基于SESAM的游釣船動力響應研究
2010-06-13 07:53:26趙林崗謝永和
浙江海洋大學學報(自然科學版) 2010年6期
關鍵詞:船舶
趙林崗,徐 升,謝永和
(1.浙江海洋學院水產學院,浙江舟山 316004;2.浙江海洋學院船舶與建筑工程學院,浙江舟山 316004)
游釣船是一種特制的輕便、快速,具有導航、定位、通訊和現代服務設施的專職出租、導釣、載客的釣魚船。除船釣外,還可以把釣客送上富魚區的海礁、海島荒磯上垂釣,再按航程安排,及時地接送釣客返回。游釣船設計的船速一般都在20 kn以上,這就對其要求有較高的穩性。由此可見,對游釣船進行運動和波浪載荷響應計算,有助于保障其安全作業。
SESAM系統就是基于三維線性勢流理論設計的用于船舶與海洋工程結構物水動力分析計算的綜合性軟件。該軟件不僅適用于船舶工程領域,也成功地應用于多種海洋結構物的設計和分析[1]。筆者采用SESAM程序系統的PatranPre模塊對14.56 m游釣船建立水動力模型,在HydroD模塊中進行運動與波浪載荷響應計算,對其水動力特性進行分析。
1 水動力計算的相關理論和程序
船舶在波浪上運動的流體動力問題關鍵在于求解流場中的速度勢,即求解在確定的邊界條件下的拉普拉斯方程。
1.1 船舶運動方程[2]
根據速度勢的分布可將船舶的流體動力分解為船舶定常移動興波所產生的定常阻力、波浪擾動力和船體運動遭受的流體反作用力(簡稱輻射力)組成,則船舶在規則波中的運動方程為:

式中,mij為船體質量;μij附加質量;λij為阻尼系數;Cij為恢復力系數;FkWi為佛汝德·克雷洛夫力;FdWi為波浪繞射力。
1.2 計算程序
使用SESAM程序計算船體運動與波浪載荷響應,其具體步驟如下:
1)通過PatranPre模塊建立游釣船的水動力模型;
2)在HydroD中進行環境參數的設定;
3)將建好的水動力模型導入到HydroD模塊中進行計算;
4)用WADAM模塊確定浪向及間隔、頻率及間隔等參數;
5)最后用POSTRESP模塊進行后處理,得出其動力響應。
2 水動力模型
2.1 主要參數
游釣船折角線和主尺度分別見圖1和表1。
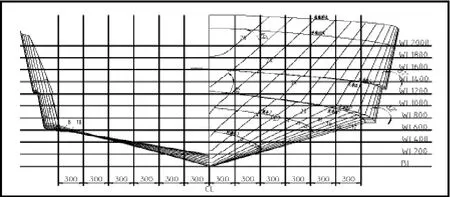
圖1 折角線示意圖Fig.1 Schematic diagram of knuckle line

表1 主尺度Tab.1 Ship's principal dimensions
2.2 水動力模型
選用SESAM系統的PatranPre模塊對其建立水動力模型即 Panel Model,如圖2~4所示。坐標系x方向指向船艏,y方向指向左舷,z方向向上,坐標原點在基線面、中橫剖面、中縱剖面的交點。肋位間距500 mm,以一肋位一單元進行建模,最后對模型進行優化得到水動力模型。

