全站儀三角高程測(cè)量?jī)煞N方法精度淺析
2010-08-21 03:06:58王百勇
山西建筑 2010年19期
王百勇
在工程測(cè)量中,高程控制是各種工程高程施工放樣的基礎(chǔ)。傳統(tǒng)的高程控制的測(cè)量方法是幾何水準(zhǔn)測(cè)量和三角高程測(cè)量。水準(zhǔn)測(cè)量直接測(cè)得地面兩點(diǎn)間高差,操作簡(jiǎn)單,測(cè)量精度也高,但受地形的限制;三角高程測(cè)量是一種間接測(cè)得兩點(diǎn)高程的方法,它不受地形條件的限制,且測(cè)量速度快,但精度較低。因此,有研究者提出一種全站儀三角高程測(cè)量的新方法。即將全站儀安置在兩測(cè)點(diǎn)中間,在不量取儀器高和棱鏡高的情況下,利用三角高程的原理測(cè)得未知點(diǎn)的高程,然而此方法誤差隨觀測(cè)距離和豎直角的增大而增加。上述三種方法雖各有優(yōu)缺點(diǎn),但適用于不同的范圍,下面從三角高程測(cè)量原理出發(fā),利用誤差傳播定律,對(duì)這兩種三角高程測(cè)定方法進(jìn)行精度分析。
1 全站儀安置于已知點(diǎn)的三角高程中誤差
1.1 觀測(cè)原理
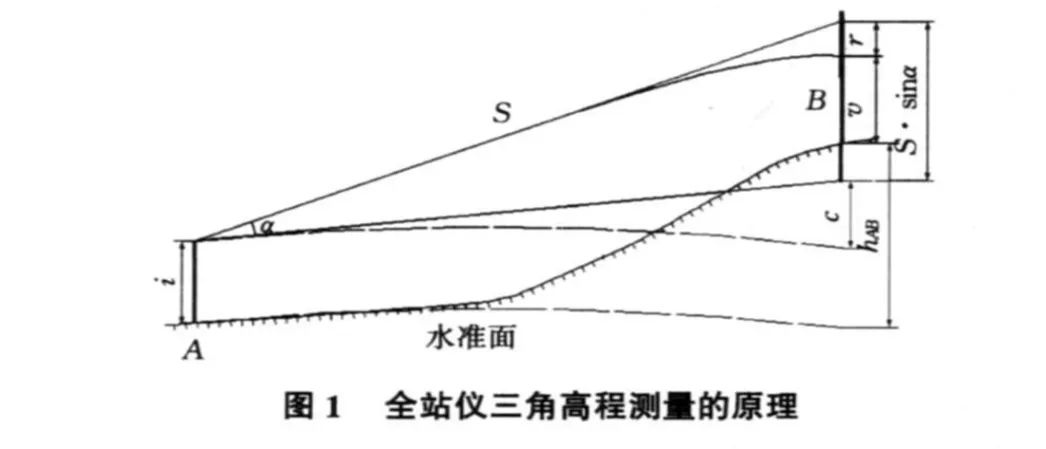
全站儀單向三角高程測(cè)量如圖1所示,其中A為高程已知點(diǎn),B為待測(cè)高程點(diǎn),將全站儀安置于A點(diǎn),量取儀高為i,將棱鏡置于B點(diǎn),量得棱鏡高為v。由圖1可得A,B兩點(diǎn)間的高差計(jì)算公式為:

其中,hAB為A,B兩點(diǎn)的高差;S為斜距;α為豎直角;c為地球曲率改正數(shù);r為大氣折光系數(shù)改正數(shù)。
在用全站儀進(jìn)行三角高程測(cè)量時(shí),一般進(jìn)行對(duì)向觀測(cè),即往返測(cè)。如果在相同的觀測(cè)條件下進(jìn)行,則可認(rèn)為大氣折光系數(shù)對(duì)于反向觀測(cè)基本相同,即K往≈K返。所以可得出對(duì)向觀測(cè)時(shí)三角高程計(jì)算高差的基本公式為:

1.2 精度分析

其中,mh為往返測(cè)量的平均高差中誤差;ms往,ms返為往返距離中誤差;mα往,mα返為往返豎直角中誤差;mi往,mi返,mv往,mv返為往返儀器高和棱鏡高中誤差。
又由于儀器和觀測(cè)條件相同,所以可以認(rèn)為:ms往=ms返=ms,mα往=mα返=mα,再令S往=S返=S,mi往=mi返=mv往=mv返=m,同時(shí)α往,α返相差不大,也可以認(rèn)為近似相等,即 α往=α返=α,則平均高差的中誤差關(guān)系式可簡(jiǎn)化為:

2 全站儀安置于兩點(diǎn)之間的三角高程中誤差
2.1 觀測(cè)原理
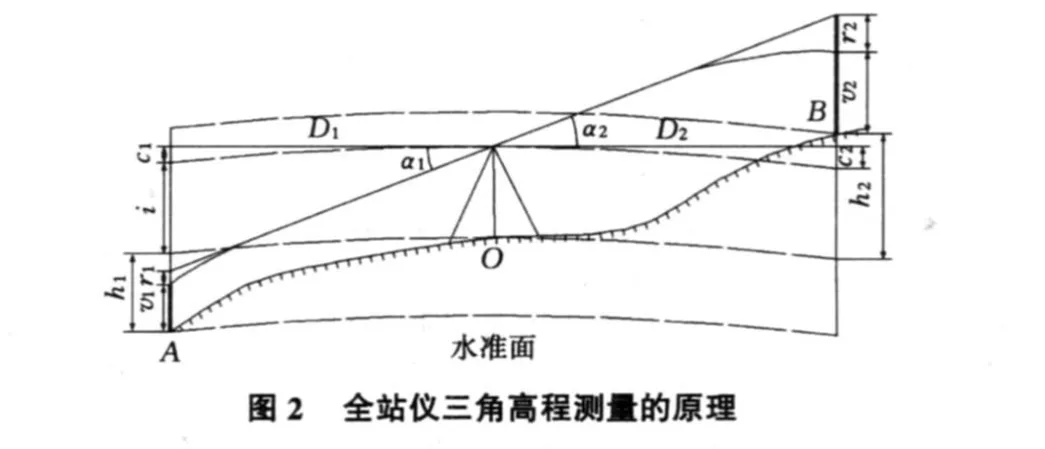
如圖2所示,在已知點(diǎn)A和未知點(diǎn)B分別安置棱鏡,在AB中間安置全站儀,根據(jù)三角高程觀測(cè)原理,可知A,B兩點(diǎn)的高差為:hAB=hOB-hOA=(S2·sinα2-S1·sinα1)+(c2-r2)-(c1-r1)-(v2-v1)。采用中點(diǎn)法測(cè)量高差時(shí)使A,B兩點(diǎn)鏡高相等,即v2=v1,將球氣差的公式代入得到:

由此式可以看出,全站儀中點(diǎn)法高程測(cè)量只與斜距、豎直角和大氣折光系數(shù)有關(guān)。
2.2 精度分析
根據(jù)誤差傳播定律,對(duì)上式進(jìn)行微分,并變?yōu)橹姓`差關(guān)系式,考慮到在千米以下的高程測(cè)量中,球氣差很小,可忽略不計(jì)。再用平距代替斜距,即D=S·cosα,則得到:
其中,mk1,mk2分別為O點(diǎn)至A點(diǎn)和B點(diǎn)的大氣折光系數(shù)中誤差;R為地球曲率半徑,R=6 371 km,后兩項(xiàng)對(duì)高差的影響很小,可以忽略不計(jì)。
若再使前后平距、大氣折光系數(shù)近似相等,前后豎直角也盡量接近相等,則公式變?yōu)?

其中,m為棱鏡高量取中誤差;mk為大氣折光系數(shù)中誤差。
3 兩種方法的精度比較
為了對(duì)全站儀三角高程測(cè)量的精度進(jìn)行更好的分析,利用前面所推導(dǎo)的中誤差公式,對(duì)不同的測(cè)量距離,不同的豎直角進(jìn)行精度估算,并取2倍的中誤差作為極限誤差。以工程中常用的J2全站儀為例,取mα=±2″,測(cè)距標(biāo)稱精度為±(2 mm±2 ppm×D)。測(cè)距按1 km計(jì)算,取ms=±4 mm,mk=±0.04 mm,儀器高與棱鏡高的量取誤差m=±2 mm。
通過比較可以看出,對(duì)向觀測(cè)高程測(cè)量精度比中點(diǎn)法精度要好。對(duì)向觀測(cè)高程測(cè)量在距離小于1 200 m,豎直角小于30°時(shí),其精度能滿足四等水準(zhǔn)的精度要求;當(dāng)距離大于200 m且小于600 m,豎直角小于30°時(shí),對(duì)向觀測(cè)可滿足三等水準(zhǔn)測(cè)量的精度要求。
4 結(jié)語
在適當(dāng)?shù)木嚯x及豎直角范圍內(nèi),可以用全站儀三角高程測(cè)量方法代替水準(zhǔn)測(cè)量方法,提高了測(cè)量速度,節(jié)省了外業(yè)作業(yè)時(shí)間。
[1]何習(xí)平.全站儀中間法與水準(zhǔn)測(cè)量的精度比較[J].水電自動(dòng)化與大壩監(jiān)測(cè),2004,28(4):37-39.
[2]張智韜.全站儀三角高程測(cè)量方法及精度分析[J].西北農(nóng)林科技大學(xué)學(xué)報(bào),2008,36(9):229-234.
[3]孔祥元,梅是義.控制測(cè)量學(xué)[M].武漢:武漢大學(xué)出版社,2002:270-279.
猜你喜歡
北京測(cè)繪(2020年12期)2020-12-29 01:37:18
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(shè)(2019年3期)2019-10-10 01:40:18
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
電測(cè)與儀表(2016年9期)2016-04-12 00:29:52
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
吉林地質(zhì)(2014年3期)2014-03-11 16:47:31
河南科技(2014年22期)2014-02-27 14:18:08
