基于DSP的永磁直線同步電動機無傳感器功率角測量*
2010-08-28 07:07:16王福忠袁世鷹
電機與控制應用 2010年5期
王福忠, 袁世鷹, 劉 靜
(1.河南理工大學電氣工程與自動化學院,河南焦作 454000;
2.中國礦業大學機電與信息工程學院,北京 100083)
0 引言
分段式永磁直線同步電動機(Permanent Magnet Linear Synchronous Motor,PMLSM)采用永磁體(動子)移動、電樞繞組(定子)分段的結構,適應于長距離、大推力的工業場合。但是,該電動機在運行中失步和機械振蕩等問題一直困擾著電機的設計者和使用者。要實現該電機的穩定控制,抑制電機推力的波動都需要已知電機的動子位置與功率角。傳統測量方法大多采用機械傳感器法和反電動勢法。機械傳感器法需要在動子上安裝相應的信號傳感器,投資大。反電動勢法是基于基波激勵的方法,簡單經濟可靠,但在零速或低速時會因反電動勢過小無法檢測而失敗。
為了能夠獲得包括零速的全速范圍內電機動子位置及功率角,設計了基于DSP的高頻電壓注入法的分段式PMLSM功率角測量裝置。
1 PMLSM功率角測量的基本原理
如果以PMLSM的定子a相繞組軸線為參考軸,功率角應等于動子永磁體在a相定子繞組中產生的感應電勢V·a與a相繞組外加工作電壓U·a之間的相位差角。由電機學原理可得,動子永磁體在a相定子繞組中產生的感應電勢、a相定子繞組的供電電壓、a相軸之間的關系如圖1所示。圖1中,θr為動子的位置角。
由圖1可得PMLSM的功率角θ與動子位置角θr的關系為

式中:φ——a相電壓相對于定子a相繞組軸線的相位角,以ω做旋轉運動。

式中:φ0為初始相位,可由電機剛起動時(t=0+),施加在定子a相繞組上的電壓和電流求得。利用式(2)計算φ時,時間為電壓在每個周期內的旋轉時間,即電壓波形以a相繞組軸線為參考軸,每經過一個周期(對應的角度旋轉360°)時間清零,重新開始計時。θr為動子位置角,是直線電機的d軸(旋轉軸)在二個極距τ距離內與定子a相繞組軸線(非移動)之間的夾角,電機d軸每移動2個極距τ(對應的夾角移動360°),θr重新開始計算。
由式(1)可知,求取PMLSM的功率角,首先需要得到動子的位置角θr。本文采用在PMLSM a相繞組中持續注入高頻電壓信號[1-7],利用高階帶通濾波器提取高頻電壓與電流信號,進而計算出電機動子位置角θr。

圖1 直線電機功率角與動子位置角關系圖
1.1 電機凸極效應和動子位置角及高頻電流三者關系式
為了簡化分析,假設:鐵心非飽和,電機中的渦流損耗和磁滯損耗、電機繞組漏感可以忽略,氣隙中的磁勢呈正弦分布。
在以上假設情況下,利用電機分析理論,建立高頻激勵下的 PMLSM的數學模型為:假設在PMLSM的a相繞組上注入高頻電壓的角頻率為ωi,幅值為Ui,則該高頻電壓信號可表示為

經A-B-C坐標系向α-β坐標系變換,得到在α-β坐標系下高頻電壓信號為

式(3)中,由于注入的高頻電壓信號頻率遠高于基波頻率,定子電阻的影響可以忽略,故在α-β坐標系下,PMLSM的電壓數學模型也可以用式(4)表示:

式中:Lαβ——α-β 坐標系下的電感矩陣;
iαβ——α-β 坐標系下的高頻電流。
α-β坐標系下的電感矩陣為[3]
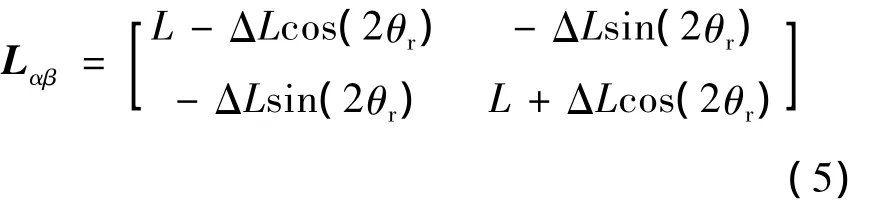
由式(5)可看出電感矩陣Lαβ中包含動子位置角信息,其中:L為平均電感,L=(Ld+Lq)/2;ΔL為半差電感,ΔL=(Lq-Ld)/2;θr為動子位置角;Ld為直軸電感;Lq為交軸電感。
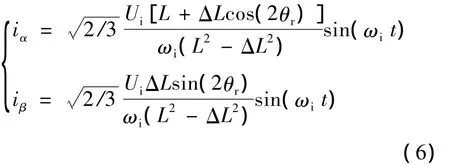
根據式(2)、(4)、(5)可求得高頻激勵下PMLSM的電流:
折算到A-B-C坐標系,a相電流為

由式(7)可得a相高頻電流信號的幅值Ia:


由式(9)可以看出,由于PMLSM的d軸和q軸電感不相等(即ΔL≠0),則a相高頻電流信號的幅值Ia與動子位置角信息有關。在ΔL、L已知的情況下,利用式(9)可求得凸極式PMLSM的動子位置角θr。
1.2 高頻電流信號幅值的獲取方法
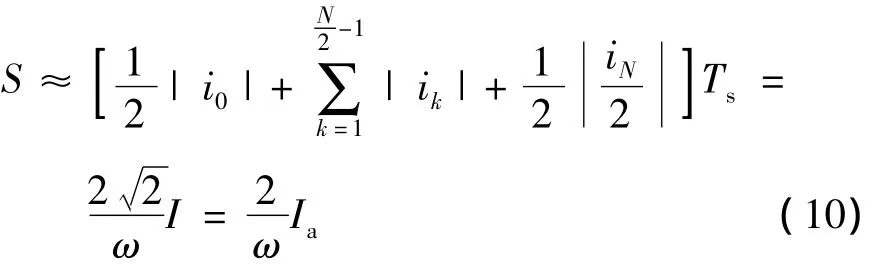
本文采用半周積分算法求得高頻電流幅值,其公式為
可得a相高頻電流信號的幅值Ia中包含有動子位置角信息,將式(8)變形可得PMLSM的動子位置角θr:
式中:Ts——采樣間隔;
ik——第k次采樣值;
N——一個周期內的采樣點數,為了提高計算精度,選取N=48,即采樣頻率為48 kHz;
i0——k=0 時的采樣值;
iN/2——k=N/2 時的采樣值。
應用式(10)可求得電流幅值Ia。
2 測量系統硬件設計
功率角測量裝置主要任務是完成電機A相繞組的工作電壓獲取、高頻激勵信號的產生、高頻電壓與各段電樞A繞組的高頻電流信號的檢測及功率角的計算,其硬件組成如圖2所示。數字信號處理器(DSP)選擇具有3.3 V的外圍接口電壓、低功耗的TMS320F2812處理器。外部擴展了1M字存儲器、液晶顯示器、A/D轉換器、通信電路、鍵盤電路等。工作原理為:電壓和電流傳感器獲取高頻電壓、各段定子的高頻電流信號,經1 kHz帶通濾波器,送入ADS8364;而電機a相繞組的工作電壓則由電壓傳感器獲取后,經低通濾波器,送入ADS8364;然后DSP中央處理單元將利用式(10)和式(9)計算出電機的動子位置角,再利用式(1)和式(2)計算出電機的功率角,并通過通信接口送往監控PC。

