機(jī)器人輔助導(dǎo)管插入系統(tǒng)技術(shù)進(jìn)展
2010-08-08 09:25:56作者陳大國(guó)沈杰言勇華
中國(guó)醫(yī)療器械雜志 2010年1期
【作者】陳大國(guó),沈杰 ,言勇華
1 上海交通大學(xué)機(jī)器人研究所,上海,200240
2 解放軍第四五五醫(yī)院,上海,200052
近年來,微創(chuàng)手術(shù)(Minimally Invasive Surgery,MIS)由于其手術(shù)操作相對(duì)簡(jiǎn)單、傷口小、患者痛苦小、術(shù)后恢復(fù)快和風(fēng)險(xiǎn)較小的特點(diǎn)迅速為醫(yī)生、病人所接受。微創(chuàng)手術(shù)有一種重要的應(yīng)用,用針頭在皮膚(一般為股動(dòng)脈處)上穿刺后,將導(dǎo)絲插入血管,在圖像引導(dǎo)下進(jìn)給到指定位置,再將導(dǎo)管沿導(dǎo)絲送入,接著抽出導(dǎo)絲。這個(gè)過程稱為導(dǎo)管插入(簡(jiǎn)稱插管),其中最重要的步驟為將導(dǎo)絲在圖像引導(dǎo)下進(jìn)給到指定位置。插管操作有多種用途,如肝癌的微創(chuàng)療法——經(jīng)導(dǎo)管肝動(dòng)脈化療栓塞(Transcatheter Arterial ChemoEmbolization , TACE),是將導(dǎo)管送至肝臟癌變部位的血管附近,再將化療藥物或栓塞劑通過導(dǎo)管內(nèi)腔送到病灶附近。目前實(shí)施方法是醫(yī)生在圖像引導(dǎo)下手動(dòng)操作,但這種操作主要有以下幾個(gè)不足:
(1) 插管操作過程中需要X射線成像,使術(shù)者受到輻射的危害;
(2) 插管操作過程中沒有導(dǎo)管三維位置信息,僅憑術(shù)者的經(jīng)驗(yàn)和解剖學(xué)知識(shí),操作是試探性的,使手術(shù)時(shí)間較長(zhǎng),輻射累積傷害較大;
(3) 人工插管操作準(zhǔn)確度低,有時(shí)很難或無(wú)法將導(dǎo)管精確定位到病灶,使得治療效果欠佳。
機(jī)器人輔助插管系統(tǒng)能較好地解決這些問題。利用遠(yuǎn)程操作技術(shù)并加入力檢測(cè)與力反饋裝置,可實(shí)現(xiàn)術(shù)者在手術(shù)室外或更遠(yuǎn)距離對(duì)手術(shù)室內(nèi)的執(zhí)行裝置進(jìn)行控制,并仍能感受力的信息。同時(shí),也能縮短手術(shù)時(shí)間,減少術(shù)者和病人的輻射劑量。利用虛擬/增強(qiáng)現(xiàn)實(shí)技術(shù)將術(shù)前的病灶三維模型和術(shù)中的二維圖像進(jìn)行圖像匹配、融合,提供三維圖像導(dǎo)航信息給術(shù)者,使其操作更加精確。此外,利用機(jī)械執(zhí)行裝置的高精度復(fù)現(xiàn)術(shù)者的操作,將導(dǎo)管準(zhǔn)確送到病灶處,可改善療效。機(jī)器人輔助插管系統(tǒng)根據(jù)導(dǎo)管的不同而有較大的差別,分為主動(dòng)和被動(dòng)兩類。主動(dòng)導(dǎo)管頭部有附加自由度,且一般直徑較大而中空,可輸送液體,多采用復(fù)雜的控制系統(tǒng)[1,2]。被動(dòng)導(dǎo)管由導(dǎo)絲和套管組成,僅能從末端控制。當(dāng)前國(guó)內(nèi)醫(yī)院進(jìn)行此類手術(shù)時(shí)多采用被動(dòng)導(dǎo)管,故本文僅討論后者。
目前對(duì)于機(jī)器人輔助插管系統(tǒng)尚無(wú)普遍認(rèn)可的定義,但至少包含以下內(nèi)容:一個(gè)主從控制的或自動(dòng)控制的機(jī)電裝置,在兩維或三維圖像的引導(dǎo)下,以較高精度將導(dǎo)管送至指定的位置,在這過程中能實(shí)時(shí)反饋導(dǎo)管的位置以及導(dǎo)管所受的力。
