一種大型礦用自卸車自動稱重系統的設計
2010-06-05 10:20:00孫衛陽
船電技術 2010年8期
孫衛陽
( 湘電重型裝備股份有限公司,湘潭411101 )
過去,大型礦用自卸車裝載礦物的重量測量是靠估方或卸貨后測量的方式,由于地磅測量的范圍小,因此這些測試方法存在測量數據誤差大、耗時長等缺陷,因此一套能實時、方便地檢測大型礦用自卸車裝載礦物重量的測試系統對駕駛員和調度管理部門顯得十分必要。
盡管進口的 930E、MT4400AC和 MT5500大型礦用自卸車已裝有車載礦物自動稱重系統,但國內大型礦用自卸車車載礦物自動稱重系統研究還很少。
本文介紹了湘電重型裝備股份有限公司生產的SF33900大型礦用自卸車自動稱重系統,其適用于大噸位氮氣懸掛型車輛。該系統能實時顯示車輛的載荷、車速、坡度、時間、懸掛壓力和故障信息等功能參數;同時,系統還具有強大的數據記錄、報警和上位機數據下載、數據庫查詢、故障分析等功能,能記錄駕駛員每班、每日、每月、每季運載的次數、運載的總量、車輛超載時間等信息;系統具有 RS232、RS485及 CAN總線等通信接口,系統獲取的數據能通過這些接口與車輛信息管理等智能系統實現互聯。
1 大型礦用自卸車自動稱重系統的組成
如圖1所示,SF33900大型礦用自卸車自動稱重系統主要由主控制器、壓力傳感器、雙軸傾斜計、液晶顯示器模塊、載荷指示燈及其它輸入/輸出信號等部分組成。
其中,主控制器是自動稱重系統的核心,其具有信號輸入/輸出處理、載荷計算、運輸循環管理、數據/事件記錄及通訊等功能。主控制器利用接受到的四個壓力信號、坡度信號、部分車輛狀態信號以及設定條件,判斷分析車輛的運行工況、狀態;經過內部采樣、濾波、分析、模態仿真、非線性校正等算法,可計算出車輛的有效載重;同時,通過采集車速傳感器信號,算出負載運輸公里,并累計折算出運載的噸公里。
自動稱重系統CPU采用抗干擾能力強、集成度高、運算速度快的 DSP處理器TMS320F2812[1,2],主控制器采用鋁制機殼安裝,可提高抗電磁干擾能力。
4個壓力傳感器裝于懸掛上,每個傳感器能將測得的懸掛壓力的變化信號轉換成 4~20 mA的模擬信號,并送至主控制器。雙軸傾斜計裝于司機室內,其先將車輛行駛途中的坡度信號轉換成0~5 V電信號,然后送至主控制器。系統通過模態仿真計算,可提高在坡度時的載荷計算精確度。
