多子陣對相干算法在高分辨率多波束測深系統中的應用研究
2010-08-06 13:14:38周天李珊李海森劉曉
通信學報 2010年8期
周天,李珊,李海森,劉曉
(1. 哈爾濱工程大學 水聲技術重點實驗室,黑龍江 哈爾濱 150001;2. 哈爾濱工程大學 水下智能機器人技術國防科技重點實驗室,黑龍江 哈爾濱 150001)
1 引言
多波束測深系統自20世紀50年代問世以來發展至今,已成為當前海洋資源調查必不可少的重要設備之一。依據工作原理的不同可以分為:傳統多波束測深系統和相干多波束測深系統。傳統多波束測深系統采用常規的FT(fourier transform)波束形成技術,通過增加接收基陣的孔徑(通常有上百通道)來提高海底回波方位估計的分辨率,此類系統的優點是在中央波束方向有很高的分辨率,但外側波束方向分辨率低;相干多波束測深系統利用各通道接收波形的相位差對接收回波的每個時間樣本進行到達方位估計,其通道數一般在2~6之間,此類系統在外側波束方向能夠得到高精度、高分辨率的方位估計,但其缺點是中央波束方位估計精度差。通過對比可以發現,兩者的優缺點有著很強的互補性[1~3]。
因此,目前的研究熱點集中在尋求將兩者優點結合的信號處理方法,特別是關注基于傳統多波束測深系統的多通道接收基陣,采用相干多波束測深系統中的基于相位信息的估計方法。Yang L在傳統的分裂子陣相關器的基礎上,提出了淺水應用場合下的多子陣相位檢測法[4];基于此算法,周天定量分析了多子陣劃分與信噪比的關系[5];Gerard基于相位估計誤差最小準則推導了子陣間隔和子陣長度對相位估計精度的影響,并提出了三子陣相位估計算法,具有很高的實用價值,此算法中涉及了對子陣列間的相位差進行解2π模糊[6];對此Sintes采用了經典的相位跟蹤解模糊方法,但這種算法對地形和噪聲太過于敏感,難以實際應用[7];Gerard利用 Vernier方法解決三子陣優化結構引入的相位模糊[6],但這種解相位模糊方法受噪聲影響大,穩定性差[8~10];Zhang Y L對Vernier方法進行了改進,進一步考慮了幅度和相位差曲線的連續性,提出了基于多元信息融合的相位差解模糊算法,提高了解相位模糊處理的準確性,但是這種方法涉及到幅度、相位差等判斷門限的主觀設置,并且涉及到區間內搜索,運算量大、不適合實時處理,限制了這種方法的實用性[11]。
本文針對相干算法中涉及的解相位模糊難點,提出了多子陣對相干算法,有效性強,適合多波束測深系統的實時實現,其性能在多次湖上實驗中得到了充分的驗證。
2 多子陣對相干算法
多波束測深系統中應用的各類相干算法都來自于傳統的分裂子陣相關器,本文首先從分裂子陣相關器出發,推導應用相干算法的最優子陣結構模型,針對相干算法中常常存在的相位模糊,理論推導了相位模糊與子陣結構的關系,在此基礎上推導提出多子陣對相干算法,用于高效準確地解決相干算法中存在的相位解2π模糊難點。
2.1 最優子陣結構模型
基陣模型如圖1所示,基陣與水平方位夾角為α,整個基陣長度為L個陣元。

圖1 基陣模型
設 θ0為 j號波束控制角,θ為海底回波到達角,d為陣元間距,子陣A、B長度為K個陣元,2個子陣聲中心間距為M個陣元,N為FFT波束數。由基陣理論知2個子陣在θ0方位的相位差表達式為

為了得到最小的測向誤差,對式(1)左右求導,得到

相干測量的相位差誤差可以表示為[12]

其中,SNR為陣列的輸出信噪比,不考慮陣元的指向性衰減,SNR與陣元輸入信噪比SNRi的關系為

將式(3)和式(4)代入式(2)得到:

為了得到δθ的最小值,對上式求導得到

當全陣輸出信噪比較高,即B很小時,得到子陣間距 Mopt≈2L/3,子陣長度 Kopt≈L/3。
將Mopt代入式(1),得到A、B 2個子陣相位差:

以聲吶系統中常采用的半波長布陣為例,式(8)中右邊的第一項簡化為,可見,如果要使得到的ΔφAB對應唯一θ角,必須要求。由于多波束測深系統采用的接收陣元數L很大,因此該條件不能滿足,要想利用式(8)確定海底回波到達方位θ,必須要對相位解2π模糊。
2.2 解相位差模糊
目前廣泛應用的相位解 2π模糊的方法為Vernier方法,其利用3個接收子陣組成2個相干子陣對來消除相位 2π模糊,其中每一個相干對的相位差測量可以表示為

mod(Δφ, 2π)表示含有相位模糊的相位差測量值,這樣,每一個相干對測量得到的相位差都對應了幾個波達方向 θ,但是實際中海底回波到達方向是確定的,2個子陣對觀察到的海底回波方向也應該是相同的。如果把2個相干子陣對計算得到的回波到達角度的可能方向畫出來,2個相互重合且屬于不同的相干子陣對的回波到達方向才對應于真實的相位差值,因此滿足式(10)的整數 n1、n2分別對應2個相干子陣對的相位模糊數。

其中,M1、M2分別為2個子陣對中的子陣間距。
實際中,2個子陣對獲取的到達角度不可能完全重合,在實際測量中要找的是在2個相干對中方位估計最接近的2個回波到達方向,使得式(11)中ε最小的n1和n2。

如果得到的ε大于Vernier有效門限,則很有可能對相位差的解模糊處理是錯誤的,因為此時由于噪聲的存在不能分辨出真實的和錯誤的回波到達方向。為了提高 Vernier有效門限,可以采用大的子陣間距,但會導致 Vernier效率的降低,因此Vernier方法的缺點在于對噪聲的敏感性,噪聲的存在會大大降低算法的性能。
Zhang Y L在此算法的基礎上,引入子陣波束輸出的幅度信息作為門限設置的依據,并且進一步考慮了相位差序列的連續性,其并不在每個樣本點上進行解模糊處理,而是對被“跳變點”劃分出來的整個連續區域做相位解模糊處理[11]。因為在連續區域中的模糊數相同,因此可以將式(11)變為


對相位解 2π模糊就轉變為在波束輸出時間序列區間[t1,t2]中尋找n1和n2使得E最小。
這種方法提高了解模糊的準確性,但是它并不是針對每個樣本點進行解模糊處理,而是需要在某個區間[t1,t2]內進行搜索,這種處理存在2個問題:①每個波束方向需要確定不同的[t1,t2];②不便于工程實現,因為為了提高多波束測深系統的測繪ping率,要求測深算法運算時間盡可能要少,對于相干算法,必須要求在采樣間隔內完成對當前樣本的測向處理,否則,在采樣結束后對全部樣本進行統一處理的運算量將大大加重對硬件處理平臺的壓力。
本文提出的多子陣對相干算法,是一種高效準確、低復雜度的相位解 2π模糊方法,可以滿足多波束測深系統實時實現的要求。
2.3 多子陣對相干算法
此算法解決相位模糊的出發點是首先推導出 2個子陣的相位差不存在 2π模糊的條件,然后在滿足此條件的前提下,通過子陣結構配置解決子陣相位差模糊問題。
根據式(1)及模型,假設j號波束的波束寬度為θR,假設此時不存在相位模糊,將分別代入式(1),根據形成非模糊區間的條件約束,得到:


由式(13)和式(14)可得

當子陣的孔徑K較大時:

將式(16)代入式(15)得到,在保證形成非模糊區間的條件下,子陣陣元數K與子陣等效中心間隔M、波束號j之間應該滿足的關系式為

在零號波束(j=0)、余弦加權(η=1.25)條件下,式(17)變成

由上面的分析可知,當2個子陣的間距滿足式(18)時,其相位差不存在相位模糊,而2.1節中推導出的最優子陣結構不滿足式(18),本文提出的多子陣對解模糊的原理是在最優子陣結構基礎上,利用2個子陣間的陣元構建額外的多個子陣,從而使得這些子陣結構滿足式(18)的要求。
對于本系統采用的80個陣元的均勻接收線陣,按照2.1節中結論,2個子陣A、B的最優長度為26個陣元,間距為54個陣元,根據式(18)可知,其必然存在相位模糊。如果利用這 2個子陣間的 54個陣元構建額外的5個子陣C1、C2、C3、C4、C5。即共計A、C1、C2、C3、C4、C5、B這7個子陣,子陣中心坐標分別為[13,22,31,40,49,58,67],每個子陣長度為26,相鄰子陣間距為9,滿足式(18)。由分析可知,雖然A、B間存在相位模糊,但是 7個子陣相互間不存在相位模糊。因此,為了得到待求的子陣A、B間無相位模糊的相位差值,可以利用 φAC1+ΔφC1C2+ΔφC2C3+ΔφC3C4+ΔφC4C5+ΔφC5B得到,與直接求φAB相比,回波樣本采樣間隔內所增加的運算量僅是5個復共軛相乘,比Vernier算法運算量更小、且更有效。
3 實驗數據處理
3.1 多子陣對相干算法解模糊性能驗證
實驗使用的數據為利用自研的多波束測深系統采集的松花湖湖底數據,實驗系統工作頻率為300kHz,采用“T”型組合聲學基陣,發射基陣為多元弧陣,接收陣為由80個陣元組成的均勻線陣,陣元間距為半波長。按照2.1節中推導的最優子陣結構,2個子陣間距為 54,子陣長度 K=26,采用2.3節中的新算法,將2個子陣間的54個陣元進一步細化分為5個子陣,則80個陣元共劃分成7個子陣,相鄰子陣間距M=9。
圖3給出的是利用文獻[6]中的Vernier解模糊方法,對 63°方向的波束輸出序列進行處理得到的結果,從圖中可以看到很多“斑點”,這些斑點不可以用于深度的估計,它的影響類似于嚴重的噪聲干擾,必須加以剔除;圖4中所示的即為利用多子陣對算法解模糊的結果,與圖3相比,解模糊效果明顯改善;圖5為在圖4的基礎上,進一步對子陣輸出序列進行濾波得到的結果,能夠得到清晰的相位差曲線,需要指出的是,濾波固然可以降低噪聲的影響,但也降低了距離分辨率。
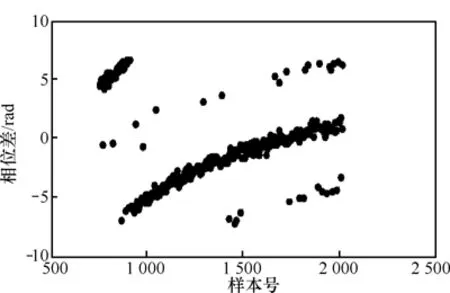
圖3 使用Vernier方法的解模糊結果
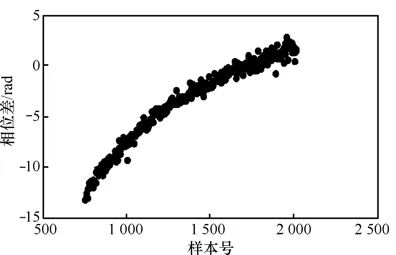
圖4 使用多子陣對方法的解模糊結果
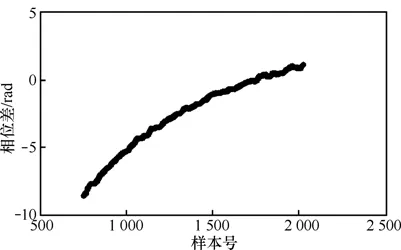
圖5 基于子陣濾波輸出的多子陣對方法的解模糊結果
3.2 多子陣對相干算法測向性能驗證
為了進一步驗證此算法的實用性能,本文在消聲水池進行了算法性能的測試實驗。實驗系統及多子陣結構同上。用于基陣測試的水池為六面消聲水池,受測基陣和發射換能器相距11m,均位于水下3m處,水聽器采用SMHP1997-07標準水聽器。被測基陣安裝在可旋轉的升降桿上,基陣輻射面面向測量水聽器。接收陣測量時,利用自動旋轉裝置使接收陣從-80°轉到80°,轉動速度為0.5°/s,在每個角度點上聲源發射脈沖長度0.5ms,采樣率40kHz,測量各個陣元輸出。測試系統如圖6所示。

圖6 水池實驗場景

圖7 利用FFT算法和多子陣對相干算法對水池實驗數據處理的結果
圖 7為實驗數據處理結果,圖 7(a)為利用 80通道原始數據的常規 FFT波束形成輸出,圖 7(b)為利用 80通道原始數據的多子陣對相干算法處理的結果。數據處理結果驗證了接收基陣可靠的束控性能以及多子陣對相干算法的有效性。對比圖7可以看出,由于FFT波束形成的方位估計性能取決于波束輸出的幅度特性,對于外側波束方向的回波,接收陣有效孔徑減小,導致波束變寬,方位估計精度下降;而多子陣對相干算法的方位估計性能依賴于波束輸出的相位特性,在中央波束方向和外側波束方向能同時獲得高精度方位估計特性,相比于傳統FFT波束形成算法優勢明顯。
3.3 湖底地形測量
為了考核算法的有效性,于2009年11月于吉林松花湖區進行了此多波束測深系統的航行實驗[13]。實驗湖區水深約56m,實驗系統及算法采用的多子陣結構同上。選取某ping數據文件進行處理,起始記錄時刻為第n0=3 000個采樣時刻,傳統的FFT波束形成算法與本文提出的多子陣對相干算法處理結果如圖8所示。

