一種應用于曝光機的新型z向系統方案及實驗研究
2010-08-08 10:23:24李霖
電子工業專用設備 2010年1期
李霖
(中國電子科技集團公司第四十五研究所,北京東燕郊 065201)
接觸接近式光刻設備是半導體生產及實驗制造中的關鍵設備之一,主要用于功率電子器件、傳感器、光電子器件、微波電路、MEMS(微電子機械系統)及其它新型電子元器件的單、雙面對準及曝光工藝,有著較大的市場影響力。隨著LED芯片市場的快速增長,LED芯片生產商對曝光設備提出了更高的要求。由于LED生產廠家及其它設備用戶對曝光機生產效率、操作方便性、設備可靠性等需求,迫切需要我們在z向系統等關鍵技術方面有所突破、能適應LED芯片生產工藝的曝光機。
1 z向運動系統
1.1 原理
z向系統就是驅動承片臺作z向運動的機構,z向運動包括基片接觸掩模版的向上運動和基片與掩模微分離的向下運動。基片到位后,接觸式曝光機首先驅動基片作z向運動,使基片與掩模接觸并提供一定的找平力,楔形誤差補償機構在找平力的作用下完成基片對掩模的找平,即基片與掩模的均勻接觸,找平后,通過某種方式(比如真空鎖)保持找平效果,然后基片與掩模作微小的z向分離運動,分離后,基片上表面與掩模下表面仍保持平行,基片相對掩模作xy平面的對準運動而不損害掩模表面以及基片表面的光刻膠,對準后,再次使基片與掩模接觸,最后進行曝光。
1.2 新型z向系統設計方案
z向系統是工作臺的一部分,新型的z向系統方案包括驅動機構、導向機構、鎖緊機構等功能機構以及氣動控制、執行等輔助裝置。其示意圖如圖1所示。z向采用氣缸驅動,靠調節氣缸的壓力來保證所需的接觸力,微分離也采用氣動驅動,z向抬升和微分離均由空氣軸承導向。其楔形誤差補償機構采用氣浮球碗的方式,能夠在較小的接觸力下完成找平,降低了碎片的可能性,提高成品率。

圖1 z向系統示意圖
z向系統主要實現以下三種功能:
功能一:支持承片臺。承片臺背面固聯一個球段,它與中央活塞頂部的錐形球座配合,此配合使得找平時承片臺可以掩模版為基準在各個方向“擺動”,完成找平,找平后用真空鎖住配合。對于脆性基片,在球面配合之間導入壓縮空氣,使得找平過程低摩擦,阻力小。
