雙饋發(fā)電系統(tǒng)的神經(jīng)網(wǎng)絡(luò)轉(zhuǎn)速辨識(shí)*
2010-08-28 07:07:24喻明江
電機(jī)與控制應(yīng)用 2010年6期
李 嵐, 喻明江
(太原理工大學(xué)電氣與動(dòng)力工程學(xué)院,山西太原 030024)
0 引言
無速度傳感器雙饋發(fā)電系統(tǒng)轉(zhuǎn)速的準(zhǔn)確辨識(shí)對高性能的矢量控制非常重要。目前,雙饋發(fā)電系統(tǒng)轉(zhuǎn)速辨識(shí)常采用模型參考自適應(yīng)系統(tǒng)(Model Reference Adaptive System,MRAS)。文獻(xiàn)[1]以靜止α-β兩相坐標(biāo)系轉(zhuǎn)子磁鏈的電壓模型作為參考模型、電流模型作為可調(diào)模型,仿真結(jié)果驗(yàn)證了所提策略的正確性;文獻(xiàn)[2]利用小信號模型分析和設(shè)計(jì)了MRAS觀測器,穩(wěn)態(tài)和動(dòng)態(tài)試驗(yàn)證明了所提方法的有效性。但是,MRAS在低速和動(dòng)態(tài)情況下轉(zhuǎn)速辨識(shí)精度會(huì)相應(yīng)下降[3-4];另外,自適應(yīng)控制是一種基于數(shù)學(xué)模型的控制方法,電機(jī)參數(shù)的時(shí)變性也會(huì)給轉(zhuǎn)速辨識(shí)帶來一定誤差,影響系統(tǒng)的控制精度。
人工神經(jīng)網(wǎng)絡(luò)經(jīng)過嚴(yán)格的訓(xùn)練后,具有對非線性系統(tǒng)進(jìn)行辨識(shí)的能力,利用人工神經(jīng)網(wǎng)絡(luò)對雙饋發(fā)電機(jī)轉(zhuǎn)速進(jìn)行辨識(shí),能使神經(jīng)網(wǎng)絡(luò)較準(zhǔn)確地反映電機(jī)轉(zhuǎn)速。