1 系統(tǒng)組成
根據(jù)前面的定義,一個(gè)典型的機(jī)器人輔助插管系統(tǒng)結(jié)構(gòu)如圖1 所示。

圖1 系統(tǒng)結(jié)構(gòu)圖Fig.1 System structure
它至少應(yīng)當(dāng)包括以下部分:(1)導(dǎo)絲進(jìn)給、檢測(cè)裝置;(2)力反饋裝置;(3)成像設(shè)備及圖像處理裝置;(4)監(jiān)控及顯示設(shè)備;(5)計(jì)算機(jī)。
系統(tǒng)分為放射室內(nèi)和放射室外兩部分,使用網(wǎng)絡(luò)進(jìn)行通信。放射室內(nèi)布置了成像、監(jiān)控設(shè)備及導(dǎo)絲進(jìn)給和檢測(cè)裝置,從控計(jì)算機(jī)起總體控制作用;放射室外布置了顯示設(shè)備和導(dǎo)絲檢測(cè)裝置,主控計(jì)算機(jī)進(jìn)行統(tǒng)籌。前面三部分將在后面詳細(xì)討論,監(jiān)控設(shè)備用于醫(yī)生在手術(shù)過程中保證患者安全,包括視頻監(jiān)控、記錄心跳、血壓等參數(shù)的裝置;計(jì)算機(jī)用于處理檢測(cè)數(shù)據(jù),進(jìn)行圖像處理,控制進(jìn)給裝置等。
2 監(jiān)控的檢測(cè)與顯示
2.1 導(dǎo)絲進(jìn)給、檢測(cè)
導(dǎo)絲要能在分支復(fù)雜、形狀多變的血管里運(yùn)動(dòng),至少需要兩個(gè)自由度:沿血管進(jìn)退以進(jìn)入、退出血管,繞自身旋轉(zhuǎn)以在分支處找準(zhǔn)要進(jìn)入的血管。
導(dǎo)絲的頭部是彎曲的,進(jìn)入分支血管的方式,是轉(zhuǎn)動(dòng)導(dǎo)絲使導(dǎo)絲頭部彎曲方向?qū)?zhǔn)目標(biāo)血管,再將導(dǎo)絲往前送,這兩個(gè)自由度通常由同一個(gè)裝置實(shí)現(xiàn)。進(jìn)退運(yùn)動(dòng)的實(shí)現(xiàn)的基本方式是利用摩擦力,用電機(jī)驅(qū)動(dòng)滾輪使導(dǎo)絲運(yùn)動(dòng)。Ikuta等人提出了多種驅(qū)動(dòng)方式,如摩擦輪驅(qū)動(dòng)[3],差動(dòng)齒輪驅(qū)動(dòng)[4]和無(wú)干涉球型驅(qū)動(dòng)[5]等。不過,它們與所有利用滾動(dòng)摩擦的機(jī)構(gòu)一樣,有一個(gè)共同的缺點(diǎn):當(dāng)接觸表面摩擦系數(shù)下降時(shí),會(huì)產(chǎn)生打滑。F.Arai與T.Fukuda等人提出了一種稱為線性步進(jìn)機(jī)構(gòu)(Linear Stepping Mechanism)的裝置,它的原理與自動(dòng)鉛筆相似[6]。這種機(jī)構(gòu)利用鎖死來改善摩擦力的影響,但也有其固有的缺陷,它推進(jìn)導(dǎo)絲的速度較慢,并且步進(jìn)的距離是固定的,不能準(zhǔn)確到達(dá)指定位置。旋轉(zhuǎn)運(yùn)動(dòng)一般由將實(shí)現(xiàn)進(jìn)退運(yùn)動(dòng)的機(jī)構(gòu)進(jìn)行繞其軸旋轉(zhuǎn)實(shí)現(xiàn),或者反過來將實(shí)現(xiàn)旋轉(zhuǎn)運(yùn)動(dòng)的機(jī)構(gòu)整體做成可沿軸線運(yùn)動(dòng)的形式。這兩種結(jié)構(gòu)體積較大,在實(shí)際應(yīng)用中價(jià)值不大。
