基于DSP艦用全數字化控制逆變啟動電源設計
2010-07-03 06:37:38劉秀峰朝澤云
船電技術 2010年7期
關鍵詞:交流
劉秀峰 朝澤云
(1. 海軍駐七O一所軍事代表室,武漢 430064;2. 華中科技大學 電氣學院,武漢 430074)
1 引言
艦船電站發電機組的滑油系統配備有交流電動滑油泵為機組提供潤滑油,在機組備車、緊急停機或者艦電突然失電時,需要立即啟動交流電動滑油泵為機組的軸承等轉動部分建立油膜,避免軸承因過熱而損壞。因此,交流電動滑油泵是艦船重要的輔助裝置,一旦不能正常啟動,將影響整個艦船動力系統的工作[1,5,6,9]。由于通常采樣交流異步電動機拖動滑油泵工作,因此,根據啟動指令可靠快速的啟動滑油泵用交流電動機至關重要。
本文根據艦船實際需要,設計了一種基于DSP的全數字化控制逆變啟動電源,電路中的開關器件選用全控型器件 IGBT。該裝置具有直接啟動1.5 kW的380 V/50 Hz交流異步電動機和快速軟啟動3 kW的380 V/50 Hz交流異步電動機兩種啟動模式,并在交流市電和220 V蓄電池組供電切換時不間斷地為電動機供電。因此,逆變啟動電源需要具有能夠承受直接起動電動機時較大的起動電流的沖擊、實現快速軟起動3 kW交流電動機的高性能控制、在交直流供電的寬輸入電壓范圍內均能輸出380 V/50 Hz交流電、在交直流供電切換時能夠不間斷的輸出等功能。
2 系統結構及工作原理
圖1所示為逆變啟動電源原理框圖。裝置主電路采用了AC/DC/DC/AC的變換結構,其工作原理為當市電正常時,含十二相自耦變壓器的十二脈波不控整流電路將經 EMI濾波后的交流市電變換為400 V直流電,從而有效減少市電輸入級AC/DC變換產生的諧波含量,提高功率因數,降低輸入變壓器的容量。若市電發生故障,立即轉換為 220 V蓄電池組不間斷的為后級電路供電。由于在交直流兩種輸入電壓等級下逆變啟動電源均需輸出 380 V/50 Hz交流電,因此采用Boost升壓變換電路將市電或蓄電池提供的直流電升至580 V,為后級三相逆變電路提供穩定的直流母線電壓。通過控制三相逆變電路的工作方式,從而實現直接啟動電機和快速軟啟動電機的功能。
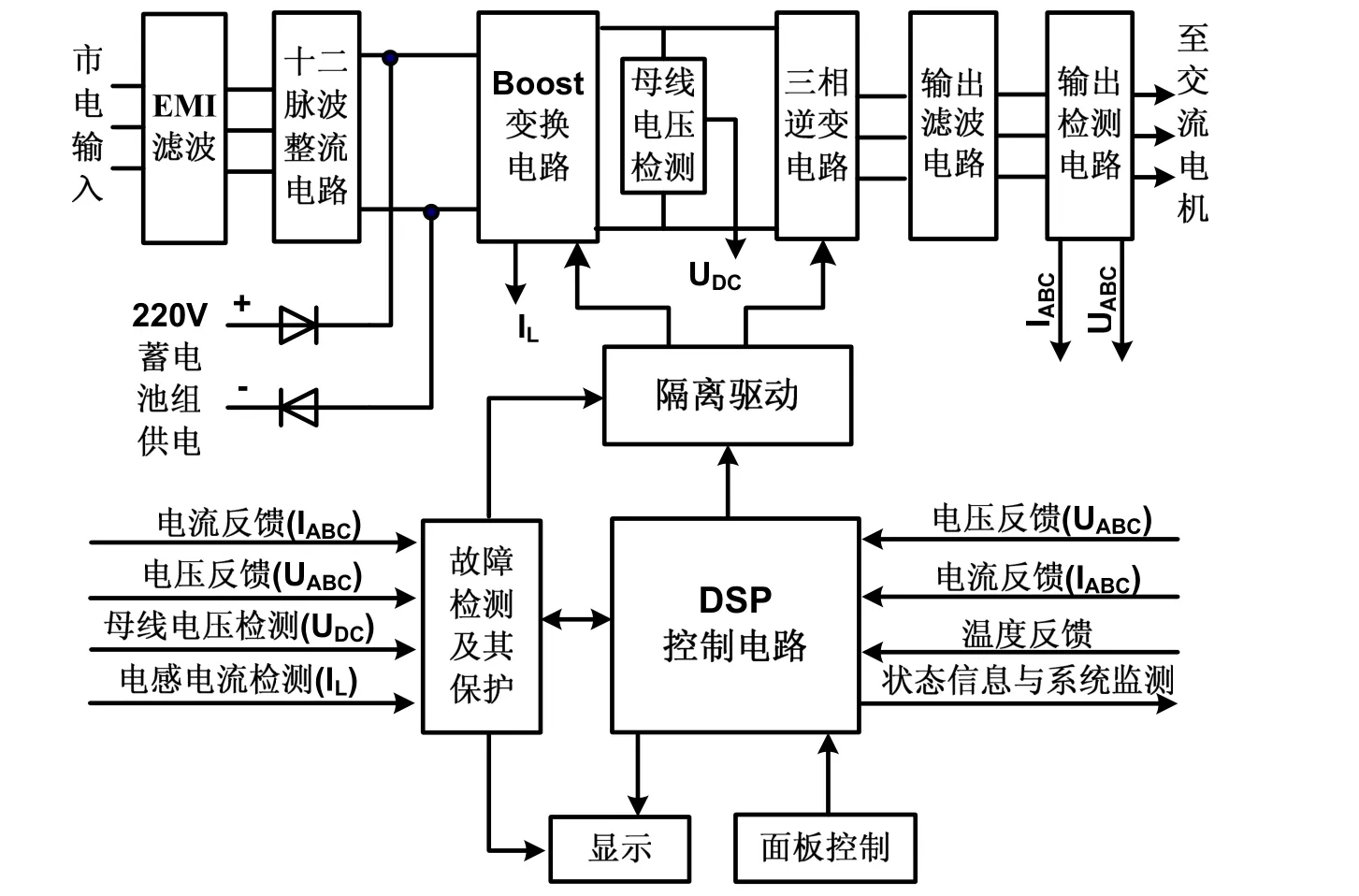
圖1 逆變啟動電源原理框圖
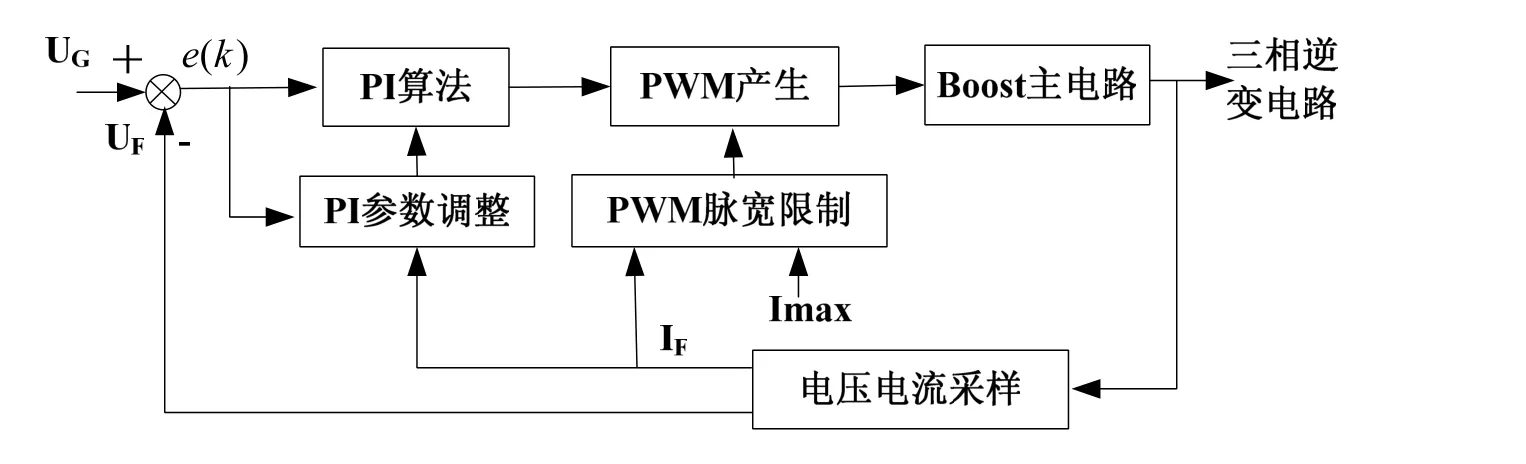