本文根據(jù)雙饋發(fā)電機(jī)的數(shù)學(xué)模型,建立了基于MRAS的參考模型和可調(diào)模型,利用后項(xiàng)差分法推導(dǎo)了基于神經(jīng)網(wǎng)絡(luò)的MRAS可調(diào)模型,并用兩層神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)可調(diào)模型中的磁鏈運(yùn)算,通過誤差反傳算法對兩層神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練,得出雙饋發(fā)電機(jī)的辨識(shí)轉(zhuǎn)速。對雙饋發(fā)電系統(tǒng)進(jìn)行了仿真,結(jié)果表明:基于神經(jīng)網(wǎng)絡(luò)的MRAS辨識(shí)轉(zhuǎn)速能反映實(shí)際轉(zhuǎn)速,且辨識(shí)精度得到了有效提高。
1 轉(zhuǎn)速辨識(shí)模型
模型參考自適應(yīng)系統(tǒng)的基本結(jié)構(gòu)如圖1所示。參考模型和可調(diào)模型(自適應(yīng)模型)被相同的外部輸入所激勵(lì),X和X^分別是參考模型和可調(diào)模型的狀態(tài)矢量。參考模型用其狀態(tài)X規(guī)定了一個(gè)給定的性能指標(biāo),該性能指標(biāo)與測得的可調(diào)模型性能X^比較后,將其差值矢量e輸入自適應(yīng)機(jī)構(gòu),由自適應(yīng)機(jī)構(gòu)來修正可調(diào)模型的參數(shù),使得其狀態(tài)X^能夠快速而穩(wěn)定地逼近X,使差值趨于零[5]。

圖1 MRAS基本結(jié)構(gòu)
雙饋發(fā)電機(jī)定子繞組采用發(fā)電機(jī)慣例、轉(zhuǎn)子繞組采用電動(dòng)機(jī)慣例的情況下,兩相靜止α-β坐標(biāo)系下,電壓、磁鏈基本方程為

式中:uαs、uβs,uαr、uβr——定、轉(zhuǎn)子電壓的 α、β 軸分量;
iαs、iβs,iαr、iβr——定、轉(zhuǎn)子電流的 α、β 軸分量;
Ψαs、Ψβs,Ψαr、Ψβr——定、轉(zhuǎn)子磁鏈的 α、β軸分量;
Rs、Rr——定、轉(zhuǎn)子繞組電阻;
Ls、Lr——α、β 坐標(biāo)系下兩相定、轉(zhuǎn)子繞組的自感;
Lm——α、β坐標(biāo)系下同軸定、轉(zhuǎn)子繞組間的等效互感;