實(shí)現(xiàn)遠(yuǎn)程操作需要檢測(cè)主動(dòng)端(術(shù)者操作部分)的導(dǎo)絲的旋轉(zhuǎn)、進(jìn)退量。在從動(dòng)端(病人受控部分)進(jìn)行閉環(huán)控制時(shí),也需要檢測(cè)實(shí)際的運(yùn)動(dòng)量。當(dāng)前用來檢測(cè)導(dǎo)絲運(yùn)動(dòng)量的手段主要為編碼器。Y.Thakur等人提出的系統(tǒng)中使用編碼器來檢測(cè)線性和旋轉(zhuǎn)兩個(gè)運(yùn)動(dòng)量,最小分辨率分別為0.02 mm和0.18°[7]。在后續(xù)研究中,將會(huì)使用光學(xué)傳感器作為檢測(cè)運(yùn)動(dòng)量的手段,可大大減小檢測(cè)機(jī)構(gòu)的體積和復(fù)雜程度。
2.2 力反饋
由于血管形狀的復(fù)雜性和血液的粘性等原因,導(dǎo)絲在血管內(nèi)運(yùn)動(dòng)時(shí)會(huì)受到阻力。這些阻力主要有1)導(dǎo)絲頭部與血管壁的接觸力,2)導(dǎo)絲在整個(gè)長(zhǎng)度上與血管壁的摩擦力, 3)血液對(duì)導(dǎo)絲的粘性阻力等。檢測(cè)這些力并提供給術(shù)者,不僅可以幫助操作者判斷導(dǎo)絲的位置和狀態(tài),決定下一步是前進(jìn)、后退還是旋轉(zhuǎn),更重要的是限制了力的大小,保護(hù)病人不受傷害。
前面提到的三種力中,其中力3)相對(duì)前兩種力很小,此處不作討論。而當(dāng)力1)出現(xiàn)時(shí),導(dǎo)絲頭部與血管相抵觸使其暫時(shí)卡住,當(dāng)阻力突然消失時(shí)會(huì)造成導(dǎo)絲前沖,有可能損傷血管。力2)是正常情況下導(dǎo)絲前進(jìn)需要克服的阻力。力1)和力2)都通過導(dǎo)絲傳遞到操作者的手上,操作者無(wú)法區(qū)分它們,因此有必要分別檢測(cè)這兩種力。關(guān)于觸覺傳感器的布置形式,有附加在導(dǎo)絲上和安裝在夾持導(dǎo)絲的手腕上兩種。J.Jayender 等人曾報(bào)道過,在他們使用的7自由度東芝機(jī)器人的手腕上安裝6維力/力矩傳感器,檢測(cè)插絲過程中力和力矩[8]。
安裝在導(dǎo)絲上的力傳感器,根據(jù)所應(yīng)用的物理原理,大致分為壓電效應(yīng)[9]、應(yīng)力應(yīng)變[10]和光學(xué)原理[11]三種。壓電效應(yīng)中使用最多的材料是聚偏氟乙烯(PVDF),基本原理是PVDF受到載荷時(shí)(壓力),薄膜的兩側(cè)積聚電荷形成電壓,電壓與壓力大小有關(guān)。在制作完成傳感器并標(biāo)定后,測(cè)量的電壓即可知壓力[12]。導(dǎo)絲上的傳感器,包括頭部的傳感器和導(dǎo)絲壁的感器,檢測(cè)力時(shí)都不需要準(zhǔn)確獲得力的方向。這一方面是因?yàn)楦鶕?jù)經(jīng)驗(yàn),在插絲操作中導(dǎo)絲的運(yùn)動(dòng)并不能準(zhǔn)確地響應(yīng)醫(yī)生的操作,只要知道阻力的存在及其大小,就能判斷下一步該執(zhí)行什么樣的操作(旋轉(zhuǎn),進(jìn)退);另一方面,由于血管的復(fù)雜性和柔性,要測(cè)量力的方向也比較復(fù)雜。
2.3 成像及圖像處理
傳統(tǒng)的開放式手術(shù)操作者可看到手術(shù)區(qū)域,可做到相當(dāng)程度的手眼協(xié)調(diào)。而在微創(chuàng)手術(shù)中,操作者通常看不到手術(shù)區(qū)域或視野比較狹窄,因此必須借助于其他方法。目前,常用醫(yī)學(xué)成像方法用作圖像導(dǎo)航手段,如超聲波、X射線(包括計(jì)算機(jī)斷層掃描CT,數(shù)字減影血管造影DSA等)及MRI等[13]。
