基于成長型神經網絡以線段為基元的曲線重建
2010-07-07 06:51:50王世東張佑生王煥寶
圖學學報 2010年6期
王世東 , 張佑生, 王煥寶
(1. 中國科學技術大學火災科學國家重點實驗室,安徽 合肥 230026;2. 安徽建筑工業學院信息網絡中心,安徽 合肥 230022;3. 安徽三聯學院計算機科學與技術系,安徽 合肥 230601)
逆向工程的主要任務是由物理模型重建出幾何表示模型,通常包含4個步驟:數據采集、數據預處理、曲面擬合和CAD模型重建。其中,曲面擬合和CAD模型重建是逆向工程中最為重要的部分[1]。Alrashdan將逆向工程分成三個主要步驟:零件數字化,特征提取,CAD建模。其中,特征提取是通過點云分塊以及表面特征識別來完成的[2-3]。近年來,在逆向工程中,對特征提取問題的研究比較活躍。Géza Kós等對等半徑過渡特征曲面提取問題進行了研究[4]。Lu等對等/變半徑過渡曲面特征提取進行了研究[5]。文獻[4-5]只能針對比較規則簡單特征的提取。Ke等深入研究了點云切片算法和拉伸面特征的提取[6-7],能高效地構造點云有序組織形式和提取如拉伸面、旋轉面等復雜曲面特征。隨著神經網絡技術的廣泛應用,使用神經網絡實現特征提取逐漸成為一個熱門研究課題。Jun等研究了基于神經網絡的棱柱特征[8],如邊、孔等的識別。Xiao等提出使用正交神經網絡重建曲線[9],但當點云具有明顯角點和較多噪聲數據時,文獻[8-9]算法重建效果并不理想。
IVRISSIMTZIS等提出使用成長型神經網絡以三角面片為基元重建實體模型[10]。在此基礎上,本文提出基于成長型神經網絡以線段為基元的曲線重建算法。給定某一曲線的散亂點集和一個初始折線,使用成長型神經網絡優化折線上頂點的位置,使折線更好地逼近散亂點;持續分裂折線上活動性強的頂點和刪除活動性最弱的頂點,使頂點的分布更符合散亂點數據的概率分布。算法使折線上的頂點不斷增加,折線不斷成長,直至達到要求的重建效果。實驗結果表明,該算法的計算速度不受輸入數據量大小的影響,非常適合大規模散亂點集和含噪聲數據的學習,能夠取得良好的曲線重建效果。
1 曲線重建原理
1.1 成長型神經網絡
成長型神經網絡(Growing Cell Structures,下文簡稱 GCS網絡)屬于自組織特征映射神經網絡(Self-Organizing Feature Map,下文簡稱SOM網絡)。SOM網絡是芬蘭學者Kohonen在1980年根據生理學規律提出的。它是一種具有側向聯想能力的兩層網絡,能把輸入層含m維的向量特征映射到一維或二維拓撲空間中,如圖1所示,該網絡輸入為m維向量,輸出為一維拓撲神經元。SOM 引入變化鄰域概念來模擬生物神經網絡中的側抑制現象:生物神經元接受刺激并進行競爭產生獲勝神經元,該神經元和它鄰域的神經元得到加強,鄰域之外的神經元由于距離它較遠而受到抑制,這樣就可實現網絡的自組織特性。