圖2 Boost電路控制原理框圖
控制系統采用將數字調節、硬件和軟件保護相結合的控制方案[2]。控制電路主要由美國TI公司生產的高速數字信號處理(DSP)芯片F240及其外圍電路組成。主要完成對電壓、電流反饋信號的采樣檢測處理、Boost變換、壓頻協調控制、優化的電壓空間矢量控制(SVPWM)、驅動信號產生、顯示數據發送、以及整機控制等功能。并實現對各種故障進行檢測和保護處理。同時發送裝置的狀態信息至電力系統監控中心進行通訊。顯示電路對逆變啟動電源的運行狀態進行實時顯示。面板控制電路用于接收操作人員發出的控制信號,經處理后送到中控芯片F240,實現對逆變啟動電源的控制。
3 Boost電路控制策略
Boost電路主要功能是在寬輸入電壓范圍和在電壓切換的動態過程中均能為三相逆變電路提供穩定可靠的直流電。
圖2所示為Boost電路控制原理框圖。由于PI調節器結構簡單,具有一定的魯棒性,在工程控制領域得以廣泛應用。因此,選用PI調節器控制Boost變換電路輸出電壓。傳統數字PI調節器的數學模型為[3]:
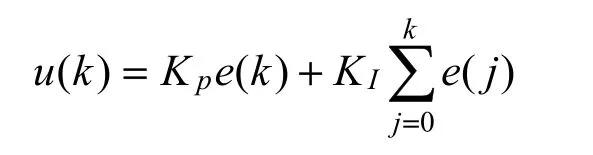
其增量表達式為:

其中 e ( k)、 e ( k-1)分別為第k和 k -1次采樣誤差值,Kp為比例系數,KI為積分系數。
由于Boost電路輸入電壓變化范圍大,特別是高低電壓切換的瞬間會引起輸出電壓 UF和升壓電感電流IF振蕩和尖峰,從而增加開關器件的電應力。尤其在高壓切低壓時會出現較高的電流尖峰,嚴重時甚至會損壞開關器件。
而傳統 PI調節器的參數在控制過程中為常數,難以滿足系統實際要求。因此,需根據實際實際經驗對PI參數進行相應的調整。在不同的電感電流IF和電壓誤差e下,PI參數的自調整需滿足如下的原則:
(1)當|e|較小時,為了減小穩態誤差,應取較小的 Kp和 KI,以便減小超調量和過渡時間,在保證系統穩定性的同時還具有較好的快速跟蹤性能。
(2)當|e|較大且 UF>UG時,低壓切高壓或電機停機時往往出現這種情況。應取較大的 Kp和KI,加快系統收斂速度,減少偏差和收斂時間,使瞬態響應加快。
(3)當|e|較大且 UF<UG、IF較小時,軟啟動電機時往往出現這種情況。為了加快系統收斂速度,應取較大的Kp和KI。