超聲波(Ultrasound)成像是靠人體組織彈性和密度的不同對(duì)超聲波的反射也不同原理成像的,對(duì)病人的損傷小,比較安全,常用于心臟、腹部成像[14,15]。X射線成像的原理是人體不同組織對(duì)X射線的吸收不同,常用于檢測(cè)腫瘤。數(shù)字減影血管造影(Digital Subtraction Angiography, DSA)是往目標(biāo)區(qū)域的血管里注入造影劑,將造影前后的圖像相減,可得到清晰的二維血管圖像,是經(jīng)血管栓塞、化療的重要手段[16];磁共振成像(Magnetic Resonance Imaging, MRI)是通過探測(cè)人體組織的原子與電磁波的共振幅度獲得組織的信息的,常用于檢查腦腫瘤、關(guān)節(jié)病變等。磁共振成像用于微創(chuàng)介入手術(shù)具有安全和病人損傷小等特點(diǎn),不過由于鐵磁性物體會(huì)對(duì)成像效果有很大影響,微創(chuàng)介入器械必須由非鐵磁性材料制成[17]。在實(shí)際的微創(chuàng)介入手術(shù)中,經(jīng)常使用多種成像手段,用信息融合加以處理以獲得更好的效果,如R.Fahrig等人報(bào)道用X射線/MR混合成像,作為介入手術(shù)導(dǎo)航方法[18]。
在微創(chuàng)介入手術(shù)中,為獲得導(dǎo)管/導(dǎo)絲頭部的環(huán)境情況,發(fā)展了多種特殊的圖像導(dǎo)航方法。例如,在治療心房顫動(dòng)消融(Atrial Fibrillation Ablation)中,M.P.Fronheiser等人提出了在電消融導(dǎo)管頭頂部及四周安裝小型超聲波傳送陣列,探測(cè)心房?jī)?nèi)部空間[19];在C.Pappone等人報(bào)道了Stereotaxis公司的Niobe系統(tǒng),采用磁場(chǎng)來控制導(dǎo)管頭,因而也可以得到導(dǎo)管頭的準(zhǔn)確位置信息。不過,他們?nèi)孕枰褂肅T或MRI技術(shù)獲得體內(nèi)組織的信息,才能獲得導(dǎo)管相對(duì)人體的位置[20]。
在微創(chuàng)手術(shù)的圖像導(dǎo)航中,如果使用普通的CT、DSA或超聲波成像,只能得到治療區(qū)域的二維圖像,深度信息的丟失會(huì)降低手術(shù)的準(zhǔn)確率,延長(zhǎng)手術(shù)時(shí)間。目前的解決方案大致有兩種。一種是使用可獲得三維圖像的成像技術(shù),如三維超聲波成像,雖然實(shí)時(shí)性較好,但其空間分辨率低,不適合用于精細(xì)操作[21];又如螺旋CT和MRI,雖然能得到高質(zhì)量的三維圖像,但數(shù)據(jù)處理花費(fèi)的時(shí)間較長(zhǎng),不適合實(shí)時(shí)性要求較高的圖像導(dǎo)航。另一種方法是術(shù)前通過螺旋CT或MRI,獲得手術(shù)區(qū)域的高分辨率的三維圖像,又在手術(shù)過程中,通過DSA或X射線機(jī)獲得實(shí)時(shí)高分辨率二維圖像,然后通過圖像配準(zhǔn)等方法得到手術(shù)器械在體內(nèi)的位置。這種方法涉及二、三維圖像匹配、圖像融合及虛擬現(xiàn)實(shí)技術(shù),是當(dāng)前研究的熱點(diǎn)[22,23]。
3 插管系統(tǒng)介紹
