
應用于礦用電機車的新型交流牽引驅動系統
2010-07-02 01:13:21李保生杜貴平
自動化與信息工程 2010年1期
李保生 杜貴平
(1.永濟新時速電機電器有限責任公司 2.華南理工大學)
應用于礦用電機車的新型交流牽引驅動系統
李保生1杜貴平2
(1.永濟新時速電機電器有限責任公司 2.華南理工大學)
針對架線式礦用電機車負載變化頻繁、供電波動較大、工作環境惡劣等具體工程實際問題,提出了具有最大轉矩輸出能力的改進型轉差頻率控制方法及重載轉矩補償和母線電壓補償措施,研制了DC550V/ 300KW實驗樣機。仿真和實驗表明,驅動系統在啟動和拖動過程均具有較大的轉矩輸出能力和良好的動態響應特性,提高了牽引性能和系統的可靠性。
礦用電機車;最大轉矩;轉差頻率
1 引言
架線式窄軌電機車是廣泛應用于地下鐵道及工礦挖掘工程等領域的重要牽引動力設備,經常面臨負載變化頻繁、供電波動較大、工作環境惡劣(振動、潮濕、腐蝕等)等具體工程實際問題,針對上述問題及需求,綜合考慮目前交流驅動系統主流控制方法的優缺點[1~5],兼顧工程實用性和技術先進性,研究并提出了具有較大轉矩輸出的改進型轉差頻率控制方法以及母線電壓補償及重載轉矩補償措施,設計了工程樣機,并開展了仿真和實驗研究。
2 系統構成及工作原理
驅動系統主要由功率電路、系統控制電路、保護電路三部分構成,系統結構如圖1所示:
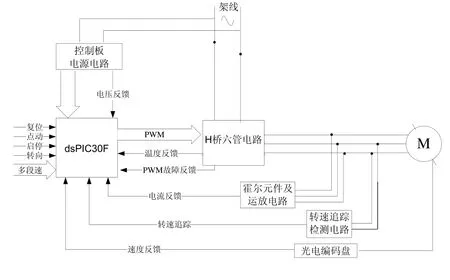
圖1 系統總體框圖
主功率電路主要由浪涌抑制環節、直流側濾波電容、制動模塊、三相逆變橋及緩沖吸收電路組成。架線直流電壓經濾波后,由控制電路通過脈寬調制信號控制三相逆變橋的功率管工作輸出正玄電流,拖動電機運行;浪涌抑制環節防止開機浪涌沖擊,制動模塊實現機車的有效制動,緩沖吸收電路用來減小功率開關管的電應力,保證逆變橋穩定工作。
系統控制電路由輔助電源電路、數字控制電路和驅動電路組成。輔助電源電路將架線電壓經濾波、穩壓、分壓、高頻變換、變壓器處理等環節為控制電路提供各等級的直流電源;數字控制電路實現信號的綜合分析、控制算法和用戶界面的設計;驅動電路實現對六管電路IGBT器件的驅動處理。
保護監測包括電流、電壓、溫度保護電路。電流保護電路是對電機定子電流的檢測保護電路;電壓保護電路是指對直流側電壓的檢測、保護并進行相關補償;溫度保護電路是對變頻器底座溫度的檢測保護,避免過熱引起變頻器異常。