圖2 水動力模型Fig.2 Hydrodynamic model

圖3 施加HydroD后的模型Fig.3 Hydrodynamic model applied by HydroD

圖4 HydroD中的水動力模型Fig.4 Hydrodynamic mode in HydroD
3 游釣船的波浪誘導載荷及運動響應分析
3.1 海浪譜
在一般情況下,常把海浪視為無限多個頻率不等、方向不同、振幅變化而相位雜亂的微幅簡諧波疊加而成的不規則波系,這些特征可以用海浪譜表示出來。通常用到的海浪譜有3種即Gamma海浪譜、Pierson-Moskowitz海浪譜和JONSWAP海浪譜。本論文中的波浪載荷直接計算采用的波浪譜是Pierson-Moskowitz海浪譜。
浪向角取值區間[0°~180°]步長為 30°,包括了 5 種浪向的波浪(迎浪、首斜浪、橫浪、尾斜浪和隨浪)。波浪頻率為0.5~2.0 rad/s,步長為0.05 rad/s。 波浪載荷設計計算值取為10-8概率水平(代表設計壽命為20年)。
3.2 波浪誘導載荷的計算
根據上面選定的設計波,由伯努利方程計算可得游釣船的表面水壓力。本論文主要計算波浪誘導彎矩,計算結果如圖5所示。
3.3 運動響應分析
對游釣船通過水動力計算,可知在其運動響應中,由波浪引起的橫搖(roll)、首搖(yaw)和縱搖(pitch)運動都比較小,本文中游釣船的運動響應主要考慮縱蕩(surge)垂蕩(heave)和橫蕩(sway)的影響。
由圖6可以看出,在游釣船縱蕩運動時,浪向角β=0°和β=180°時,船舶縱蕩的運動幅值最大,并且隨著波浪頻率的減小而增大;浪向角β=90°時,船舶的縱蕩運動幅值最小。
由圖7可以看出,在游釣船垂蕩運動時,浪向角β=90°時,船舶升沉的運動幅值最大;浪向角為β=0°時,船舶升沉的運動幅值最小,并且隨著波浪頻率的增大而減小。
由圖8可以看出,在游釣船橫蕩運動時,浪向角β=0°和β=180°時,船舶橫蕩的運動幅值最小;浪向角 β=90°時,船舶橫蕩的運動幅值最大,并且隨著波浪頻率的減小而增大。
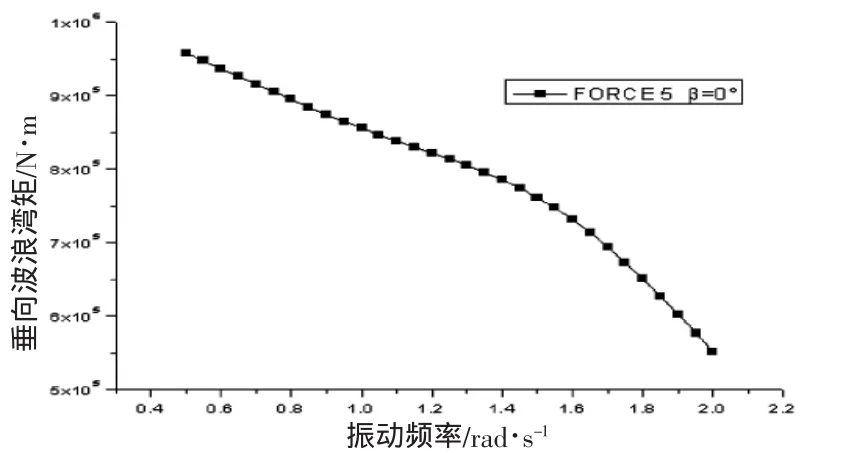
圖5 波浪彎矩幅值隨頻率變化曲線Fig.5 Change curve of wave bending moment with frequency