目前已比較成熟的插管系統(tǒng)多為主動(dòng)導(dǎo)管系統(tǒng)。Hansen Medical公司的產(chǎn)品Sensei控制臺(tái)和Artisan插管裝置,醫(yī)生操作布置在手術(shù)室外,其控制臺(tái)上有三維操縱桿,控制臺(tái)的屏幕可顯示實(shí)時(shí)的X射線和超聲波圖像,并通過3D可視化模塊Cohesion實(shí)時(shí)顯示心臟及導(dǎo)管的三維圖像[24];插管裝置在手術(shù)室內(nèi),控制SMA主動(dòng)導(dǎo)管執(zhí)行動(dòng)作。Stereotaxis公司的Niobe系統(tǒng),由布置在手術(shù)臺(tái)兩側(cè)的位于保護(hù)罩內(nèi)的可俯仰、旋轉(zhuǎn)運(yùn)動(dòng)的強(qiáng)永磁體,在手術(shù)室外的遠(yuǎn)程控制、顯示臺(tái),以及布置在手術(shù)臺(tái)一側(cè)的插管機(jī)構(gòu)組成。它的頭部帶有磁環(huán)的專用導(dǎo)管,通過旋轉(zhuǎn)、俯仰永磁體來控制方向,由導(dǎo)輪控制進(jìn)或退[25]。國(guó)內(nèi)哈爾濱工業(yè)大學(xué)對(duì)主動(dòng)導(dǎo)管使用的形狀記憶合金(SMA)[26]和機(jī)器人輔助穿刺等[27],也有研究的報(bào)道。此外,清華大學(xué)、北京航空航天大學(xué)等高校在微創(chuàng)機(jī)器人上也有相關(guān)的研究。
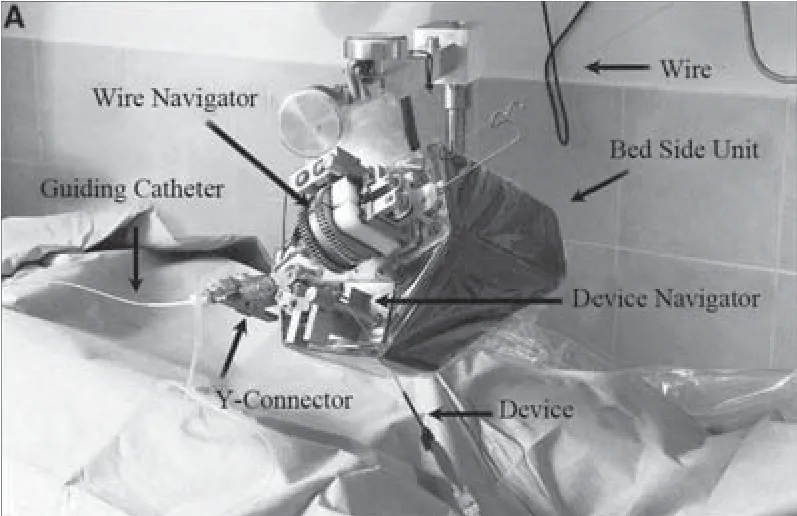
圖2 插管機(jī)構(gòu)Fig.2 Device for insert catheter
被動(dòng)導(dǎo)管系統(tǒng)相對(duì)主動(dòng)導(dǎo)管系統(tǒng)來說比較少,發(fā)展也欠成熟。Corindus公司的CorPath系統(tǒng),由安裝在手術(shù)臺(tái)旁邊的插絲機(jī)構(gòu)(圖2)和布置在與手術(shù)臺(tái)不遠(yuǎn)處的有較好防護(hù)的控制臺(tái)組成。它的插絲機(jī)構(gòu)在控制臺(tái)上的操縱桿的控制下,實(shí)現(xiàn)與人工插管類似的前進(jìn)、后退或旋轉(zhuǎn)操作。使用操縱桿可實(shí)現(xiàn)連續(xù)運(yùn)動(dòng),在距離目標(biāo)點(diǎn)較遠(yuǎn)時(shí)使用;點(diǎn)按控制臺(tái)的觸摸屏上的按鈕,可實(shí)現(xiàn)微小的步進(jìn)運(yùn)動(dòng),用于目標(biāo)點(diǎn)附近的微調(diào)[28]。
Y.Thakur等人提出了一種與現(xiàn)有的插管手術(shù)類似的系統(tǒng)[7]、[29]。該系統(tǒng)有一個(gè)稱為導(dǎo)管傳感器(Catheter Sensor)的裝置,用來檢測(cè)術(shù)者對(duì)導(dǎo)管的旋轉(zhuǎn)、進(jìn)退操作;另外有一個(gè)導(dǎo)管操縱(Catheter Manipulator)的裝置,可復(fù)現(xiàn)導(dǎo)管傳感器檢測(cè)到的動(dòng)作(圖3)。這個(gè)系統(tǒng)的特點(diǎn)是不需要特殊的導(dǎo)管,操作方式與當(dāng)前常用的手動(dòng)操作導(dǎo)管相似,可以充分利用介入醫(yī)生的熟練技術(shù)。該裝置也可以作為訓(xùn)練工具培養(yǎng)新醫(yī)生。當(dāng)前國(guó)內(nèi)進(jìn)行此類介入手術(shù)的醫(yī)院多采用此種方法,不過該系統(tǒng)并沒有提供力反饋。Y.Thakur認(rèn)為導(dǎo)管的柔性變形會(huì)將力儲(chǔ)存起來,不會(huì)造成破壞性影響。但是在不知道導(dǎo)管的彎曲情況下能感受到阻力,會(huì)讓介入醫(yī)生操作更加謹(jǐn)慎,如放慢速度,操作導(dǎo)管旋轉(zhuǎn)、后退等。這些都是當(dāng)前醫(yī)生所具有的經(jīng)驗(yàn),不應(yīng)當(dāng)拋棄。