圖2 功率角測量系統基本結構框圖
2.1 高頻信號發生器的設計[8]
高頻信號利用TMS320F2812輸出的正弦脈寬調制(SPWM)波產生,其原理如圖3所示。圖中緩沖電路的作用是對PWM口輸出的SPWM波進行緩沖,并將電壓拉高到約12 V,以供后級低通濾波電路使用。這一部分電路由兩個芯片組成:一片用三態緩沖器,由于PWM口的輸出為3.3 V TTL電平,為了保證與后級接口芯片的電平一致,則選用74HCT04芯片實現TTL與COMS電路之間的電平轉換;另一片選用光電藕合器6N137實現電路之間的隔離。濾波電路的主要作用是將直流脈動信號轉換成正弦交流信號,采用簡單的R-C電路。
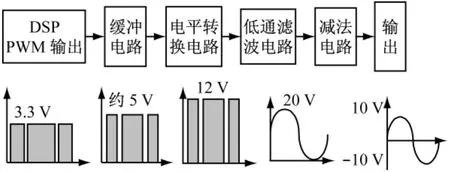
圖3 高頻信號發生器的原理結構框圖
減法電路的主要作用是將0~20 V正弦交流信號轉換成-10 V~+10 V正弦交流信號,設計時可利用差分式電路來實現其功能。為了簡化電路,選用美國AD公司的精密儀表放大器AD524作為前置放大。AD524采用雙電源供電,供電電壓為±15 V。為了提高驅動能力,輸出電路采用對管TIP35C和TIP36C作為功率晶體管。
2.2 耦合電容器和電壓電流互感器選型
(1)耦合電容器的選擇。耦合電容器的作用主要是實現高頻信號發生器與電機的工作電源之間的隔離。要求在1 kHz的高頻電壓信號下其阻抗盡量小,而在電機的電源工作頻率下其阻抗越大越好,并滿足耐壓要求。由于試驗電機的電源工作頻率為15 Hz以下,電壓在200 V以下,因此,選擇的耦合電容器的參數為:C=10 μF(x=100);耐壓電壓為800 V。
(2)電壓和電流互感器的選擇。為了能夠快速、精確地測量高頻電壓與電流信號及a相繞組的工作電壓,選用線性度好,靈敏度高的霍爾型電壓和電流傳感器。其中霍爾型電壓傳感器的參數為:電壓檢測范圍為~300 V;精度為0.5/1 000。霍爾型電流傳感器的參數為:電流檢測范圍為~0.5 A;精度為0.5/1 000;電壓和電流互感器的輸出均為4~20 mA。
2.3 1 kHz帶通濾波器設計
測量的高頻電壓和電流信號中含有低次諧波信號、PWM開關諧波電流及其他干擾信號。為了把微弱的、頻率為1kHz的高頻電壓和電流信號從強噪聲背景中檢測出來,選擇了美國MAXIM公司開發的8階連續時間有源濾波器芯片MAX274,將4個二階結合,構成了如圖4所示的8階切比雪夫帶通濾波器。