ωr——轉(zhuǎn)子角速度;
p——微分算子。
根據(jù)式(1)、(2),可得到兩種形式的轉(zhuǎn)子磁鏈模型:

式(3)不含辨識(shí)值,將其作為參考模型,由它表示的電機(jī)狀態(tài)與實(shí)際相符,即轉(zhuǎn)子磁鏈?zhǔn)菧?zhǔn)確的;式(4)含有辨識(shí)值ωr,將其作為可調(diào)模型,在該模型中,假定電機(jī)參數(shù)是不變的,ωr是可調(diào)參數(shù),即需要辨識(shí)的參數(shù),由可調(diào)模型可估計(jì)出轉(zhuǎn)子磁鏈。
2 基于神經(jīng)網(wǎng)絡(luò)的轉(zhuǎn)速辨識(shí)可調(diào)模型
將式(3)作為轉(zhuǎn)速辨識(shí)參考模型,用一個(gè)神經(jīng)網(wǎng)絡(luò)來構(gòu)造式(4)所表示的可調(diào)模型。
采用后項(xiàng)差分法對式(4)進(jìn)行離散化處理,得到可調(diào)模型的離散化狀態(tài)方程:
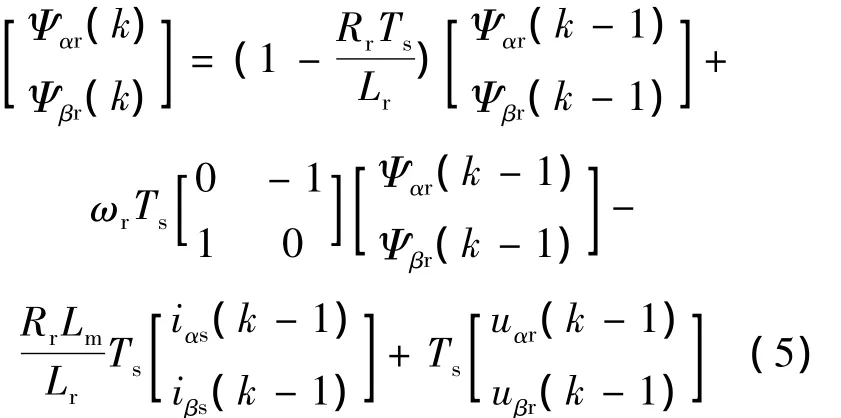
式中:Ts——采樣周期;
k——步數(shù)。
因此,轉(zhuǎn)子磁鏈的估計(jì)值為

式(6)可簡化為如下形式:
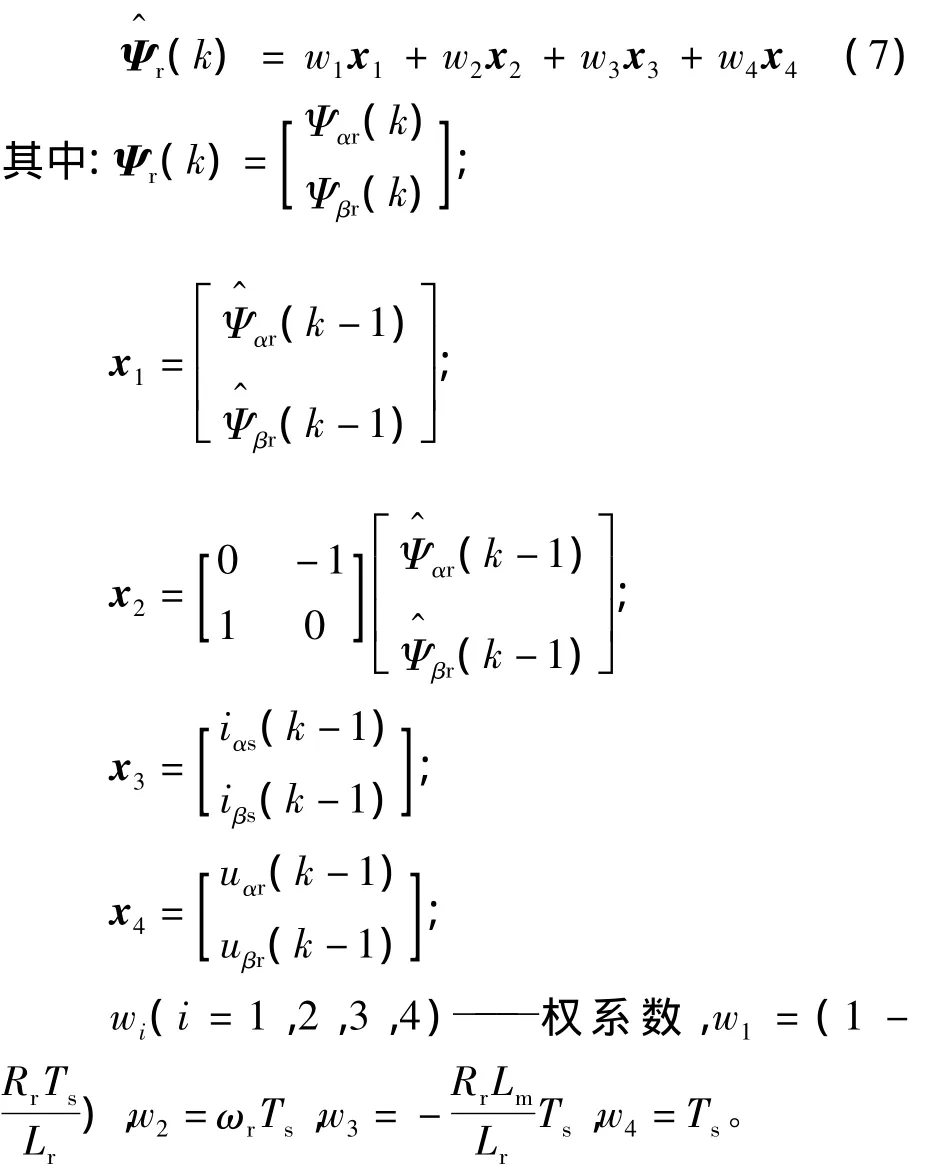
根據(jù)式(7),利用兩層神經(jīng)網(wǎng)絡(luò)模型代替可調(diào)模型,如圖2所示。四個(gè)輸入節(jié)點(diǎn)分別代表轉(zhuǎn)子電壓、轉(zhuǎn)子磁鏈及定子電流的過去值,輸出是目前估計(jì)的轉(zhuǎn)子磁鏈值,權(quán)值w2正比于轉(zhuǎn)子轉(zhuǎn)速。
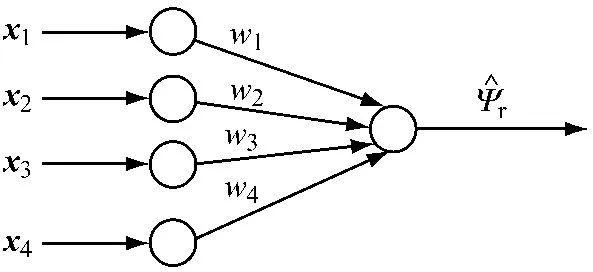
圖2 神經(jīng)網(wǎng)絡(luò)表示的可調(diào)模型
參考模型輸出與神經(jīng)網(wǎng)絡(luò)模型輸出的偏差為