3 最大轉矩轉差頻率控制策略
窄軌電機車通常運行路面不平坦,負載較重,除了要求具有良好的動態性能和調速特性以外,還要求機車能夠應對重載情況,并具有較大的輸出轉矩,尤其是啟動轉矩。異步電機起動轉矩與頻率有關,起動時,一般轉速較低,但起動轉矩與頻率并非簡單的單調遞增或遞減關系。為了得到最大起動轉矩,對轉矩與轉差頻率的關系進行進一步的探討:
異步電機轉矩與電壓、轉差率、頻率間的關系[6]:
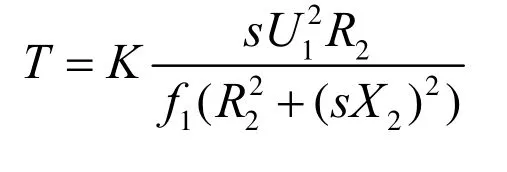
K為電機結構參數,代入相關參量可得:
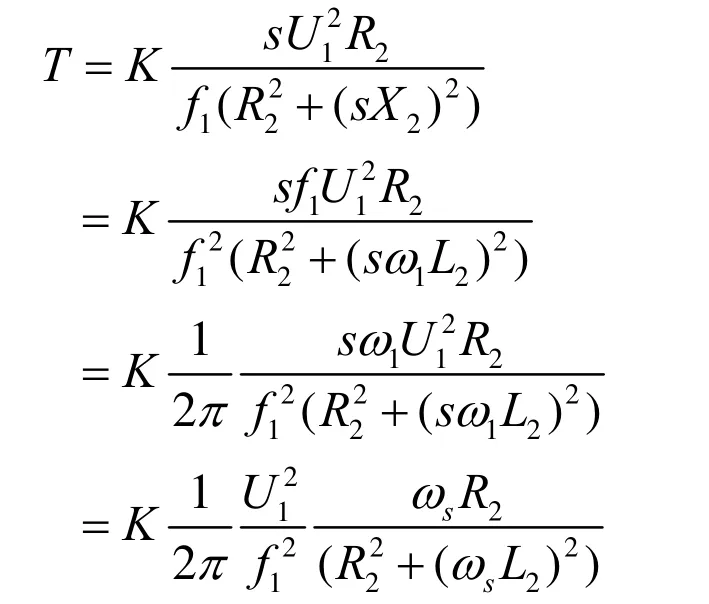
可得轉矩與轉差頻率的關系如下:

其中,Ks是依賴于電機結構的參數,在磁通恒定時為常數。在電機穩定運行時,轉差頻率sω很小。
異步電機起動瞬間,轉差率s=1,此時sω=ω,將此關系代入式(1),可得到起動轉矩與頻率的函數關系式:

將上式對頻率求導等于零,可得到最大起動轉矩對應的頻率,即:

因此,當sω滿足下式(4)關系時,電機具有最大起動轉矩,記此時的轉差頻率為ωmax。

進一步研究,可以發現,在運行過程中保證上式成立,可得到最大輸出轉矩。傳統轉差頻率法限制了因而傳統轉差頻率法不具備最大起動轉矩。為了消除PI參數的影響,同時得到最大轉矩,在本文的算法中,不再引入PI調節器。最大轉矩轉差頻率法的控制規律簡要如以下公式表示:

其中ωref表示參考角速度,2ω表示實測轉速的旋轉角速度;ωmax表示最大轉矩對應的轉差角頻率。
在電機啟動瞬間,反饋轉速為零,此時根據式(4),得到的轉差頻率對應最大轉矩,保證最大啟動轉矩。而在運行過程中也保持對轉差頻率的控制,因此系統具備最大輸出轉矩功能。
與傳統轉差頻率法相比,本控制策略無須PI調節,而是根據式(5)進行簡單的運算得到對應最大轉矩的轉差頻率。同時,利用恒壓頻比方法代替傳統方法的電流-轉差頻率曲線,便于數字化實現。
本文提出的方法在機車穩定運行時具有最大的輸出轉矩,在重載時也通過調整電壓補償轉矩,使整個控制過程保持較大的輸出轉矩,不僅適應機車運行的實際情況,且修正了傳統轉差頻率法的不足,易于數字化實現。
4 仿真及實驗研究