圖8 利用FFT算法和多子陣對相干算法對湖實驗數據處理的結果
圖8(a)為常規FFT波束形成輸出,可以看到,在外側波束方向波束變寬,導致分辨率變差。圖8(b)由于采用了多子陣對相干算法,不僅在中央波束方向而且在外側波束方向都能夠得到高分辨率的回波方位估計結果,反映水下地形的關系曲線清晰可見。從圖8(b)中可以清楚看出,采用此算法,可以實現水深60m下有效測繪條帶達到了6倍覆蓋,已經超過了和本系統工作頻率和基陣形式相同的國外同類系統中的典型代表EM3000S。
4 結束語
相干測深算法是提高多波束測深系統分辨率和覆蓋性能的重要保證,為了得到最小誤差的子陣相位差估計而采用的最優子陣結構會導致子陣間的相位差存在相位模糊,傳統 Vernier方法的性能受噪聲影響大,這嚴重影響了海底地形探測的有效性。為此本文提出了多子陣對相干算法,不僅高效解決了多波束相干測深算法中的相位解模糊難點,而且有效提高了海底地形估計的分辨率和覆蓋能力。克服了傳統多波束測深算法海底采樣不均勻的問題,具有很強的海底微地形探測能力。此算法已工程應用于國內首臺多波束測深系統,其性能已得到了多次湖上實驗的驗證。
[1] 譚良, 全小龍, 張黎明. 多波束測深系統及其在水下工程監測中的應用[J]. 全球定位系統, 2009, 33(1)∶ 38-42.TAN L, QUAN X L, ZHANG L M. Application of multi-beam sounding system in underwater surveying[J]. GNSS World of China, 2009,33(1)∶ 38-42.
[2] 么彬. 多子陣波束域高分辨水聲成像技術研究[D]. 哈爾濱工程大學, 2009.YAO B. Study on Multiple Sub-array Special Module Underwater Acoustic Imaging Technology[D]. Harbin Engineering University, 2009.
[3] 李成剛, 王偉偉, 閻軍. 傳統多波束系統與具有相干特點的多波束系統的研究[J]. 海洋測繪, 2007, 27(2)∶ 77-80.LI C G, WANG W W, YAN J. The study on traditional multibeam and interferometric multibeam[J]. Hydrographic Surveying and Charting.2007, 27(2)∶ 77-80.
[4] YANG L, TAXT T. Multbeam sonar bottom detection using multiple subarrays[A]. OCEANS’97[C]. Halifax, Canada, 1997. 932-938.
[5] 周天. 超寬覆蓋海底地形地貌高分辨探測技術研究[D]. 哈爾濱工程大學, 2005.ZHOU T. Research on Techniques of Super Wide Coverage Seafloor Bathymetry and Physiognomy Detection[D]. Harbin Engineering University, 2005.
[6] LLORT-PUJOL L, SINTES C, LURTONT X. A new approach for fast and high-resolution interferometric bathymetry[J]. IEEE Oceanic Engineering Society Newsletter, 2006, (11)∶ 12-18.
[7] SINTES C. Deconvolution Bathymétrique D'images Sonar Latéral Par Des Méthodes Intérférométriques et de Traitement de L'image[D].Universite de Rennes I, 2002.
[8] SINTES C, SOLAIMAN B. Interferometric sides scan sonar and data fusion [J]. Proceedings of SPIE, 2000, (4051)∶ 149-157.
[9] SINTES C, SOLAIMAN B. Strategies for unwrapping multisensors interferometric side scan sonar phase[A]. Ocean’s 2000. MTS/IEEE[C].USA, 2000.2059-2065.
[10] LLORT-PUJOL G, SINTES C, GUERIOT D. Analysis of vernier interferometers for sonar bathymetry[A]. OCEANS’08[C]. Quebec,2008.
[11] ZHANG Y L, LI H S. An improved method for unwrapping phase difference in bathymetry[A]. ICIA 2010[C]. Harbin, 2010.1071-1075.
[12] GLYYN J M. Acoustic Calibration and Bathymetric Processing with Klein5410 Sidescan Sonar[D]. New Hampshire University, Burnaby,B S E E, UK, 2007.
[13] 李海森, 陳寶偉, 么彬等. 多子陣高分辨海底地形探測算法及其FPGA和DSP陣列實現[J]. 儀器儀表學報, 2010, 28(4)∶281-286.LI H S, CHEN B W, YAO B, et al. Implementation of high resolution sea bottom terrain detection method based on FPGA and DSP array[J]. Chinese Journal of Scientific Instrument, 2010, 31(2): 281-286.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2021年4期)2021-04-20 14:06:36
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
計算機應用(2021年1期)2021-01-21 03:22:38
北京測繪(2020年12期)2020-12-29 01:33:58
家庭影院技術(2017年9期)2017-09-26 03:41:45
意林原創版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34