(4)當|e|較大且 UF<UG、IF較大時,高壓切低壓或直接啟動電機時往往出現這種情況。適當減小 Kp和 KI,避免系統收斂速度過快,從而減小電流尖峰。
如圖2所示,對Boost升壓電感電流IF和輸出電壓UF進行采樣,經過變參數的PI計算,調節驅動Boost升壓電路中開關管的驅動信號,從而調節輸出電壓保持恒定。
為了進一步有效減小電流尖峰對Boost電路的沖擊,當IF>Imax(Imax為允許的最大電流尖峰值)時,只允許Boost電路開關器件的PWM脈寬減小,不允許增加。
4 逆變啟動電路控制策略
逆變啟動電路需要具備兩種工作模式,一種是采用恒壓頻比控制的快速軟起動方式[8,10],快速起動3 kW電動機,從而在得到足夠大的啟動轉矩的前提下,還能有效減少啟動電流,穩態時為電機提供三相380 V/50 Hz的電壓;一種是逆變起動電源始終輸出三相380 V/50 Hz交流電,隨時準備直接起動1.5 kW電機,承受啟動電流的沖擊。
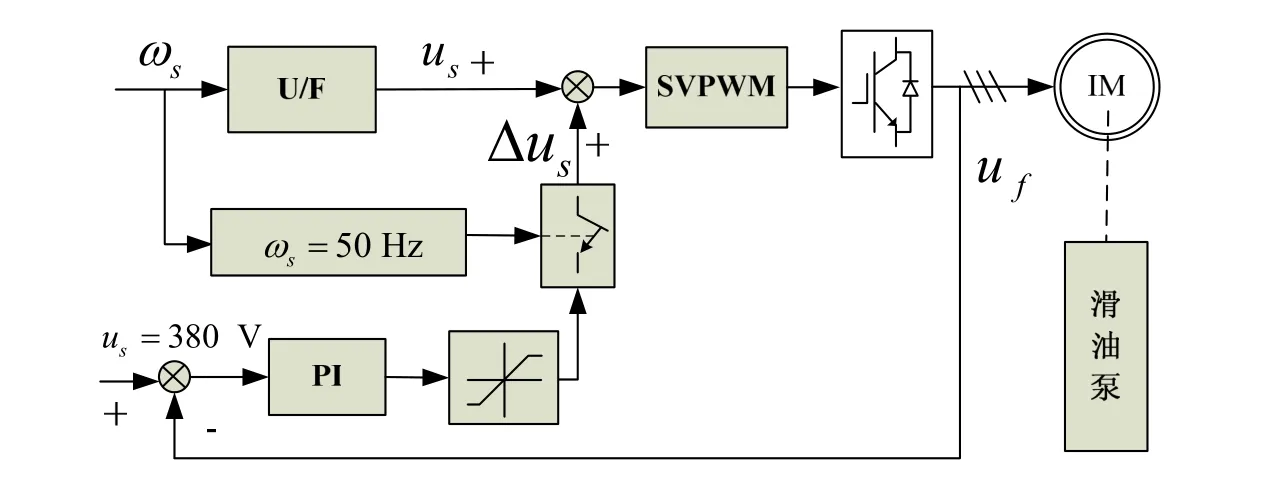
圖3 逆變啟動電路控制原理框圖
由于交流電機的負載均為滑油泵,對調速性能(特別是動態性能)要求不高,因此,采用轉速開環控制系統即可滿足系統要求。考慮到輸入電壓切換和直接啟停電機會引起逆變輸出電壓的波動,因此逆變啟動電源的控制策略為恒壓頻比控制結合輸出電壓反饋控制,原理框圖如圖3所示。
逆變啟動電源啟動時,其輸出電壓的頻率給定ωs和幅值給定us成比例的從0線性增大至50 Hz/380 V,隨后加入輸出電壓的數字閉環調節,從而有效抑制直接啟動電機時的瞬時電壓跌落以及補償開關器件管壓降和濾波電路壓降,保證輸出電壓的穩定性。此外,還采用數字化電壓空間矢量控制(SVPWM),在改善輸出電壓波形的同時有效降低開關管的開關損耗、并提高直流母線電壓的利用率[4,7]。
5 試驗結果
圖4所示為逆變啟動電源在不同工況下的實驗波形。圖4(a)和(b)分別為逆變啟動電源拖動1.5 kW電機,交流供電(整流后的直流電壓為400 V)切換至直流供電(220 V)時和直流切換至交流供電時Boost電路輸出電壓UF和電感電流IF波形;圖4(c)為逆變啟動電源軟啟動3 kW電機時的定子電流波形;圖4(d)為逆變啟動電源直接啟動1.5 kW電機時的輸出電壓uf和電機定子電流is波形。
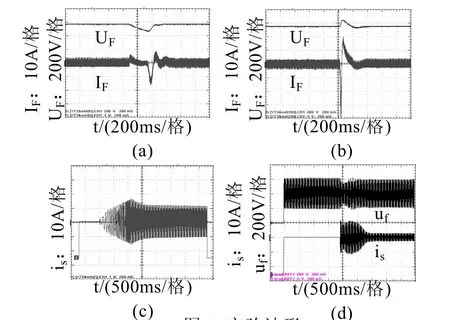
圖4 實驗波形