為了驗證最大轉矩轉差頻率法的大轉矩輸出特性,利用MATLAB/SIMULINK構建了系統的控制模型,見圖2。
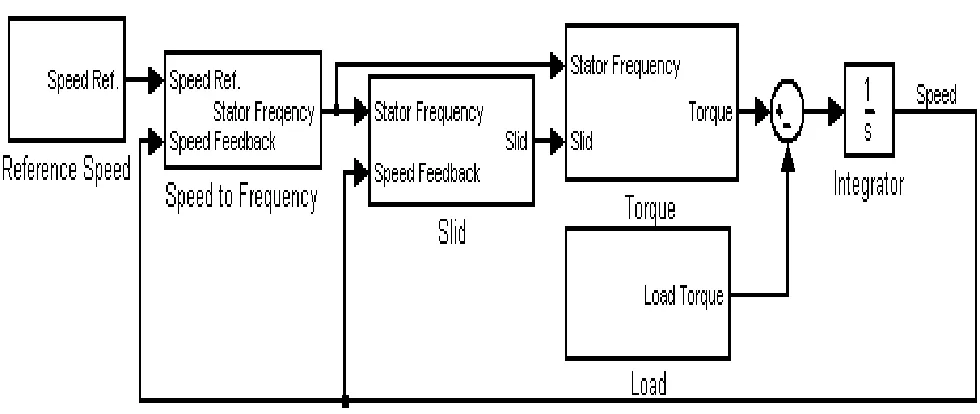
圖2 最大轉矩轉差頻率法Simulink仿真框圖
圖3為最大轉矩轉差頻率法與開環恒壓頻比方法的人為特性仿真曲線,參考轉速3000r/min。
圖3反映了調速過程中,轉矩的變化情況。由圖可明顯看出,最大轉矩轉差頻率方法具有較大的起動轉矩,且在調速過程中始終保持最大的轉矩輸出,轉矩的變化較為平整。雖然以上最大轉矩轉差頻率法比較的對象是開環恒壓頻比方法,但其結果適用于最大轉矩轉差頻率法與傳統轉差頻率法的比較。另外,與傳統轉差頻率方法相比,最大轉矩轉差頻率方法還有無需調節控制器參數,移植性好等特點。
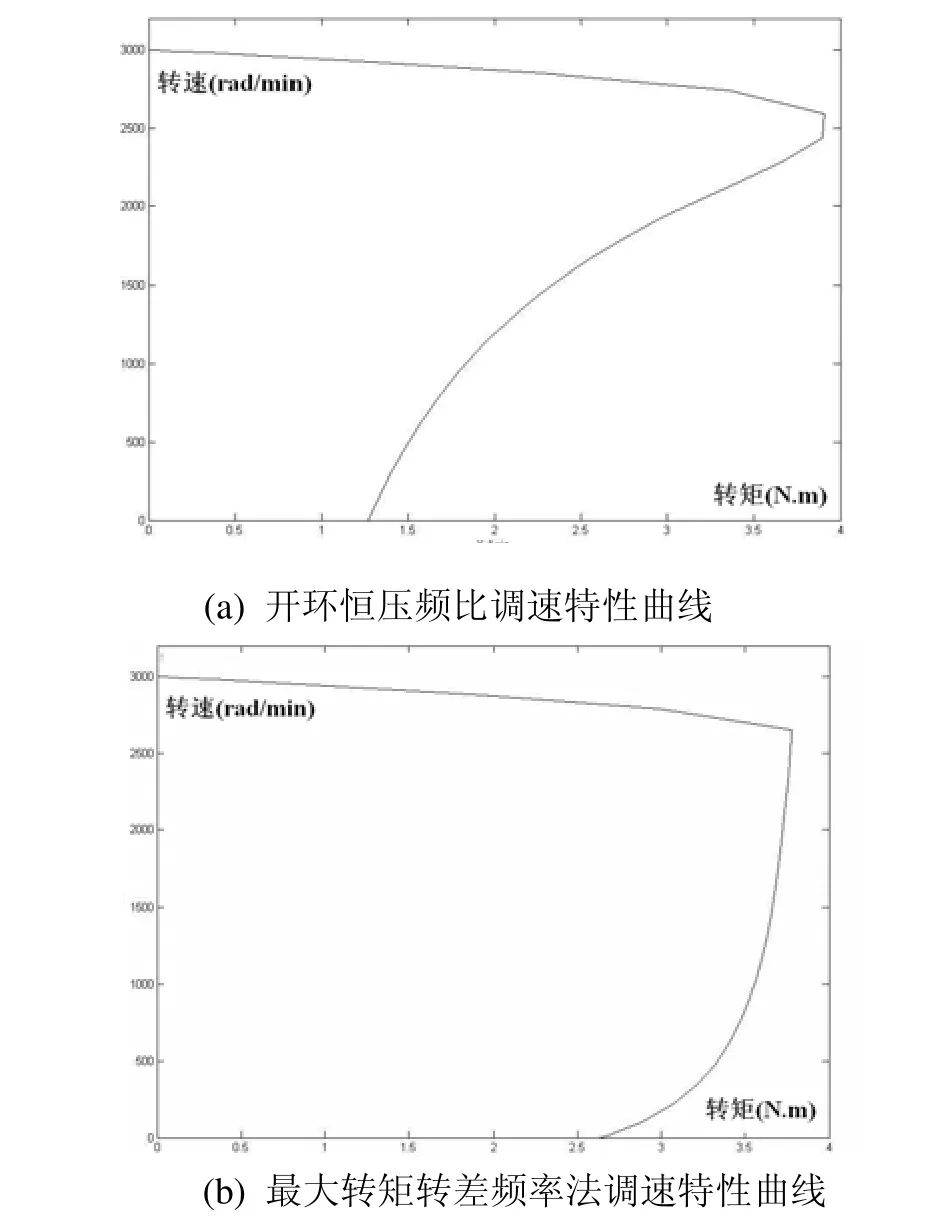
圖3 最大轉矩轉差頻率法與開環恒壓頻比方法調速過程轉矩變化比較圖
基于以上算法,實際研制了DC550V/300kW工礦用電機車交流驅動系統(見圖1),并進行了現場模擬試驗,閉環模式下設定參考頻率為50Hz,穩定運行時定子電流波形如圖4。由圖中可以看出,此時輸出電流具有良好的正弦特性。
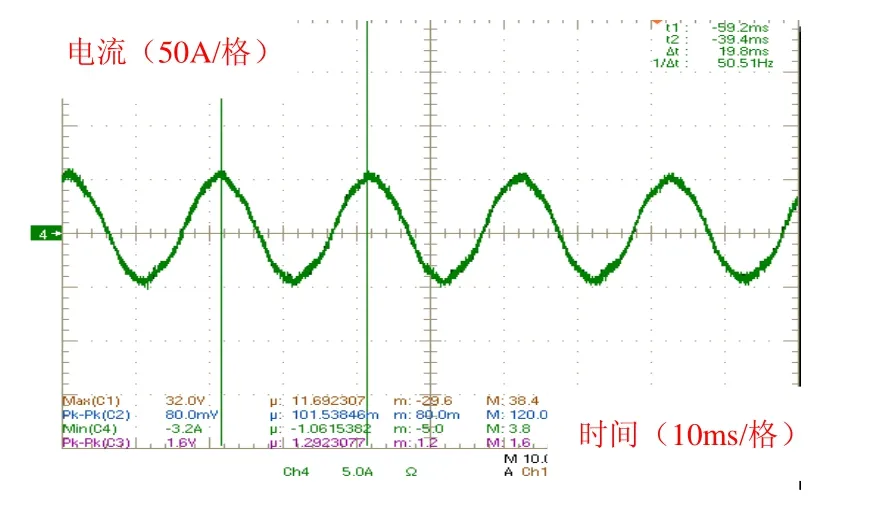
圖4 閉環模式參考頻率50Hz定子電流波形
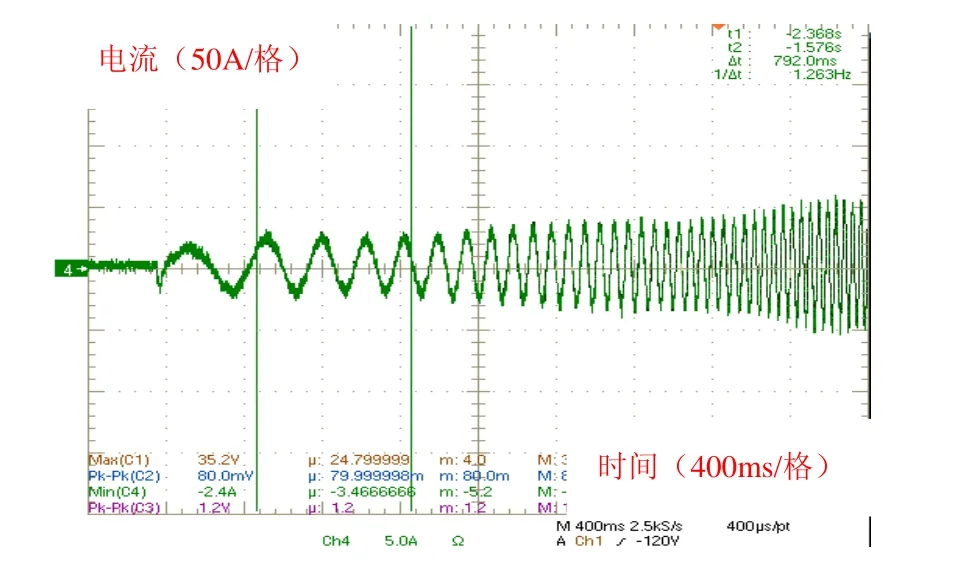
圖5 閉環模式下電機升速過程定子電流波形
為了驗證本文控制算法調速過程平穩、轉矩沖擊小等特點,我們觀察了電機升速的電流波形,見圖5。從圖中可看出升降速過程較快,且過程中轉矩穩定(表現為電流幅值變化穩定),不存在轉矩沖擊(電流幅值不存在突變)。
5 結論
針對機車要求較大轉矩、運行環境惡劣等情況,本文從最大啟動轉矩推導出發,在傳統轉差頻率法的基礎上加以改進,提出最大轉矩轉差頻率法。理論研究及仿真試驗表明該方法具有更優良的轉矩輸出特性。結合提出的算法和轉矩補償等措施,已開發了集成于數字系統的電機車交流驅動系統,并通過了實踐驗證,表明基于本文方法的控制器具有較高的轉矩輸出,且調速過程平滑,電流正弦特性好,具有低壓時低速平滑運行的性能。具有較大的工程實用價值。
