波狀擺動式魚類的推進性能研究
2010-06-07 02:52:00叢文超王志東李力軍
中國艦船研究 2010年4期
關鍵詞:模型
叢文超 王志東 李力軍
江蘇科技大學船舶與建筑工程學院張家港校區,江蘇張家港 215600
波狀擺動式魚類的推進性能研究
叢文超 王志東 李力軍
江蘇科技大學船舶與建筑工程學院張家港校區,江蘇張家港 215600
以開發適用于小型潛器的仿生操縱與推進系統為研究背景,利用計算流體動力學軟件Fluent對波狀擺動式魚類進行了數值模擬,建立波狀擺動式魚類的數值計算模型,研究不同變形參數對魚類推進性能以及尾渦流場結構的影響。結果表明,隨著波長的增加,魚類能夠獲得更好的推進性能。通過對比不同頻率下魚類推進性能以及流場結構,探討不同滑移率及斯特勞哈爾數對推進性能影響。
魚類;波長;斯特勞哈爾數;水動力性能;流場結構
1 引言
水生動物經過幾億年的漫長進化發展出各具特色的水下游動能力,既可以在持久游速下保持低能耗,也可以在爆發游速下產生快速機動響應,是當前普遍采用螺旋槳推進的水面或水下航行器所無法比擬的。水生動物的運動方式可以分為纖毛推進、射流反沖推進、波狀擺動推進。其中波狀擺動推進是各類水生動物最廣泛采用的一種游動方式,所謂波狀擺動推進是指其身體作橫向扭曲往復擺動,以橫向行進波的形式沿身體傳播。按魚體及其背鰭、腹鰭和尾鰭的波狀游動特點,可以將魚類波狀擺動推進方式劃分為多種運動模式。但如果只顧及魚體的運動,按照 Lightill[1]的提法可劃分為鰻鱺模式、鲹科模式及月牙尾推進模式。
