滑模變結構控制在空間機器人姿態控制中的應用
2010-07-10 06:51:36徐向峰李曉茹郭曉君
制造業自動化 2010年6期
徐向峰,寧,李曉茹,郭曉君
(河南工業大學 機器人研究所,鄭州 450007)
0 引言
空間機器人在未來的空間活動中將扮演越來越重要的角色。機器人對衛星的在軌服務,如維修、更換星上設備、補給燃料等,將會延長衛星壽命、降低成本,這使得空間機器人技術成為最有吸引力的研究領域之一。機械臂的運動會改變基座的姿態,而姿態對于電源、通信等分系統來說,是非常重要的,因而基座一般都裝有飛輪、噴氣裝置等作為姿態控制裝置。通常情況下,安裝在空間機器人空間操作臂上的姿態角傳感器與施加控制力矩的執行器安裝在不同的位置(非并置情形),這使得它們之間有一定的柔性,會對控制系統的設計過程帶來一些困難,采用常規控制方法的性能指標惡劣,甚至無法使系統穩定[1,2]。滑模變結構控制作為一類特殊的非線性控制方法,在空間機器人姿態控制中有良好的適應性[4,5]。
實驗室搭建了以氣浮為重力補償方式的基于在軌服務的遙操作自由飛行機器人地面試驗平臺。該機器人實際上是一顆服務星,通過對分布在星體四周的8個氣動噴嘴進行伺服控制,來控制星體的前進、后退、左移、右移及繞Z軸的正、反轉。星體上設置有對接機構,可以實現與其它目標星的交會對接。星體上的6DOF機械臂可以實現典型的在軌服務和插拔動作。在機械臂的端部安裝有智能位姿傳感器,可以靈敏地實現對目標進行定位。本文采用滑模變結構控制方法對空間機器人的姿態進行控制。
1 滑模變結構控制的基本原理
滑模變結構控制是變結構控制系統的一種控制策略。這種控制策略與常規控制的根本區別在于控制的不連續性,即一種使系統“結構”隨時間變化的開關特性。該控制特性可以迫使系統在一定特性下沿規定的狀態軌跡作小幅度、高頻率的上下運動,即所謂的“滑動模態”或“滑模”運動。這種滑動模態是可以設計的,且與系統的參數及擾動無關。這樣,處于滑模運動的系統就具有很好的魯棒性。
滑模變結構控制的基本問題如下。
設有一控制系統:


2 空間機器人的數學模型
空間自由飛行機器人示意圖如圖1所示。
姿態傳感器安裝在空間機械臂末端,而施加控制力矩的執行器安裝在基座上。因科學實驗需要,連接傳感器儀表箱與空間機器人基座的結構不能是完全剛性的,由此可知該系統為一類帶有柔性的系統。圖示機械臂末端姿態角θ2是我們要控制的變量,θ1是機器人本體基座與空間臂的夾角,受施加的控制作用直接控制。假設基座與安裝在機械臂末端的智能傳感器通過轉矩常數為k,粘滯阻尼系數為b的彈簧連接,作用在機器人本體上的控制力矩為Tc,基座與傳感器儀表箱的轉動慣量分別記為J1,J2。

圖1 空間自由飛行機器人示意圖
運動方程如下:

由運動方程可求出從控制輸入Tc到輸出θ1的傳遞函數G(s),也可列寫出狀態空間方程。為了采用滑模控制,我們采用狀態空間方程形式。記狀態變量為并設Tc=u,則有如下狀態方程:

3 控制算法
我們的最終目標是找出控制量 的關于狀態變量的表達式,使得被控量 跟隨給定輸入 的變化并滿足一定的性能指標。
根據上述狀態方程,記誤差:

則可取切換函數:

其中α應為正值,以保證滑動模態是穩定的。在誤差狀態空間中,s表現為一條曲線或一個曲面。為保證狀態運動軌線于有限時間內到達切換面,取指數趨近律:

其中的符號函數sgn(s)可用飽和函數sat(s)來代替,以實現魯棒性更好的控制;ε是等速趨近項系數,λ是指數趨近項系數,為了保證快速趨近的同時削弱抖振,應在增大λ的同時減小ε。

控制系統的結構圖如圖2所示。

圖2 控制系統結構圖
4 仿真及結果
因本文主要是對控制算法進行原理性驗證,故選擇對象模型參數的標稱值,對模型進行設計,進而測試控制器的性能。取J1=1,J2=0.1,k=0.091,b=0.0036,要滿足期望的性能指標,這些值對應的裝置是最難控制的。我們取滑模控制器參數α=0.05,ε=0.05,λ=10,在給定斜坡(等速)輸入的情況下,對采用理想滑動模態與準滑動模態的控制器分別進行了實驗仿真,仿真結果如圖3、圖4所示。
圖3是理想滑動模態時的仿真結果,圖4是準滑動模態時的仿真結果。可見兩者均可達到不錯的跟蹤效果,控制器只是在初始時刻有較大的沖擊,此后維持在較小的范圍內進行切換。通過比較還可發現,基于準滑動模態的控制削弱了抖振,從而對干擾具有更好的魯棒性。

圖3 理想滑動模態時的仿真結果
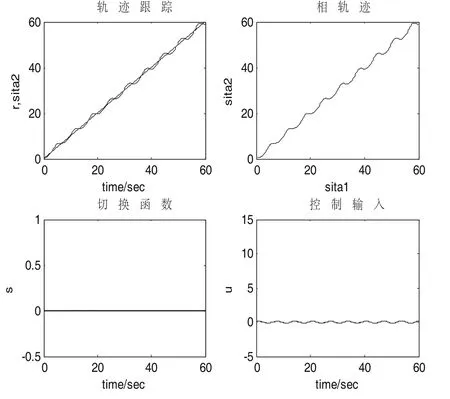
圖4 準滑動模態時的仿真結果
我們還對輸入為正弦波的情況進行了仿真,軌跡跟蹤如圖5所示。

圖5 參考輸入為正弦波時(Tr=60s)的跟蹤結果
可見滑模變結構控制對空間機械臂姿態的跟蹤與調整這類柔性系統能達到較好的控制效果。
[1] 寧祎,薛文奎,劉站立.遙操作機器人數據打包算法及藍牙通信[J].制造業自動化,2009,31(5):37-40.
[2] 徐文福,詹文發,梁斌,等.自由漂浮空間機器人系統基座姿態調整路徑規劃方法的研究[J].機器人,2006,28(3):291-296.
[3] 劉金琨,著.滑模變結構控制MATLAB仿真[M].北京:清華大學出版社,2005,22-64.
[4] WOOSOON YIM, MANOHARAN SELVARAJAN, WILLIAM R.WELLS.Sliding mode cooperative motion control of dual arm manipulators[J].Artif Life Robotics(1999)3,166-169.
[5] KEIGOWATANABE,YAMATO SHIRAISHI, SPYROS G.TZAFESTAS, etc.Feedback Control of an Omni-directional Autonomous Platform for Mobile Service Robots[J].Intelligent and Robotic Systems (1998)22,315-330.
[6] SPYROS TZAFESTAS, MARK RAIBERT,COSTAS TZAFESTAS.Robust Sliding-mode Control Applied to a 5-Link Biped Robot[J].Intelligent and Robotic Systems(1996)15,67-133.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
哲學評論(2021年2期)2021-08-22 01:53:34
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中華詩詞(2019年7期)2019-11-25 01:43:04
家庭影院技術(2017年9期)2017-09-26 03:41:45
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
現代企業(2015年9期)2015-02-28 18:56:50
上海電機學院學報(2015年4期)2015-02-28 14:30:00