圖1 一維輸出的SOM模型
GCS網絡是一種特殊的SOM網絡,它能夠增量生長。該網絡在學習輸入向量的過程中,根據神經元競爭獲勝次數的多少確定它們活動性的強弱,分裂活動性強的神經元,刪除活動性最弱的神經元,使網絡更好地體現輸入向量的內在特征。
1.2 曲線重建模型
基于 GCS網絡曲線重建模型的輸入向量為散亂點 X,輸出層 k個神經元為折線上的頂點,神經元的權向量Wj=[wj1,wj2, wj3]T, j=1,2,…, k為折線上頂點vj的坐標。在學習過程中,獲取與散亂點 X歐氏距離最小的折線頂點作為競爭獲勝頂點vw,將它和它的拓撲鄰域內的頂點向該散亂點移動。通過這種移動,使頂點的位置更逼近散亂點。該過程如圖2所示。
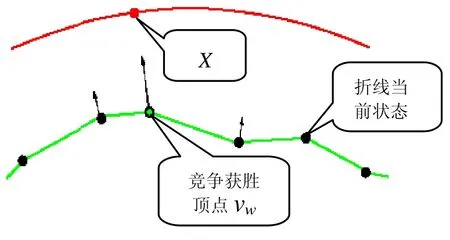
圖2 折線頂點的學習過程
折線上每一頂點有一計數器,其值的大小反映該頂點活動性的強弱。在學習每一散亂點時,更新所有頂點計數器值,使競爭獲勝頂點和它拓撲鄰域內的頂點計數器值增大,其它頂點計數器值減小。學習指定個數散亂點后,分裂活動性強的頂點,刪除活動性最弱的頂點。分裂頂點和刪除頂點過程如圖3所示。圖3(b)中,頂點E分裂后新增一頂點F,圖3(c)中,C點被刪除后,相鄰兩頂點相連形成一條新邊。模型通過對散亂點的學習,持續分裂活動性強的頂點和刪除活動性最弱的頂點,使折線上頂點個數不斷增長并愈來愈逼近實際曲線,從而實現曲線重建。

圖3 頂點的分裂和刪除
2 曲線重建算法
使用成長型神經網絡以線段為基元的曲線重建算法的基本思路是:從散亂點集中隨機取出一散亂點,在折線上找出與該點歐氏距離最小的頂點作為競爭獲勝頂點,將它向該散亂點移動一定距離;同時調整其拓撲鄰域內的各頂點的位置和所有頂點計數器值,在學習過程中,不斷分裂活動性強的頂點,刪除活動性最弱的頂點。直至滿足預定的結束條件。
如上所述,折線用L表示,折線上頂點v的集合用V表示,算法的步驟如下:
(1)取初始折線L,設散亂點集P中的點數為 N,令 n=0表示初始迭代次數,初始學習速率為η(n)<1。
(2)從P中隨機選取一散亂點X。
(3)在 V中找到與散亂點 X歐氏距離最小的頂點vw,如式(1)所示

(4)更新vw和它拓撲鄰域內頂點的位置。vw的新位置是它原來位置和采樣點X的位置的線性組合。如式(2)所示

vw拓撲鄰域內其他頂點位置的更新,如式(3)所示

式(3)中,λ(n)值如式(4)所示

式中 t為5~40較合適。
(5)更新學習速率η(n),如式(5)所示

(6)更新L中所有頂點的計數器值,競爭獲勝頂點的計數器值的更新按式(6)進行

其它頂點計數器值的更新按式(7)進行

式中 α為小于1的正數。
(7)上述(2)~(6)步迭代若干次,分裂具有最高計數器值的頂點,如圖3(b)所示。折線L的彈性能量[10]如式(8)所示

式中 Q為折線上邊的集合。新增頂點的位置應使折線的彈性能量最小化。通過式(8)可求出折線新增頂點的位置應為分裂頂點較長鄰接邊的1/2處為宜。以圖3(b)為例,則F點坐標如式(9)所示

令式Z(F)=DF2+EF2,即求頂點F相鄰邊長度的平方和。則頂點分裂后E點和F點計數器值如式(10)和式(11)所示

(8)上述(2)~(7)步迭代若干次,刪除L中計數器值最小的一頂點。刪除該頂點后,連接它拓撲鄰域的兩頂點,如圖3(c)所示,拓撲鄰域內兩頂點計數器值保持不變。
上述(2)~(8)的過程重復迭代,直至達到預設最大迭代次數為止。
3 實驗結果與分析
作者在Pentium 4-2.5GHz 處理器、1024M內存微機平臺上,用VC6.0和OpenGL實現了本算法,用它對某些曲線的散亂數據點集訓練并進行重建,取得良好效果。圖4為的散亂點集。
圖5為 y =s inx, x ∈ [ 0,2π]散亂點集的重建過程,共使用 8740個散亂點。圖5(a)為包含 2個頂點的初始折線。

圖4 y=sinx的散亂點集

圖5 sinx曲線重建過程
表1給出了y=sinx重建過程中的相關參數。

表1 y=sinx重建相關參數
圖6為古代一刀具輪廓的散亂點集。
圖6 刀具輪廓散亂點集
圖 7為刀具散亂點集的重建過程,共使用6480個散亂點。圖7 (a)為包含3個頂點的初始折線。