對于魚類波狀擺動推進機理的理論研究和數值模擬,童秉綱等[2-3]建立了模擬魚類游動的三維波動柔板理論,結合線性化的物面邊界條件和平面尾流模型,采用勢流理論的三維非定常渦格法在頻率內求解,研究了魚類的游動和推進機理。Liu和Kawachi等[4]利用蝌蚪模型分析三維波狀游動模式的水動力和推進機理,給出了魚類波狀運動時尾渦流場與噴流推進的關系。Gilmanov和Sotiropoulos等[5]采用內置邊條方法實現動邊界的處理,并對鯖魚進行了數值模擬,分析了滑移率U/V對尾流場結構以及水動力系數的影響。Borazjani和 Sotiropoulos[6]對鲹科運動模式(鯖魚)進行數值模擬,指出雷諾數對鲹科類游動的水動力性能具有重要影響,給出了鯖魚的三維尾渦流場結構,表明影響流場結構的因素主要是斯特勞哈爾數。Zhu和Wolfgang等[7]利用三維非線性無粘數值方法建立了三維仿魚模型,探討了仿魚游動的渦控制機理。周林慧和王志東等[8-10]開展了二維和三維柔性擺動尾鰭水動力特性研究,探討了斯特勞哈爾數、柔性系數和最大攻角等對尾鰭水動力性能及流場結構的影響。王志東,等[11]研究了尾鰭弦向展向變形對水動力性能以及渦流場結構的影響。陳宏,等[12]利用大擺幅細長體理論,結合水動力理論、能量守恒原理及效率理論,研究了仿生機器金槍魚游動的力學機理,建立了機器金槍魚的運動學物理模型,推導出動力學方程和效率計算公式。
實驗研究方面,Sakakibara 和 Nakagawa 等[13]采用DPIV對活魚周圍流場進行直接測量,分析了尾部流場結構是由交替渦間曲折的射流構成。Jenniffer和George[14]基于鯖科魚流線型身體和正型尾鰭,利用DPIV對不同尾鰭區域的尾跡結構進行了測試。
本文利用計算流體軟件F luent對二維全魚模型進行了數值計算,分析了不同波長,不同斯特勞哈爾數下全魚模型的水動力性以及流場結構。
2 數值計算模型
2.1 控制方程以及數值計算方法
考慮粘性以及不可壓縮流動,建立如下連續方程和運動方程:
上式中,ui(i=1,2)為流體運動速度;xi(i=1,2)為空間坐標;p為流體壓強;t為時間;γ為運動粘性系數;γt=cμk2/ε 為湍流粘性系數;k 為湍流動能;ε為湍動能耗散率;cμ為常數;湍流模型采用SST k-w模型。
控制方程的求解基于有限體積法,擴散項和對流項采用具有三階精度的QUICK格式離散,壓力和速度的耦合則使用適合于瞬態問題求解的PISO算法,其中全魚的變形模式則通過編制用戶自定義程序實現。
2.2 數值計算模型以及邊界條件
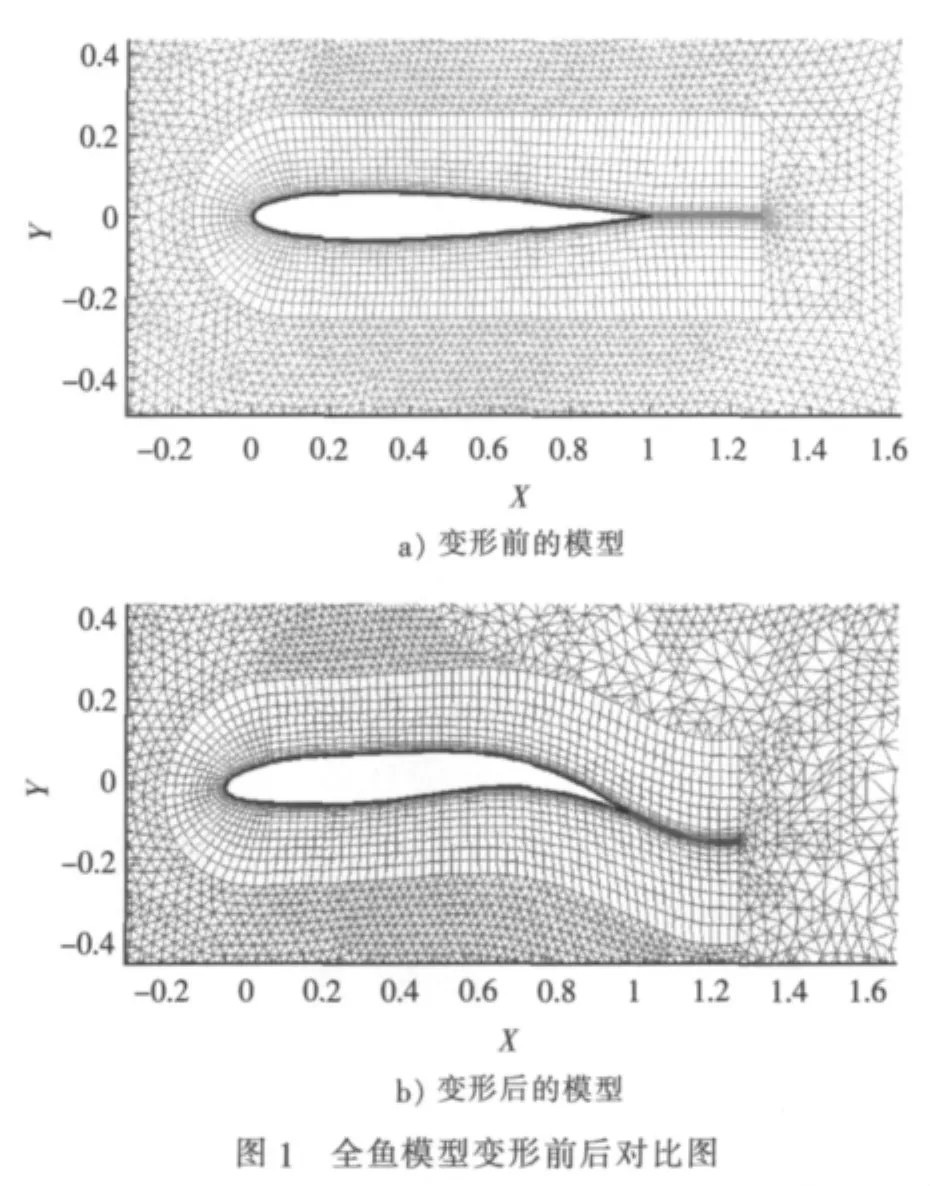
為了簡化模型,采用NACA0012翼型來代替二維全魚模型,計算區域為6L×22L,其中L為全魚模型體長。綜合考慮計算速度和計算精度,采用混合網格系統,網格數為22 260,同時為了更好地捕捉對柔性擺動水翼推進性能起重要作用的邊界層內流動的變化,在水翼周圍布置了結構網格,并在靠近壁面的地方進行了加密。對于邊界條件的設定,左邊界和上下邊界定為速度入口,右邊定為壓力出口。圖1給出了網格及魚體變形示意圖。
2.3 魚類整體變形模型
鲹科魚類的運動是以沿身體向后傳送行進波來實現的,并且最大擺幅發生在魚體尾部。Videler和Hess[15]以實驗觀測為基礎,利用傅立葉數列描述了鯖魚的波狀擺動,并提出魚體橫向波動方程:

式中,x 為沿魚體方向位置坐標,y(x,t)為 t時刻橫向坐標位置;κ為波數,κ=2π/λ,其中λ為波長;ω 為圓頻率,ω=2πf;a(x)為橫向運動的幅值。

式中,a0= 0.02;a1= -0.08;a2= 0.16。圖 2 給出了波長分別為0.95,1.3時魚體體干線。在魚體尾部擺幅達到最大值 amax=0.1,相對應的 ymax=0.1L (L 為體長)。 當 x=L/4 時,amax=0.01; 當 x=0,a (x)=0.02。