功能二:z向抬升運動,使得基片到達曝光位置。z向運動系統的核心是一個長配合的空氣軸承,使得抬升運動沒有側移、無需潤滑、免維護。提供抬升運動驅動力的是一個特殊的氣缸。它完全密封,幾乎沒有空氣泄漏;極低摩擦,對微小的壓力變化能作出靈敏的反應;可以0.01 MPa的微壓操作,即使在低速狀態下,亦能平順操作無爬行;不需要在空氣配管上設置潤滑器,非常適合接觸力的調整。避免了使用普通氣缸的低速爬行現象,基片與掩模接觸無沖擊。z向系統零件選用輕質材料,使得氣缸的驅動壓力很低,并且可精確控制,對掩模和基片的損傷很小。
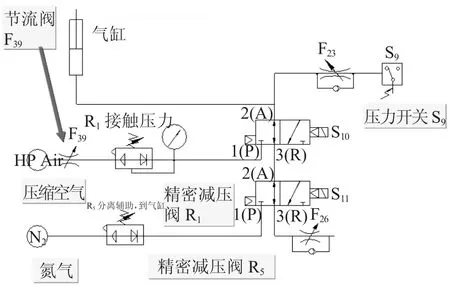
圖2 接觸力氣動控制原理
圖2為接觸力氣動控制原理圖。節流閥F39控制z軸上升的速度。活塞上升太快,基片對掩模造成沖擊,發出撞擊聲,且容易碎片。壓力開關S9控制找平力。當氣缸中的壓力達到S9的設定值時,找平完成。改變壓力開關S9的設定壓力值,就可調整找平力。精密減壓閥R5用來設定微分離時氣缸中的壓力。R1壓力設定為0.1 MPa。R5壓力設定為0.05 MPa~0.1 MPa。關鍵壓力參數調整其減壓閥帶有表頭。
功能三:微分離。基片和掩模第一次接觸以后,運動的空氣軸承套被鎖緊在分離套上,短暫的延時后分離環充氣膨脹,推動分離套/空氣軸承套的聯合體向下作微小的運動,基片與掩模微分離。調整氣囊的充氣壓力可精確調整微分離量,精密減壓閥保證充氣壓力的重復精度,從而保證微分離量的重復精度。微分離也通過空氣軸承導向。分離套通過兩層彈性膜片懸掛在殼體上,在z向上具有柔性,而在x,y方向則有很大的剛性。這種設計使得漂移運動降到最小程度。
1.3 實驗研究
先期制作完成了一些實驗件對z向運動系統的部分功能進行了實驗驗證,實驗氣路如圖3所示。其中 R1、R4、R5均采用精密減壓閥。R1:z向抬升時氣缸的壓力。R5:微分離時氣缸中的壓力。R4:分離氣囊的充氣壓力。R1影響z向抬升的速度和找平力;R5對分離間隙起輔助影響;R4對分離間隙起主要作用。
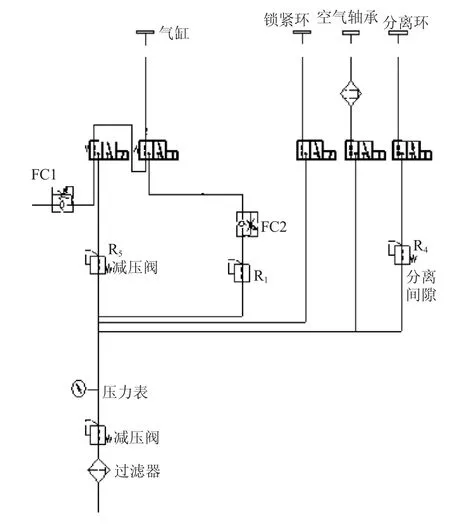
圖3 z向系統實驗氣路控制圖
1.3.1 空氣軸承
空氣軸承按雙列環形布置節流孔。采用帶氣腔的噴嘴節流形式。
實驗過程中,空氣軸承供氣后,空氣軸承套與導向桿配合面之間形成氣膜,空氣軸承套在徑向的偏移受阻,用手不能晃動,證明它具有較高的徑向剛度,氣缸運行非常平穩輕柔。空氣軸承的耗氣量較小,將手放在試驗裝置上方才能微微感覺其排氣。
1.3.2 氣缸
實驗數據見表1。
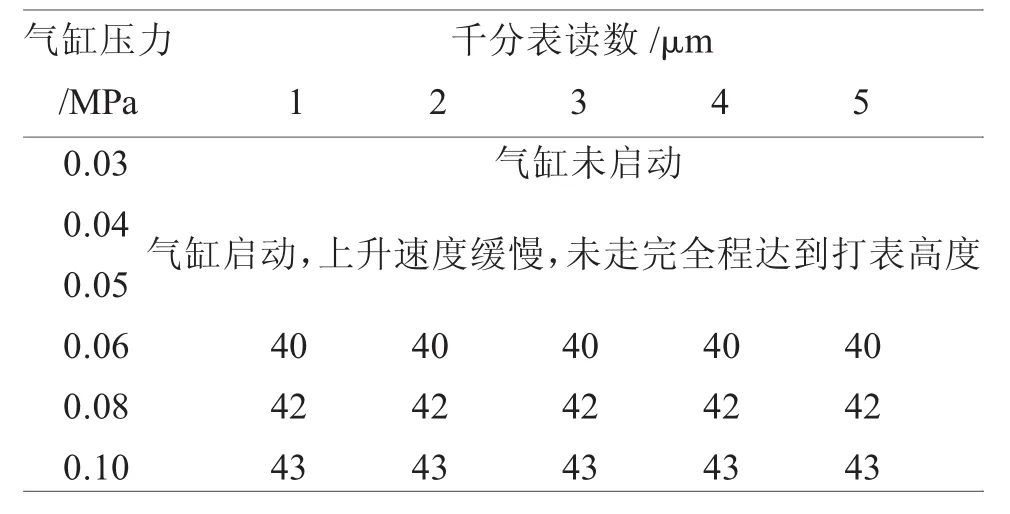
表1 氣缸實驗數據
