng)的響應(yīng)速度;但是過大的Kp會導(dǎo)致系統(tǒng)動態(tài)性能變差,甚至?xí)归]環(huán)系統(tǒng)不穩(wěn)定。
B.積分系數(shù)Ki的作用是消除靜態(tài)誤差;但是積分控制有滯后特性,過大的Ki會使控制的動態(tài)性能變差,嚴(yán)重時會使系統(tǒng)不穩(wěn)定。
C.微分系數(shù)Kd的作用是能根據(jù)誤差變化趨勢作出有效控制,有助于抑制乃至消除調(diào)速系統(tǒng)的超調(diào),并能消除系統(tǒng)在負(fù)載擾動下的動態(tài)速度降落。
根據(jù)以上規(guī)律,我們設(shè)計(jì)模糊自適應(yīng)PID控制系統(tǒng)的模糊推理機(jī)。
根據(jù)以上分析和輸入輸出語言變量的設(shè)定,可以總結(jié)出Kp,Ki,Kd的自適應(yīng)控制規(guī)則,建立模糊控制規(guī)則表。模糊控制規(guī)則也可以寫成條件語句形式,例如:if E=PB and EC=PB then Kd=PM。
參數(shù)Kx(x可以表示為P,I,D)的調(diào)整值為
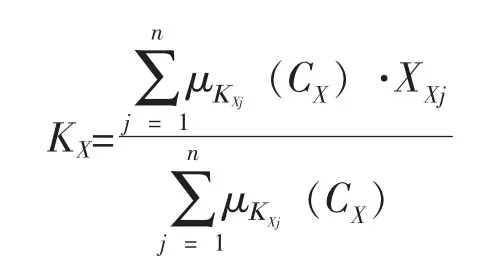
常用狀態(tài)主要設(shè)定為系統(tǒng)啟動狀態(tài)、穩(wěn)定運(yùn)行狀態(tài)和制動狀態(tài),所以簡化模糊控制規(guī)則表中把偏差變化e的語言變量改為:NB(負(fù)大),Z(零),PB(正大)。此處各變量的意義與前者完全不同,Z(零)屬于前者NZ(負(fù)零)和PZ(正零)并集,而NB(負(fù)大)和PB(正大)的定義也分別屬于前者的NB(負(fù)大)和PB(正大)。偏差變化率 和控制器的比例修正系數(shù)CP采用前者中的定義方法。
3.3 模糊自適應(yīng)PID技術(shù)的仿真
我們根據(jù)實(shí)驗(yàn)室現(xiàn)有PMLSM進(jìn)行仿真,電流環(huán)采樣周期為100,速度環(huán)的采樣周期為400,其簡化數(shù)學(xué)模型如下:

其中,τ為極距,M為動子質(zhì)量,B為粘滯摩擦系數(shù),Fe為電磁推力,F1為負(fù)載阻力,Fd為端部效應(yīng)產(chǎn)生的阻力,v為動子線速度,φf為永磁體有效磁通。
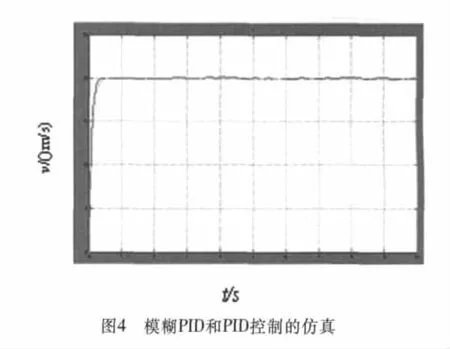
仿真結(jié)果如圖4。仿真過程中,給定信號是一階躍信號。圖中實(shí)線為模糊PID控制系統(tǒng)的跟蹤響應(yīng)曲線,虛線是常規(guī)PID控制曲線,兩曲線均能夠在0.4秒達(dá)到穩(wěn)定,在2.5s加入一最大幅值為200N的隨機(jī)干擾信號。從仿真結(jié)果可以看出,對于階躍信號,模糊PID控制比純PID控制具有更好的跟蹤性能,且無速度超調(diào);對于干擾信號,模糊PID控制比純PID控制具有更強(qiáng)的抗干擾能力。所以,模糊PID控制在直線電機(jī)控制過程中優(yōu)于常規(guī)PID。
[1] 李永東.交流電機(jī)數(shù)字控制系統(tǒng).北京:機(jī)械工業(yè)出版社,2002
[2] 郭慶鼎等.基于解耦控制的同步傳動技術(shù)的應(yīng)用研究.沈陽:控制與決策,2001
[3] 趙金等.交流調(diào)速系統(tǒng)模糊PID控制.重慶:兵工自動化,2000
[4] 諸靜.模糊控制原理與應(yīng)用.北京:機(jī)械工業(yè)出版社,1955
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數(shù)學(xué)小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
建材發(fā)展導(dǎo)向(2019年13期)2019-08-24 06:37:40
電子制作(2019年7期)2019-04-25 13:16:50
Coco薇(2017年11期)2018-01-03 20:59:57
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
暨南學(xué)報(哲學(xué)社會科學(xué)版)(2016年9期)2017-01-15 13:52:02