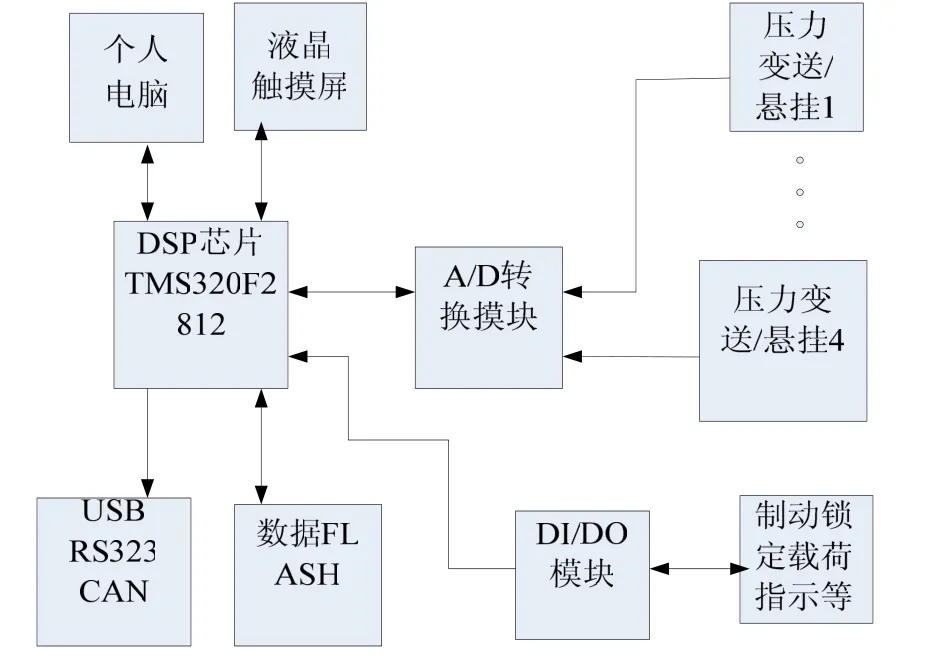
圖1 系統結構
自動稱重系統配備有1個RS232通訊接口、1個RS485接口與1個CAN接口,RS232與RS485接口采用MODBUS現場總線協議,CAN通信采用國際標準的總線通信協議,具有很好的通用性,可方便地實現與其它車輛智能系統的互聯[3,4]。主控制器表面設有液晶顯示屏和功能按鍵,通過顯示屏可以看到車輛的工作情況和有關數據;載荷指示燈裝于甲板兩側。
2 工作原理
2.1 車輛載荷的測量原理
自卸車多為油氣懸掛式自卸車,車斗由4個油氣懸掛固定安裝,車斗及貨物的重量傳遞給油氣懸掛,將引起懸掛壓力變化[5]。
SF33900大型礦用自卸車貨箱作用在四懸掛上的作用力計算公式為:

式中,F為自卸車貨箱對懸掛的作用力;P為懸掛內氮氣壓力;S是懸掛氮缸的內截面積。
本文根據測量的懸掛壓力、車輛傾斜度等數據,結合四懸掛在車架上的安裝結構尺寸,建立了車輛載荷計算模型;利用四個壓力傳感器對懸掛壓力進行了測量;并通過傾斜儀,檢測了車輛與水平面的空間夾角。其中,車輛載荷計算模型的計算公式如下示:

式中,k1、k2、k3、k4、k5為稱重系數,由車輛及其車斗、懸掛的安裝結構尺寸決定。W表示車輛載荷,單位為t;P1、P2、P3、P4分別為前左、前右、后左、后右四個油氣懸掛的壓力;P01、P02、P03、P04分別為空車時各懸掛對應的壓力,壓力單位為MPa。
2.2 自動稱重系統的重量計算流程
大型自卸車車輛循環運輸常分8個不同階段或狀態——自重測量、空車、裝載、調度、測重、運輸、卸車及卸車完畢。每個階段或狀態都需要自動稱重系統進行不同的計算和儲存不同的數據。其載荷計算及控制流程如圖2。
其中,1) 自動稱重系統在卸車10 s之后,應確認載荷已被卸掉。如果有效載重量少于額定載荷的20%,自動稱重系統將切換到自重測量,并開始計算新的空車自重;如果有效載重量未降到額定載荷的20%以下,測量器將返回到調度或運輸狀態,直至卸車系統將計數運行一次。