圖3 導(dǎo)管傳感器與導(dǎo)管操縱器Fig.3 Catheter Sensor and Catheter Manipulator
4 結(jié)論
微創(chuàng)介入手術(shù)由于其多種優(yōu)點(diǎn)迅速被人們所接受,但手動(dòng)進(jìn)行介入手術(shù)有效率低、對(duì)操作者有損傷等缺點(diǎn),而且隨著手術(shù)例數(shù)的增多,介入操作者的輻射累積損傷較為嚴(yán)重,限制了微創(chuàng)介入手術(shù)的發(fā)展。利用機(jī)器人輔助插管,在解決一系列關(guān)鍵技術(shù)后,可以提高手術(shù)效率,降低輻射損傷,具有光明的前景。
機(jī)器人輔助插管系統(tǒng)的發(fā)展方向,主要有以下幾個(gè)方面:
(1) 三維圖像導(dǎo)航軟件。提供基于虛擬/增強(qiáng)現(xiàn)實(shí)的術(shù)前規(guī)劃、術(shù)中導(dǎo)航的圖形用戶接口(GUI),實(shí)現(xiàn)多種成像設(shè)備的支持,使得醫(yī)院在使用機(jī)器人輔助插管裝置時(shí)可利用已有的設(shè)備。
(2) 插管機(jī)構(gòu)的小型化、模塊化。應(yīng)當(dāng)巧妙設(shè)計(jì)機(jī)械、電氣結(jié)構(gòu),使得裝置便于安裝、拆卸以及消毒等。
(3) 插管的智能化、自動(dòng)化、遠(yuǎn)程化。解決手術(shù)的自動(dòng)規(guī)劃、過程控制的時(shí)延以及設(shè)備的可靠性的關(guān)鍵技術(shù),提高治療效率。遠(yuǎn)程醫(yī)療和實(shí)現(xiàn)插管自動(dòng)化將使醫(yī)療資源讓更多的人受惠。
[1]Saliba W, Cummings JE, Oh S,et al.Novel robotic catheter remote control system: feasibility and safety of transseptal puncture and endocardial catheter navigation[J].J Cardiovasc Electr, 2006, 17(10):1102-1105.
[2]Faddis MN, Chen J, Osborn J,et al.Magnetic guidance system for cardiac electrophysiology-a prospective trial of safety and efficacy in humans[J].Journel of the American College of Cardiology, 2003, 42(11): 1952-1958.
[3]Ernst S, Ouyang F, Linder C,et al.Initial experience with remote catheter ablation using a novel magnetic navigation system-magnetic remotecatheter ablation[J].Circulation, 2004(109): 1472-1475.
[4]Koji I, Masaki T, Takao N.Virtual endoscope system with force sensation[J].Proceedings of the 1999 IEEE International Conference on Robotics & Automation, 1999, 3: 1716-1721.
[5]WANG J, GUO S, KONDO H,et al.A novel catheter operating syatem with force feedback for medical applications[J].International Journal of Information Acquisition, 2008, 5(1): 83-92.