[1] FINLAYSON P T. Performance Comparison of Digital AC and DC Drives[C]. IEEE Conference of Industry Applications Society Annual Meeting. Washington DC. USA. October, 1992, 1: 365~369
[2] WAGNER R. AC Drive Technology For Locomotives[C]. ASME/IEEE Railroad Conference. USA. December, 1989, 1: 1~5
[3] EATON G M. The Development of The Electric Mine Locomotive[J]. Transactions of American Institute of Electrical Engineers, 1914, 33(1): 403~429
[4] DUFFY M C. Three-phase Motor in Railway Traction[J]. IEE Proceedings of Science Measurement and Technology, 1992, 139(6): 329~337
[5] ZHAO M H, SHEN M S, DIAO L J, et al. Design andRealization of 200KVA AC Mine Locomotive[C]. IEEE Conference on Vehicle Power and Propulsion. Harbin. China. September, 2008: 1~5
[6] 楊兆華,秦憶.異步電機矢量控制與轉差頻率控制的動態性能分析[J]. 中小型電機, 1998, 25(6): 1~4
[7] LU C G, DAWSON G E, EASTHAM T R, et al. Dynamic Performance of a Linear Induction Motor with Slip Frequency Control[C]. IEEE Canadian Conference on Electrical and Computer Engineering. Canada. September, 1993, 2: 1057~1060.
[8] 史琴. 礦用架線式機車變頻調速系統研究[D]. 西南交通大學, 2007
A Novel AC Drive System For Electric Mine Locomotive
Li Baosheng1Du Guiping2
(1. Yongji Xinshisu Electric Equipment Co., Ltd. 2.South China University of Technology)
The load and volatile electricity of mining locomotives is frequently changes with poor working conditions. A maximum-torque slip frequency control method with maximum torque output and overload torque compensation and bus voltage compensation measures is proposed. A DC550V/ 300KW experimental prototype is developed. The simulation and experiment tets show that the drive system in the process of start-up and speeding with heavy loads has stable torque control effect and good dynamic response. The traction performance and reliability of the system is improved.
Electric Mine Locomotive; Maximum Torque; Slip Frequency
李保生,男,1967年生,高級工程師,學士,研究方向:工礦電機車研究設計。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
意林原創版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