此外,魚體運動參數定義如下:滑移率β=U/V=U/λf,其中 U 為來流速度,V 為波速 V=λ/T;斯特勞哈爾數St=fA/U,其中A為尾部最大橫向距離,A=0.2ymax,f為擺動頻率。

2.4 力系數、功率系數、推進效率的定義
定義全魚的推力、力矩和功率等系數如下:


3 二維全魚模型的數值計算
3.1 水動力系數計算
計算工況:取來流速度 1.2,波長分別取 0.95、1.3,頻率分別取 0.6 Hz,1.2 Hz,1.5 Hz,1.8 Hz,2.1 Hz。
圖3給出了在相同頻率、相同速度下,不同波長的推力系數,通過比較可以發現波長為1.3時的推力系數明顯大于波長為0.95時的推力系數,由此可以推出波速越快全魚的推進性能越好。圖4給出了相同來流速度、相同波長,不同滑移率下推力系數,從圖中可以看出,當滑移率大于1時(即魚體波動速度小于游動速度時)X方向的力為純阻力,而當滑移率小于1時(即魚體波動速度大于游動速度時)X方向的力為純推力,這種現象與Gilmanov 和 Sotiropoulos[5]所提出的滑移率對推進性能影響是一致的,因此證明了本文計算的合理性。
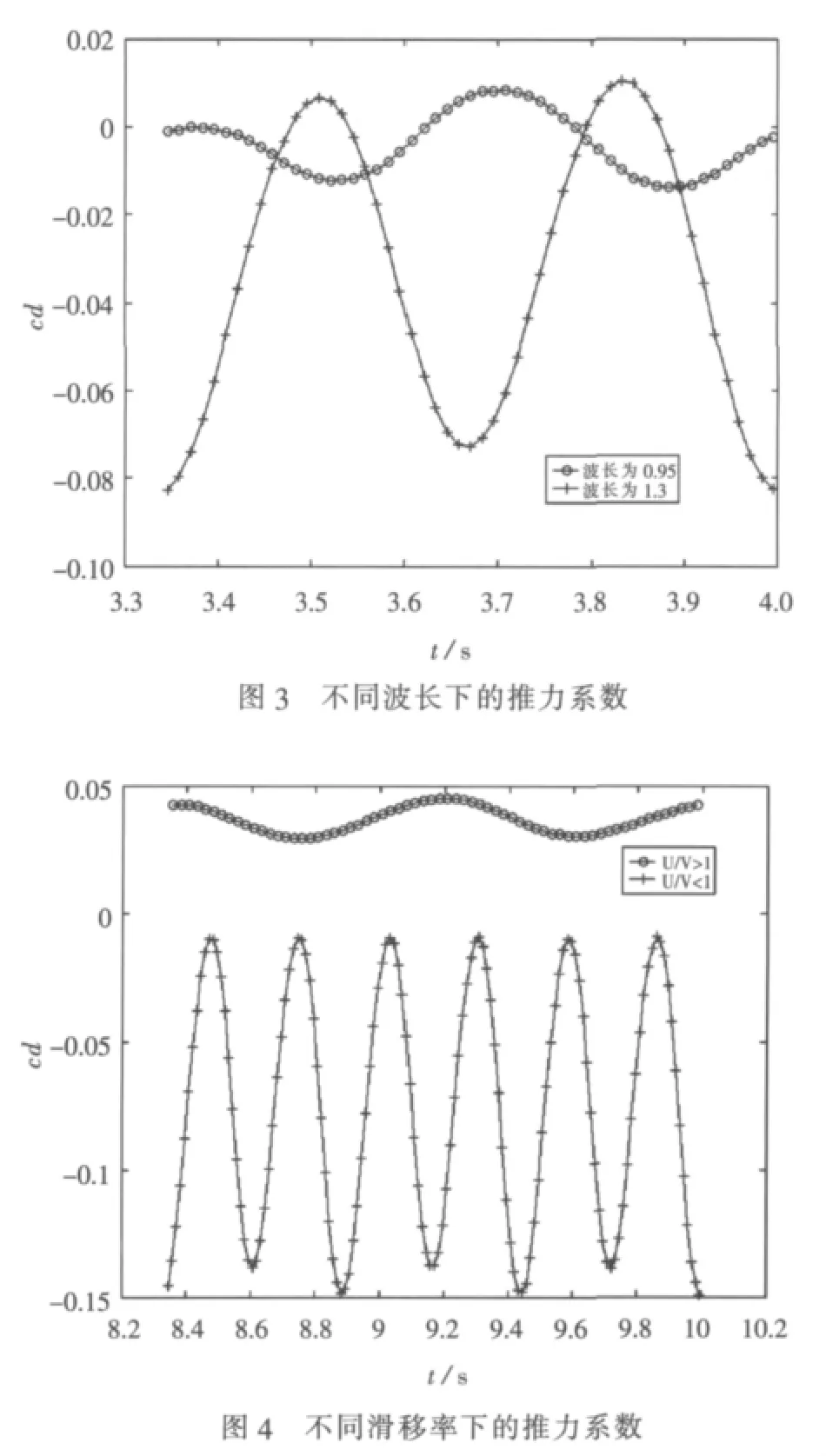
圖5分別給出了不同波長下推力系數、頻率隨斯特勞哈爾數的變化曲線,由圖5(a)可以看出在相同的St下,波長為1.3時的推力系數明顯大于波長為0.95時的推力系數,并且在波長為1.3,St處于 0.1~0.18 范圍內時,魚體沒有獲得推力,并且發現在這個區域內推力系數變化趨勢緩慢;當St位于 0.18~0.4 范圍內時,魚體獲得了純推力,同時推力系數增長較快, 且當St處于0.25~0.35之間時,魚類的推進效率最佳。
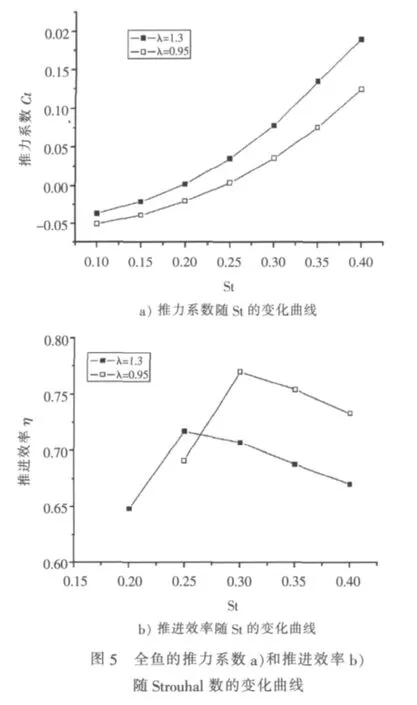