[6]`Arai F, Fuji R, Fukuda T.New catheter driving method using linear stepping mechanism for iIntravascular neurosurgery[A].Proceedings of the 2002 IEEE lntematinal Conference on Robotics & Automation, 2002, 3:2944-2949.
[7]Yogesh T, Jason H.C, David W.H,et al.A device for real-time measurement of catheter-motion and input to a catheter navigation system[J].Progress in biomedical optics and imaging , 2007, 6509(part 1).
[8]Jayender J, Azizian M, Patel RV.autonomous image-guided robot-assisted active catheter insertion[J].IEEE transactions onrobotics, 2008, 24(4):858-871.
[9]Javad D, Sedaghatia R, H.S,et al.Modeling and testing of an endoscopic piezoelectric-based tactile sensor[J].Mechatronics , 2007, 17(8): 462-467.
[10]Mami T, Takashi I, Yoshikatsu T,et al.Development of a 3D tactile sensor[J].J Mater Process Tech, 2007, 181: 286-290.
[11]Jan P, Joeri C, Dominiek R,et al.A micro optical force sensor for force feedback during minimally invasive robotic surgery[J].Sensors and Actuators, 2004, 115: 447-455.
[12]Weixing F, Shuxiang G, Changmin C,et al.Realization of a catheter driving mechanism with micro tactile sensor for intravascular neurosurgery[A].Proceedings of the 2006 IEEE International Conference on Robotics and Biomimetics[C], 2006: 1628-1633.
[13]Lei X, Brian T, Eduard S,et al.Overview of image-guided radiation therapy[J].Medical Dosimetry, 2006, 31(2): 91-112.
[14]Wang AS, Narayan G, Kao D,et al.An Evaluation of using real-time volumetric display of 3D ultrasound data for intracardiac Catheter Manipulation Tasks[A].Volume Graphics 2005 Eurographics/IEEE VGTC Workshop Proceedings[C], 2005: 41-45.