從表1中可以看出,氣缸的啟動壓力為0.04 MPa,在0.04 MPa下,其速度非常慢,低于10 mm/s,氣缸低速運行平穩,無爬行現象,但未走完全程。通過精密減壓閥逐漸增大氣缸壓力到0.1 MPa,可以看到氣缸的速度逐漸增大,氣缸行程也有較高的一致性。這說明氣缸在沒有密封摩擦的情況下,對壓力的變化非常敏感,因此找平力的調整可以做到方便、精密。去掉氣缸中的壓力,氣缸能很快落下,氣缸抬升過程中無轉動。
1.3.3 鎖緊裝置的性能
(1)不加負載:氣缸供氣壓力為0.1 MPa,鎖緊壓力為0.4 MPa,在氣缸上升過程中的任意位置按下鎖緊按鈕,氣缸停住1~2 s后繼續向上竄動,未達到鎖緊要求;氣缸供氣壓力為0.1 MPa,鎖緊壓力增大到0.5 MPa,重復上述步驟可以鎖緊;
(2)加650 g負載:氣缸供氣壓力為0.1 MPa,鎖緊壓力為0.4 MPa,在氣缸上升過程中的任意位置按下鎖緊按鈕,氣缸停止1~2 s后繼續向上竄動,未達到鎖緊要求;氣缸供氣壓力為0.1 MPa,鎖緊壓力增大到 0.5 MPa,重復上述步驟可以鎖緊。
1.3.4 微分離量調整和重復精度
負載650 g,空氣軸承供氣壓力0.5 MPa,滾動隔膜氣缸壓力0.1 MPa,鎖緊環供氣壓力0.5 MPa,每次在氣缸上升到估計的工作行程時鎖緊,測相隔120°的3個點的分離間隙。表2給出了其中一組實驗數據,從所得數據中可以看出,不同的分離壓力對應不同的分離間隙,在相同的分離壓力下分離間隙的波動也較小,具有較好的一致性,可以通過控制分離壓力得到不同的微分離距離。
通過以上幾方面的實驗,說明z向運動系統在原理上是正確的,在正式實施之前還有以下幾點需要考慮:
(1)在相同分離壓力下分離間隙有小的波動,可能是因為鎖緊力不夠即鎖緊間隙過大造成,可以在設計時減小鎖緊間隙;
(2)用于鎖緊及分離的鎖緊環、鎖緊片和膜片的材料選擇需進一步考慮。
2 結束語
設計了一種曝光機的新型z向系統方案,該方案采用氣動驅動的方式,通過控制氣體壓力來調整接觸力,對工藝參數進行優化;通過空氣軸承導向減少漂移,提高套刻精度,完成找平、微分離的自動控制,提高曝光機的工作效率、操作方便性、工藝適應性以及設備的可靠性。并通過實驗對其部分功能進行了驗證,為進一步實用化奠定了基礎。

表2 微分離實驗數據
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
發明與創新(2016年38期)2016-08-22 03:02:52