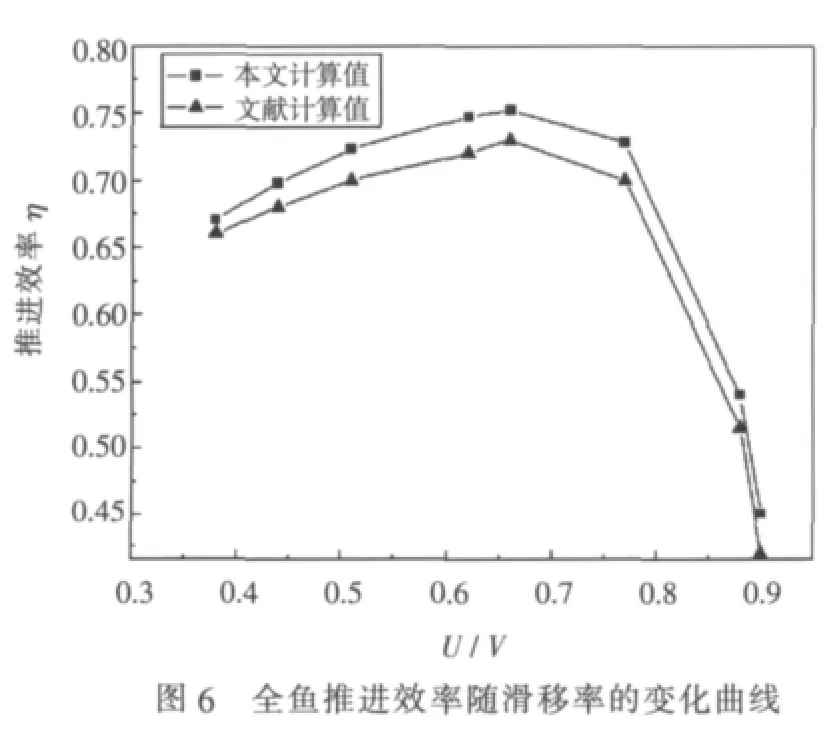
圖6給出了本文中全魚推進效率計算值與文獻[17]中推進效率計算值隨滑移率的變化對比曲線。可以看出,兩條曲線的變化趨勢是一致的,表明了本文數值計算模型及計算結果的合理性。
3.2 尾跡流場結構
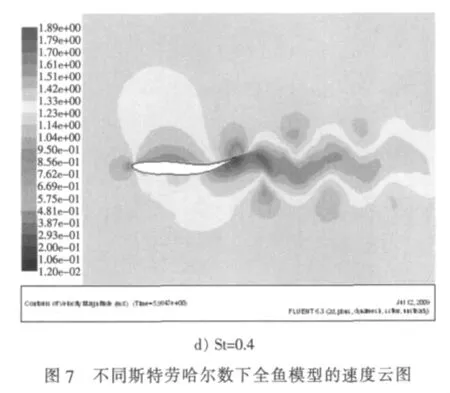
尾跡渦系的演化過程直接影響著魚的水動力特性,通過研究全魚模型的波狀擺動式運動所引起的非定常流場對于探明魚類的游動機理具有重要意義。圖7給出不同斯特勞哈爾數下全魚模型的速度云圖,由圖可以看出,當斯特勞哈爾數大于0.2時,尾流場產生反卡門渦階,同時在尾流中間區域伴隨著強度很大的射流,產生一個向前的推力。雖然射流的強度和寬度在增加,隨之通過渦脫落在尾跡中消耗的能量也越多,但是隨著斯特勞哈爾數的增加,還是會有更多的渦從尾緣脫落。因此通過對魚體尾跡渦流場的分析,可以解釋如圖5中推力系數隨著斯特勞哈爾數的增加而逐漸增加而推進效率卻會在St=0.25達到峰值的現象。
4 結論

通過建立二維全魚的物理模型以及波狀擺動方程,對魚類波狀式擺動進行了數值模擬,分別探討了斯勞哈爾數、波長、滑移率對全魚推進性能的影響,給出了不同斯特勞哈爾數下全魚的推力系數以及流場結構,分析了全魚尾跡渦流場結構對水動力系數的影響。同時,本文也為研究三維全魚模型的推進機理提供了思路。
[1] LIGHTHILL J.Mathematical Bio fluid dynamic[M].Cambridge:University of Cambridge SIAM.1975.
[2] 童秉綱,莊禮賢.描述魚類波狀游動的流體力學模型及應用[J].自然雜志,1998,20(1):1-7.