如果由可調(diào)模型估計(jì)的轉(zhuǎn)子磁鏈與參考模型確定的相同,即e(k)=0,則轉(zhuǎn)速估計(jì)值ω^r一定與實(shí)際值ωr一致;如果兩者存在偏差,則說明轉(zhuǎn)速估計(jì)值ω^r一定與實(shí)際值ωr不一致,此時(shí)利用神經(jīng)網(wǎng)絡(luò)進(jìn)行權(quán)值調(diào)整,最終使轉(zhuǎn)速估計(jì)值ω^r與實(shí)際值ωr相等。
定義誤差函數(shù):

權(quán)值變化:
將式(6)、(9)代入式(10),可得:
因?yàn)闄?quán)值w2正比于ωr,又由:

可得轉(zhuǎn)速辨識(shí)值:
3 雙饋發(fā)電系統(tǒng)仿真
將基于神經(jīng)網(wǎng)絡(luò)的MRAS轉(zhuǎn)速辨識(shí)方法應(yīng)用于雙饋發(fā)電系統(tǒng)。圖3所示為基于定子磁場定向的雙饋發(fā)電機(jī)勵(lì)磁系統(tǒng)轉(zhuǎn)子側(cè)矢量控制原理框圖。建立了相應(yīng)的MATLAB仿真模型,重點(diǎn)對發(fā)電機(jī)轉(zhuǎn)速特性進(jìn)行仿真,并與基于MRAS辨識(shí)雙饋發(fā)電系統(tǒng)的轉(zhuǎn)速特性進(jìn)行比較。
當(dāng)發(fā)電機(jī)工作在亞同步、同步、超同步狀態(tài)時(shí),設(shè)定給定轉(zhuǎn)速分別為=1 350 r/min、=1 500 r/min=1 700 r/min時(shí),發(fā)電機(jī)轉(zhuǎn)速仿真波形分別如圖4、5、6所示。
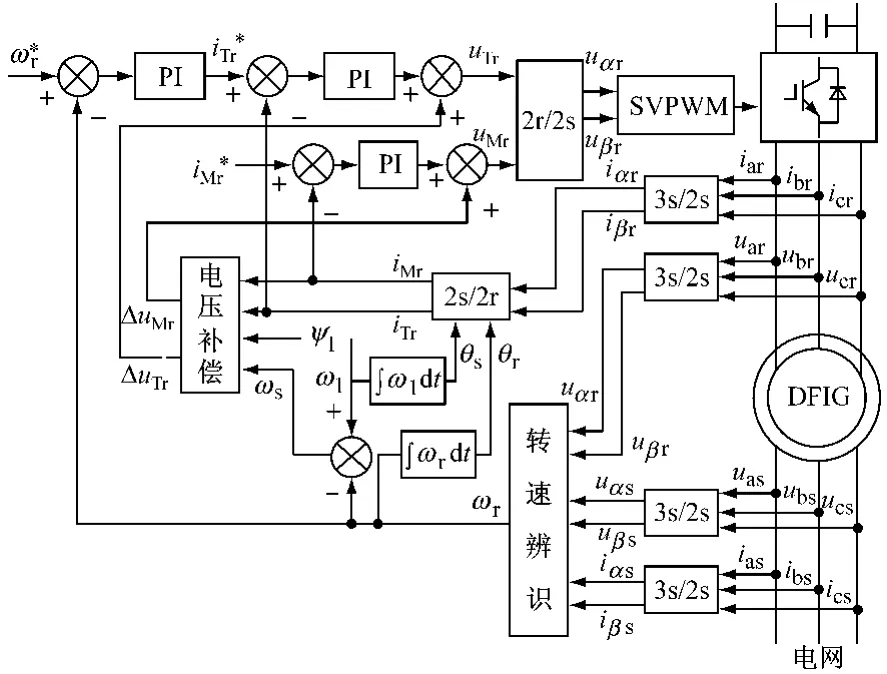
圖3 雙饋發(fā)電勵(lì)磁系統(tǒng)
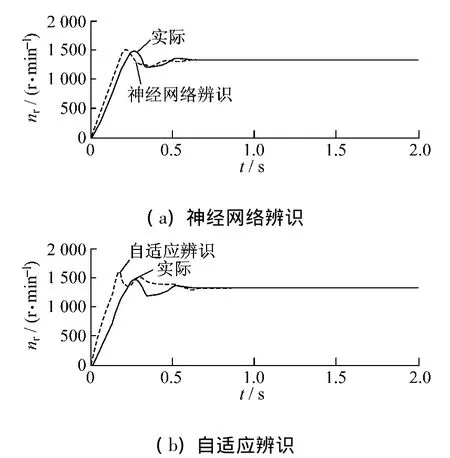
圖4 n*r=1 350 r/min時(shí)轉(zhuǎn)速波形
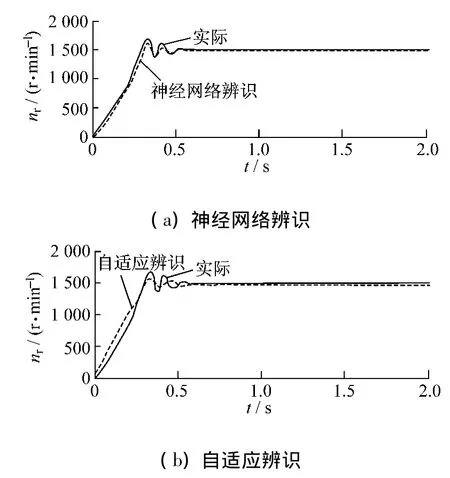
圖5 n*r=1 500 r/min時(shí)轉(zhuǎn)速波形

圖6 n*r=1 700 r/min時(shí)轉(zhuǎn)速波形
4 結(jié)語