圖4(a)和(b)所示的實驗結果表明輸入在交流供電和直流供電之間切換時,Boost電路的輸出電壓能夠快速恢復穩態額定輸出,電壓波動范圍不大,升壓電感電流的峰值也被限制在安全范圍內。說明Boost電路具有較好的抗擾動能力。從而能夠為后續逆變電路提供可靠的直流母線電壓。圖 4(c)所示的實驗結果表明逆變啟動電源能夠實現快速軟啟動3 kW電機的功能,從圖中可以看出,啟動時間不大于2 s,且啟動時刻電機定子電流被有效限制在1.5倍額定電流以內。圖4(d)所示的實驗結果表明逆變啟動電源能夠承受直接啟動1.5 kW電機的沖擊,從圖中可以看出,逆變啟動電源的輸出電壓在直接啟動時瞬態壓降不大,且能快速恢復至額定輸出。
6 結論
根據艦船滑油泵配套交流電機不同的啟動方式要求,設計了一種基于DSP全數字化控制的逆變啟動電源裝置,該電源兩種工作模式:快速軟啟動3 kW電機和直接啟動1.5 kW電機,可以在交直流兩種供電電壓等級下安全可靠的工作。
實驗結果表明,該裝置在交直流兩種供電電壓切換時具有較好的動態性能,能夠實現在不大于2 s的時間內軟啟動3 kW電機,并能安全可靠的直接啟動1.5 kW電機。
[1]熊啟發. 軸系滑油泵控制技術研究[J]. 船電技術,2005, (5): 36-38.
[2]李永東. 交流電機數字控制系統. 北京: 機械工業出版社, 2003.
[3]Gene F.Franklin等. 動態系統的數字控制(Digital Control of Dynamic System)第3版. 北京: 清華大學出版社, 2001.
[4]陳堅. 電力電子學—電力電子變換和控制技術 第二版. 北京: 高等教育出版社, 2002.
[5]王慶紅. 艦船綜合電力系統總體概念研究的思考[J].中國艦船研究, 2006,(3): 25-29.
[6]Calfo. Generators for use in electric marine ship propulsion systems. Proceedings of the IEEE Power Engineering Society Transmission and Distribution Conference, 2002, V1, p254-259