[3] 童秉綱,莊禮賢,程健宇.魚類波狀擺動推進的流體力學研究[J].力學與實踐,1991,19(3):17-26.
[4] LIU H,KAWACHI K.A n umerical s tudy of u ndulatory s wimming [J].Journal of Computational Physics,1999,155(2):223-247.
[5] GILMANOV A,SOTIROPOULOS F.A h ybrid Cartesian/immersed boundary method for simulating flows with 3D,geometrically complex moving bodies[J].Journal of Computational Physics,2005,207(2):457-492.
[6] BORAZJANI I,SOTIROPOULOS F.Numerical investigation of the hydrodynamics of carangiform of swimming in the transitional and inertial flow regimes [J].Journal of Experimental Biology,2008,211:1541-1558.
[7] ZHU Q,WOLFGANG M J,YUE D K P,et al.Three-dimensional flow structures and vorticity control in fish-like swimming[J].J.Fluid Mech,2002,468:1-28.
[8] 周林慧.水下仿生推進系統水動力特性研究[D].鎮江:江蘇科技大學,2005.
[9] WANG Z D,ZHANG X Q,SU Y M,et al.Analysis of the caudal vortices evolvement around flapping foil[J].Journal of Bionics Engineering,2005,4:195-201.
[10]王志東,張曉慶,周林慧.三維擺動尾鰭的數值模擬[J].江蘇科技大學學報,2006,20(1):6-10.
[11]WANG Z D,CHEN P,ZHANGX Q.Wake vortex structure characteristics of a flexible oscillating fin [J].Journal of Bionic engineering,2008,5(1):49-54.
[12]陳宏,竺長安,尹協振,等.基于Matlab的機器金槍魚巡游的動力學仿真[J].系統仿真學報,2006,18(1):207-212.
[13]SAKAKIBARA J,NAKAGAWA M,YOSHIDA M.Stereo-PIV study of flow around a maneuvering fish [J].Experiments in Fluids,2004,36(2):282-293.
[14]JENNIFER C N,GEORGE V L.Hydrodynamics of caudal fin locomotion by chub mackerel, Scomber japonicus[J].The Journal of Experimental Biology,2002,205:1709 -1724.
[15]VIDELER J J,HESS F.Fast continuous swimming of two pelagic predators, saithe (Pollachius virens) and mackerel(Scomber scombrus): A kinematic analysis[J].The Journal Experimental Biology,1984,109:209-228.
[16]PEDLEY T J,HILL S J.Large-amplitude undulatory fish swimming:fluid mechanics coupled to internalmechanics[J].The Journal Experimental Biology,1999,202 (23):3431-3438.
[17]CHENG J Y,BLICKHAN R.Note on calculation of propeller efficiency using elongated body theory [J].The Journal Experimental Biology,1994,192(1):169-177.
A Numerical Simulation of the Propulsion Performance of Undulatory Fish Swimming
Cong Wen-chao Wang Zhi-dong Li Li-jun
School of Naval Architecture and Civil Engineering,Zhangjiagang Campus of Jiangsu University of Science and Technology,Zh angjiagang 215600, China
Aimin g at development of bionicmaneuverable propulsion system applied in the small underwater vehicle,a numerical simulation of hydrodynamic characters of undulatory fish swimming was completed by means of the CFD software Fluent.The numerical calculation model of undulatory fish swimming was established.The effect of deformation parameters on the propulsion performance and vortex flow field structure was studied.The results show that greater propulsion is acquired when the wave length is increasing.The effect of slip ratio and Strouhal number on the propulsion performance is discussed by comparing both flow field structure and propulsion performance of fish under different frequencies.
fish; wave length; Strouhal number; hydrodynamic performance; flow field structure
U664.3
A
1673-3185(2010)04-01-05
10.3969/j.issn.1673-3185.2010.04.001
2009-10-10
國家自然科學基金資助項目(50879031)
叢文超(1983- ),女,碩士研究生。 研究方向:船舶流體力學。E-mail:congwenchao_02jy@ yahhoo.com.cn
王志東(1967-),男,教授。研究方向:水下航行器仿生推進機理及船舶操縱性特性。E-mail:cywzd@sina.com
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19