2) 在自重測量狀態下,當車速大于 5 km/h時,自動稱重系統采用先進的計算方法計算自卸車空車時懸掛承受重量。這個自重數值將從有效載荷的懸掛承受重量中扣除,以計算最后的有效載重量。如果檢測到有回轉載荷,自動稱重系統將從自重測量或空車狀態切換到裝車狀態。
3) 如果已施加制動鎖定,自動稱重系統將通過分析懸掛壓力以檢測回轉載荷。如果檢測到有回轉載荷,自動稱重系統將切換到裝車狀態,檢測回轉載荷的最小值為額定載荷的10%,檢測回轉載荷一般要用4 s至6 s。如果載荷增至額定載荷的50%并已達10 s還未施加制動鎖定,自動稱重系統也會切換到裝車。
4) 只要自卸車一開始移動,自動稱重系統立即從裝車切換到調度。調度區域為160 m,以便讓駕駛員把自卸車重新定位到裝載機下面。在調度區內的任何時間都可添加更多的有效載重量。自卸車一旦行走了160 m,自動稱重系統進入測重階段。在測重階段,如果移動速度超過了 5 km/h,自動稱重系統就采用先進的計算方法計算負載時懸掛承受重量。測重結束后進入運輸狀態。
5) 如果自動稱重系統收到箱斗舉升信號,自動稱重系統將從測重階段切換到卸車狀態。如果自卸車在測重階段里已運動了不到 1 min,自動稱重系統將采用精確性較低的平均法來計算最后有效載重量。當自卸車箱斗降回原位時,自動稱重系統就切換到自重測量,進入下一個運輸循環。
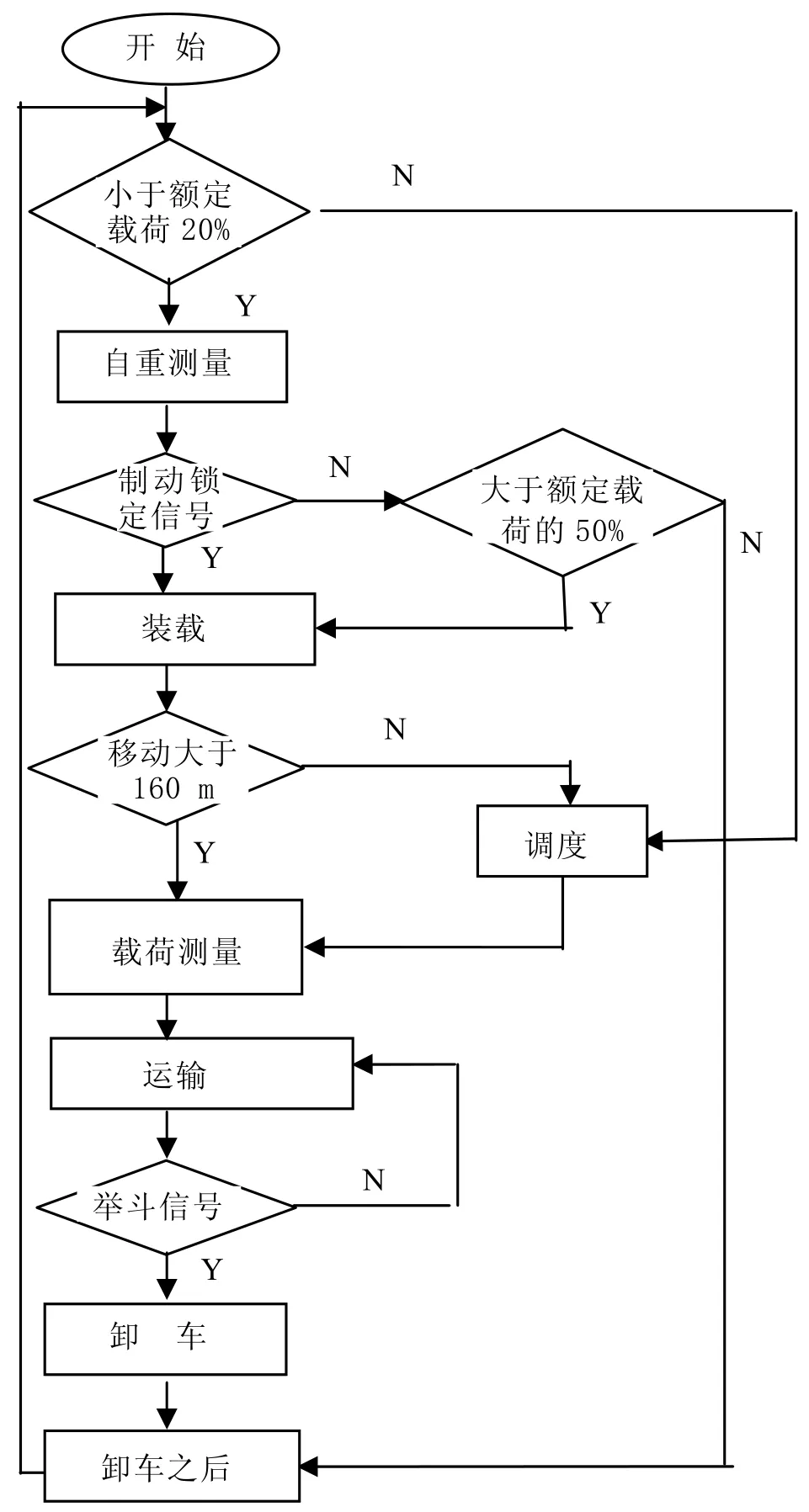
圖2 載荷計算及控制流程圖
2.3 自動稱重系統的基本功能
自動稱重系統具有以下功能:
1) 自動稱重系統可將每個運輸循環的信息保存于數據FLASH中,最多可保存 5208個運輸循環數據,每個運輸循環需包含有效載重量、駕駛員 ID號碼信息、負載和空車的行駛距離、每天空車行駛和停車作業時間、裝車時間、負載和空車最大速度、負載和空車平均速度、車架最大的正扭矩和懸上最大載荷等。
2) 運行狀態監控,即對影響車輛壽命的幾個參數的峰值數據及發生時間進行保存,數據用戶無法刪除,在車輛出現故障時,供維護/管理人員進行故障分析與責任追索。這些數據包括排行最前的5個最大載荷和時間、自動稱重系統記錄了排行前5位的車架正峰值扭矩和負峰值扭矩的數值及其產生時間、排行最前的5個車架正負扭矩和時間以及排行最前的5個最高速度和時間。