[7]Kumar. Direct torque control of open-end winding induction motor drive using the concept of imaginary switching times for marine propulsion systems.Industrial Electronics Society. IECON 2005.31st Annual Conference of IEEE, 2005, p1504-1509.
[8]Kubota. PWM parallel resonant inverter designed for marine diesel emission control system. IEEE International Symposium on Industrial Electronics,2006, V2, P1341-1346.
[9]Apsley,J.M. Propulsion drive models for full electric marine propulsion systems. IEEE Electric Machines &Drives Conference, 2007, V1, P118 - 123.
[10]Leleu,E. Reduction of vibrations in an induction machine supplied by high power PWM inverter.European Conference on Power Electronics and Applications, 2005, P1-8.
猜你喜歡
科教新報(2022年12期)2022-05-23 06:34:16
四川勞動保障(2021年10期)2021-12-02 01:41:42
今日農業(2021年14期)2021-10-14 08:35:28
四川勞動保障(2021年4期)2021-07-22 08:08:54
四川勞動保障(2021年5期)2021-07-19 06:09:54
四川勞動保障(2021年3期)2021-06-09 07:09:22
四川勞動保障(2021年9期)2021-01-27 20:24:59
海峽姐妹(2020年8期)2020-08-25 09:30:18
遵義(2018年14期)2018-08-06 06:32:18
人民中國(日文版)(2015年10期)2015-04-16 03:53:58