圖7 刀具輪廓重建過程
表2給出了刀具重建過程中的相關參數。
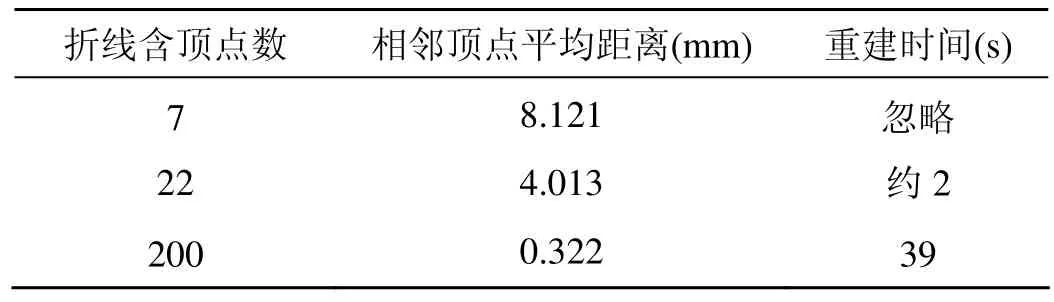
表2 刀具重建相關參數
從圖5和圖7可看出,重建結果幾乎不受噪聲數據的影響,有非常好的重建效果。從表1和表2中可看出,曲線重建后,頂點間距已達到常用顯示設備像素間距水平,圖5折線上頂點投影到原始曲線的平均距離誤差幾乎為零,頂點對原始曲線有很好的擬合;輸入數據量與重建時間近似成線性關系,重建過程所需時間短,重建速度較快。
4 結束語
本文提出基于成長型神經網絡以線段為基元的曲線重建算法,使用該算法優化折線上頂點的位置,使折線更好地逼近散亂點;持續分裂折線上活動性強的頂點和刪除活動性最弱的頂點,使頂點的分布更符合散亂點數據的概率分布。實驗結果表明該算法十分有效,且具有重建速度快,不受散亂點數據量大小影響的特點。
[1]Várady Tamás, Ralph R R, Jordan Coxf. Reverse engineering of geometric models-an introduction [J].Computer-Aided Design, 1997, 29(4): 255-268.
[2]Alrashdan Abdalla, Motavalli Saeid, Fallah Behrooz.Automatic segmentation of digitized data for reverse engineering applications [J]. IIE Transactions, 2000,32(1): 59-69.
[3]Huang Jianbing, Menq Chia-hsiang. Automatic data segmentation for geometric feature extraction from unorganized 3-D coordinate points [J]. IEEE Transactions on Robotics and Automation, 2001, 17(3):268-279.
[4]Géza Kós, Martin R R, Várady Tamás. Methods to recover constant radius rolling ball blends in reverse engineering [J]. Computer Aided Geometric Deign,2000, 17(2): 127-160.
[5]Lu Zhen, Ke Yinglin, Sun Qing, et al. Extraction of blend body feature in reverse engineering [J]. Chinese Journal of Mechanical Engineering, 2003, 16(3):248-251.
[6]Ke Yinglin, Wang qing. Research on point cloud slicing technique in reverse engineering [J]. Journal of Computer–Aided Design & Computer Graphics, 2005,17(8): 1798-1802.
[7]Ke Yinglin, Li An. Extruded surface extraction base on unorganized point cloud in reverse engineering [J].Journal of Computer–Aided Design & Computer Graphics, 2005, 17(6): 1329-1334.
[8]Jun Y, Raja V, Park S. Geometric feature recognition for reverse engineering using neural networks [J].International Journal of Advanced Manufacturing Technology, 2001, 17(6): 462-470.
[9]Xiao Shaoyong, Jin Shigang, Shi Wenjun. Curve reconstruction based on orthogonal neural network [J].Journal of Image and Graphics, 2000, 5(1): 62-65.
[10]IVRISSIMTZIS I P, JEONG W-K, SEIDEL H-P.Using growing cell structures for surface reconstruction [DB/OL]. http://csdl2.computer.org/comp/proceedings/smi/2003/1845/00/18450288.pdf,2005-10-7.