3) 錯誤或報警記錄。自動稱重系統具有一定的故障診斷與記錄功能,為維護管理人員分析故障與數據提供依據,主要包括:傳感器故障、設備硬件故障、通訊故障及內存故障等。在運輸循環過程中,只要傳感器出現一個故障,稱重系統就不能正確的計算有效載重量。帶有這種警告標志的運輸循環將不會被認為是準確的。
4) 自動稱重系統配備有設備維護與管理軟件,將安裝有該維護與管理軟件的個人電腦連接到自動稱重系統的通訊端口,可以實現實時數據檢測、參數整定、記錄下載與分析管理等功能。
5) 通訊接口。自動稱重系統可通過國際標準的CAN2.0B協議向外定時發送車輛的實時載荷、前后傾斜度、左右傾斜度、班噸位累計、班運輸次數、總噸位累計、總運輸次數、車輛編號等數據發送至車輛管理系統,并由車輛管理系統無線發送至Intel網上,可以通過Intel網瀏覽車輛的實時運行情況,并可以很方便的統計車輛的運行產量。
3 自動稱重系統的測量精度和誤差分析
3.1 測量結果比較
根據SF33900型220t電動輪自卸車懸掛空載和重載的氮氣壓力理論值和本文中公式(2)(車輛載荷計算公式)計算理論載荷如表1所示;電動輪自卸車在平道運行時,自動稱重系統顯示的載荷和車輛現場測試載荷結果如表2所示;而自卸車在上坡4°和左傾2°運行時,自動稱重系統顯示的載荷和車輛現場測試載荷結果如表3所示。

表1 SF33900型220 t電動輪自卸車懸掛內氮氣壓力和理論計算載荷
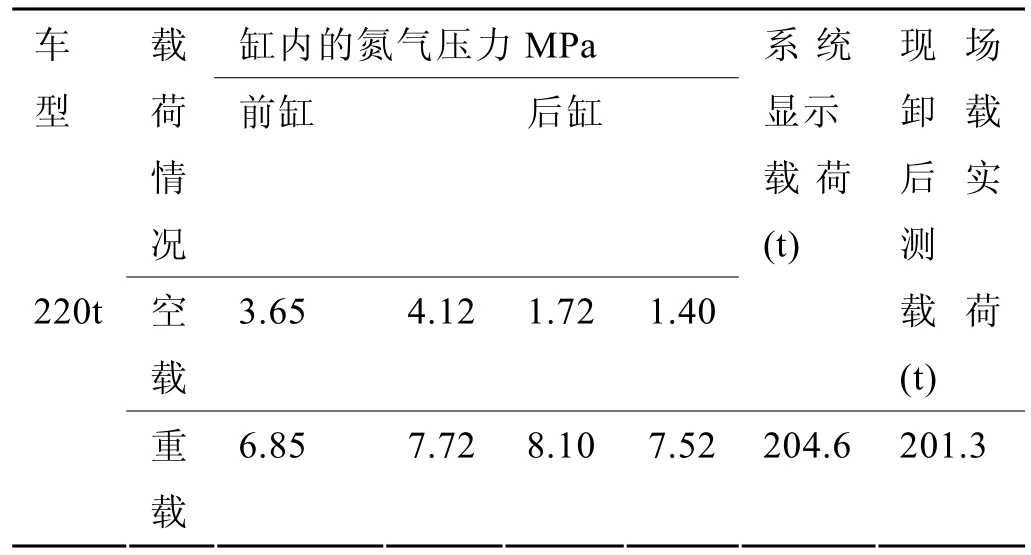
表2 SF33900型220t電動輪自卸車車輛載荷現場測試結果1
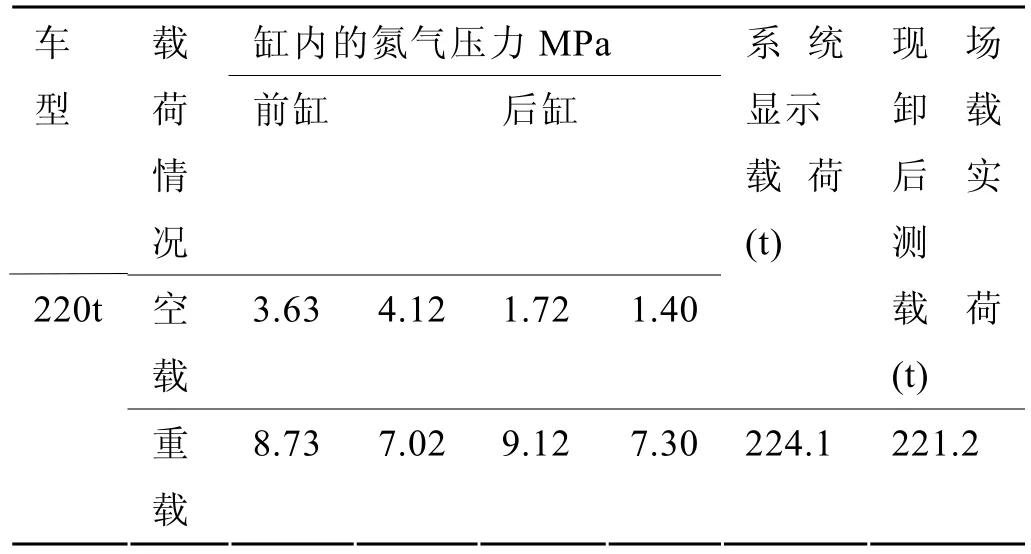
表3 SF33900型220t電動輪自卸車車輛載荷現場測試結果2
表中結果顯示,按規定充氣時整車載荷與理論計算公式的計算非常接近,證明計算公式的正確性。同時,自動稱重系統測量顯示值與車輛裝載貨物卸荷后實測兩者之間誤差小于 2%,證明此系統能滿足使用性能要求。
3.2 有效載重量誤差的來源分析
自動稱重系統計算自卸車載重量的誤差主要是由對懸掛維修時不正確的充氣氣壓引起。
自動稱重系統計算有效載重量是通過對自卸車在空車時和負載時的懸掛承受重量的差異進行測量而達到的,懸掛承受重量就是被懸掛支持的自卸車的重量,確定懸掛承受重量的唯一方法是測量懸掛內氮氣的壓力。