圖6 縱蕩運動幅值響應隨頻率變化曲線Fig.6 Change curve of surge amplitude with frequency
4 結束語
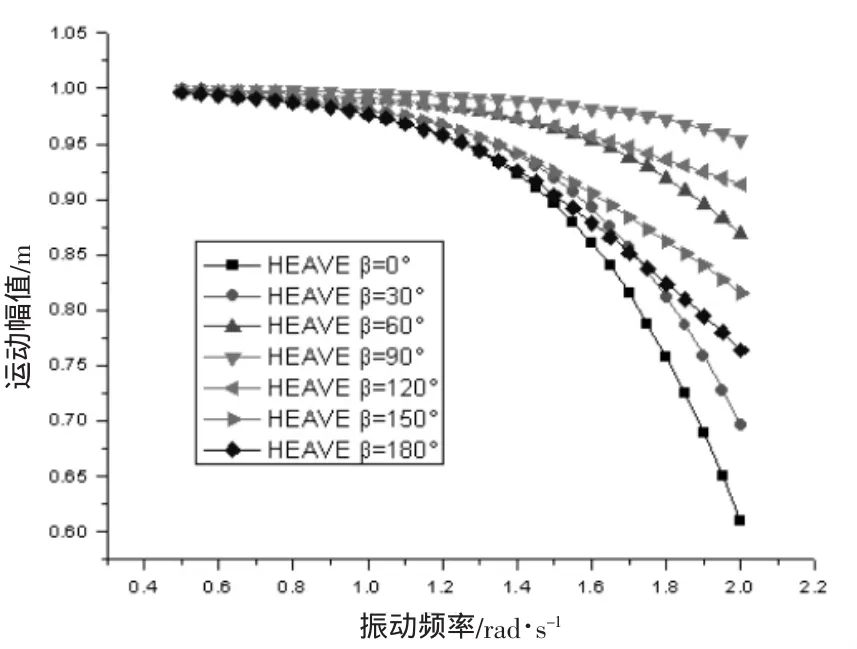
圖7 垂蕩運動幅值響應隨頻率變化曲線Fig.7 Change curve of yaw amplitude with frequency
本文依托于三維線性勢流理論,運用SESAM軟件中的PatranPre模塊和HydroD模塊對游釣船進行了波浪誘導載荷計算和運動響應分析,比較準確的預報了游釣船的水動力響應特性,可以使其在運營中避開波浪能集中的頻率范圍,使游釣船具有較小的波浪響應,從而確保其安全運營。
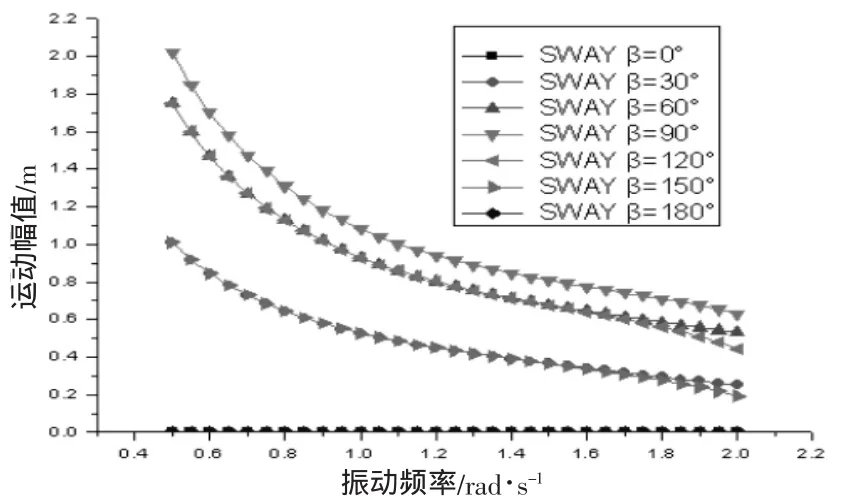
圖8 橫蕩運動幅值響應隨頻率變化曲線Fig.8 Change curve of sway amplitude with frequency
[1]陳海龍,白雪平,劉成名,等.利用SESAM軟件對駁船進行水動力性能分析研究[J].傳感器與微系統,2009,28(12):48-50.
[2]李剛強,謝永和.肥大型集裝箱船波浪誘導載荷研究[J].浙江海洋學院學報:自然科學版,2009,28(2):125-129.
[3]李潤培,王志農.海洋平臺強度分析[M].上海:上海交通大學出版社,1992.
[4]XIE Yong-he,LI Run-pei.Wave-Induced Loads on Very Large FPSOs at Restricted Water Depth[J].China Ocean Engineering,2005,19(2):215-224.
[5]劉應中,繆國平.船舶在波浪上的運動理論[M].北京:上海交通大學出版社,1988.
[6]STOKER J J.Water waves[M].New York:Interscience,1957.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30