從仿真結(jié)果可以看出:在起動(dòng)過程中,基于神經(jīng)網(wǎng)絡(luò)的MRAS辨識(shí)轉(zhuǎn)速與實(shí)際轉(zhuǎn)速稍有偏差,但與基于MRAS辨識(shí)方法相比,偏差減小;進(jìn)入穩(wěn)態(tài)后,基于神經(jīng)網(wǎng)絡(luò)的MRAS辨識(shí)轉(zhuǎn)速能夠跟隨實(shí)際轉(zhuǎn)速,但MRAS辨識(shí)轉(zhuǎn)速與實(shí)際轉(zhuǎn)速之間存在一定的偏差。因此,采用基于神經(jīng)網(wǎng)絡(luò)的MRAS辨識(shí)雙饋發(fā)電機(jī)系統(tǒng)轉(zhuǎn)速,可以使轉(zhuǎn)速辨識(shí)精度得到有效提高。
[1]秦濤,呂躍剛,肖運(yùn)啟,等.基于模型參考自適應(yīng)的無速度傳感器雙饋風(fēng)力發(fā)電機(jī)組控制技術(shù)研究[J].現(xiàn)代電力,2008,25(4):64-70.
[2]Roberto Cardena,Ruben Pena,Jose Proboste,et al.MRAS observer for sensorless control of standalone doubly fed induction generators[J].IEEE Trans on Energy Conversion ,2005,20(4):710-718.
[3]李楠,姚興佳,邢作霞.雙饋風(fēng)力發(fā)電機(jī)無速度傳感器矢量控制[J].可再生能源,2006(5):83-85.
[4]陳伯時(shí),楊耕.無速度傳感器高性能交流調(diào)速控制的三條思路及其發(fā)展建議[J].電氣傳動(dòng),2006,36(1):3-8.
[5]夏超英.交直流傳動(dòng)系統(tǒng)的自適應(yīng)控制[M].北京:機(jī)械工業(yè)出版社,1998.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
大電機(jī)技術(shù)(2017年3期)2017-06-05 09:36:02
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
軍事文摘(2016年16期)2016-09-13 06:15:49