如果懸掛充氮過量,自動稱重系統就不能確定自卸車的空車彈簧承受重量,自卸車在空車行走時,懸掛的液壓缸必然會上下運動,過度充氮氣的懸掛,其內部壓力可以把懸掛推桿完全伸出,這時,液壓缸內的壓力就不能準確地代表支承自卸車這個部分所需的力量;如果懸掛充入氮氣不足,自動稱重系統就不能確定自卸車的負載彈簧承受重量。自卸車在負載行走時,懸掛的液壓缸必然會上下運動,充氮不足的懸掛,其內部壓力如果不能支承這個載荷,懸掛就被壓扁,發生金屬與金屬的接觸。這時,液壓缸內的壓力就不能準確地代表支持自卸車這部分所需的力量。懸掛充油過少也會引起誤差,因為它不能正確地支承著一輛負載的自卸車,這就是為什么懸掛正確的充氣是有效載重量測量中的重要因素的原因。
如果懸掛沒有正確地進行維修保養,就不可能進行準確的有效載重量測量。此外,如果車輛更換懸掛后最好將自動稱重系統進行一次校正,能減少載荷的測量誤差。
4 結束語
在湘電重型裝備股份有限公司生產的SF31904型108 t電動輪自卸車和SF33900型220 t電動輪自卸車上裝設自動稱重系統,有效地提高了礦山管理信息化水平,對提高車輛運行狀態監控、方便車輛維護與運輸調度、加強司機考核等都具有重要意義。
[1]TI Inc.TMS320F2810,TMS320F2812 Digital. Signal Processors Data Manual. http:www.ti.com/litv/pdf/SPRS/174I.pdf,2003,7
[2]龔固豐, 章 兢, 王煉紅, 張小剛. 一種新型船舶智能載重測量儀的研究與應用. 船舶工程, 2009,31(1):19-22.
[3]Modicon Inc. Modbus Protocol Users Guide,1996.
[4]劉篤喜, 徐修明, 許建社等. Modbus協議在分布式伺服測角系統中的應用機床與液壓.
[5]趙登峰, 王國強, 周德成, 王吉林. 自卸車油氣懸掛數學模型仿真研究. 農業機械學報.2003,34(6):40-42.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45