[15]Chris J.D.Thermal ablation and high-temperature thermal therapy-Overview of technology and clinical implementation[J].International journal of hyperthermia , 2005, 21(8): 745-753.
[16]Milickovic NB, Baltas D, Giannouli S,et al.Automatic reconstruction of catheters in CT based bracytherapy treatment Planning[A].Proceedings of the 22nd Annual EMBS International Conference[C], 2000: 2870-2874.
[17]Michael B, Frank K.W.MR-guided intravascular interventions- Techniques and applications[J].J Magn Reson Imaging, 2008, 27(2): 326-338.
[18]Rebecca F, Arundhuti G, Prasheel L,et al.Design, performance, and applications of a hybrid X-ray MR system for interventional guidance[J].Proceedings of the IEEE , 2008, 96(3): 468-480.
[19]Matthew P.F, Edward D.L, Salim F.I,et al.Real-time, 3-D ultrasound with multiple transducer arrays[J].IEEE Transactions on Ultrasonics,Ferroelectrics, and Frequency Control, 2006, 53(1): 100-105.
[20]Carlo P, Giuseppe A, Filippo G,et al.Robotic and magnetic navigation for atrial fibrillation ablation[J].How and why[J], 2007: 885-894.
[21]Lin Y, Bogdan G, Yefeng Z,et al.3D ultrasound tracking of the left ventricle using one-step forward prediction and data fusion of collaborative trackers[J].26th IEEE Conference on Computer Vision and Pattern Recognition, 2008.
[22]H.M.C, Albert C.S.C, Simon C.H.Y,et al.2D-3D vascular registration between digital subtraction angiographic (DSA) and magnetic resonance angiographic (MRA) images[A].2nd IEEE International Symposium on Biomedical Imaging: Macro to Nano[C], 2004, 1: 708-711.
[23]Hasegawa S, Wang H, Wei D.An efficient algorithm for real-time catheter Tip detection in a virtual reality of electrophysiology study[A].Proceedings of The Sixth IEEE International Conference on Computer and Information Technology[C], 2006: 126-131.
[24]Reddy VY, Petr N, Zachary J.M.View-synchronized robotic imageguided therapy for atrial fibrillation ablation; experimental validation and clinical feasibility[J].Circulation, 2007, 115(21): 2714-2754.
[25]Mark S.P, Jeroen S, Carlos Van M,et al.Magnetic Navigation in Percutaneous Coronary Intervention[J].Journal of Interventional Cardiology, 2006, 19(6): 558-565.
[26]付宜利, 李顯凌, 梁兆光.基于形狀記憶合金的自主導(dǎo)管導(dǎo)向機(jī)器人設(shè)計(jì)[J].機(jī)械工程學(xué)報(bào), 2008, 44(9): 76-82.
[27]修雯雯,杜志江.機(jī)器人輔助經(jīng)皮穿刺手術(shù)系統(tǒng)發(fā)展概況[J].中國(guó)醫(yī)療器械雜志, 2007, 31(5): 362-366.
[28]Rafael B, Luis G, Dan D,et al.Remote-Control Percutaneous coronary interventions: concept, validation, and first-in-humans pilot clinical Trial[J].J Am Coll Cardiol, 2006, 47(2): 296-300.
[29]Yogesh T, Jeffrey S.B, David W.H,et al.Design and performance evaluation of a remote catheter navigation system[J].Ieee T Bio-Med Eng,2009,56(7):1901-1908
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
昆明醫(yī)科大學(xué)學(xué)報(bào)(2021年2期)2021-03-29 07:42:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
河北畫報(bào)(2020年10期)2020-11-26 07:20:50
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
中國(guó)衛(wèi)生標(biāo)準(zhǔn)管理(2015年3期)2016-01-14 03:41:47
西南軍醫(yī)(2014年5期)2014-04-25 07:42:48