圖4 濾波器接線圖
2.4 A/D轉換模塊的選擇及其與DSP的接線
A/D轉換器件的性能決定著系統性能的優劣。為了保證測量精度、電壓與電流采樣同時性及48 kHz采樣頻率的要求,功率角測量裝置選用TI公司的ADS8364作為A/D轉換模塊。該器件具有高速(采樣頻率250 kHz)、低功耗、6通道同步采樣與轉換、單+5 V供電、16位高速并行接口等特點,完全滿足本系統的要求。
由于ADS8364和TMS320F2812都是TI公司生產的高速芯片,故兩者在速度上能夠完全匹配,可以實現芯片間的無縫連接。本系統選擇直接地址讀方式,由XA[2∶0]作為變換結果寄存器低位地址,當ADS8364的CS引腳為高電平時,其數據總線處于高阻狀態,當CS引腳置低電平時,并口數據總線上輸出當前數據。具體的連接如圖5所示。為了實現6個通道的同步采樣,把TMS320F2812的GPIDB15引腳與ADS8364的HOLDA、HOLDB、HOLDC信號相連,控制6個采樣/保持器的同步。
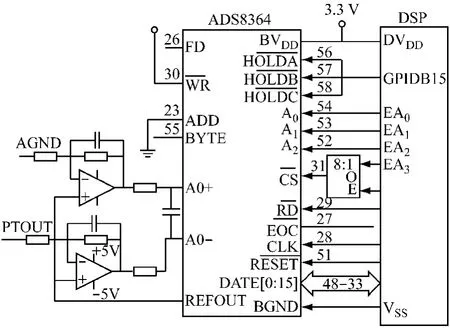
圖5 ADS8364與和TMS320F2812的連接圖
2.5 高頻電壓信號注入方式與信號獲取接線
由于用于驅動提升系統的PMLSM,運行距離長,定子電樞繞組分的段數較多,制造與安裝時不可能做到各段電樞繞組與動子永磁體之間的氣隙完全均勻相等和各段電感量一致。為了減少氣隙不均勻的影響,在測量時,測量裝置應時刻跟蹤電機動子永磁體的運動位置,得到與動子永磁體相耦合的定子電樞繞組,選取對應的電感值,來消除由于電機氣隙變化所導致的誤差。高頻電壓信號注入方式與信號獲取接線原理如圖6所示。
3 功率角測試試驗
試驗電機是4段式PMLSM,4載荷1.2 t。電機各段初級電樞繞組的參數為:單臺定子長度680 mm,槽數39,極數2p=12,極距 τ=51 mm,電樞繞組的電抗Xt=9.83 Ω;電阻R=2.985 Ω,額定電流Iamax=25 A。
利用圖2所示的功率角測量系統,并按照圖6所示的功率角測量原理進行了接線和試驗。為了驗證測量精度,用一個直線光柵尺同時進行功率角測量,將DSP測量系統測得的功率角與直線光柵尺測得的功率角進行比較,驗證DSP測量系統的測量精度。
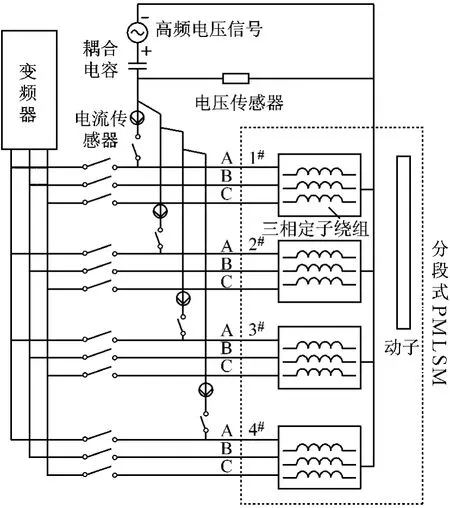
圖6 高頻信號注入與獲取接線原理圖
表1為分別采用光柵尺和高頻注入法獲得的PMLSM的動子位置角。由該表可看出最大靜態誤差為 ±1°。將表1所示的數據代入式(1)、(2),分別計算出的PMLSM功率角的誤差小于±1.6°,滿足控制所需要的精度。說明建立PMLSM功率角測量數學解析模型合理,設計的DSP測量系統精度滿足要求。
4 結語
建立了PMLSM的功率角與動子位置角的關系方程和高頻激勵下的該電機的高頻電流電樞電感-動子位置角之間的解析方程,設計了基于DSP的高頻信號注入法PMLSM動子功率角檢測系統。實踐表明:
(1)采用高頻信號注入法求取動子的PMLSM動子位置角和功率角,實時性好,精度滿足要求;
(2)TMS320F2812具有高速的工作頻率,豐富的片上外設,充分滿足了PMLSM動子位置角和功率角測量的需要;

表1 動子位置角測試結果對照表
(3)A/D轉換模塊的選擇以及設計其接口電路時,應保證測量精度、電壓與電流的采樣同時性及采樣頻率的要求。
[1]余佩瓊,陸億紅,王涌.永磁直線同步電動機無位置傳感器控制系統的研究[J].中國電機工程學報,2007,27(24):53-57.
[2]陸華才,徐月同,余佩瓊,等.永磁直線電機繞組電感飽和效應的有限元分析及應用[J].中國電機工程學報,2006,26(25):109-113.
[3]秦峰,賀益康.兩種高頻注入法的無傳感器運行研究[J].中國電機工程學報,2005,25(5):116-121.
[4]Jang J H,Sul S K,Ha J 1.Sensorless drive of surfacemounted permanent-magnet motor by high-frequency signal injection based on magnetic saliency[J].IEEE Trans on industry Applications,2003,39(4):1031-1038.
[5]Jang J H,Ha J I.Analysis of permanent-magnet machine for sensorless control based on high-frequency signal injection[J].IEEE Tarns on Industry Appilcaitons,2004,40(6):1595-1604.
[6]王福忠,汪旭東,焦留成,等.同步電動機電磁力角與最大推力控制策略的研究[J].煤炭學報,2001,26(3):307-312.
[7]王福忠,焦留成,袁世鷹.基于神經網絡永磁直線同步電動機提升系統動態模型建立與仿真[J].系統仿真學報,2002,24(9):1249-1254.
[8]宋萌.基于DSP的正弦信號發生器設計[J].電子元器件應用,2006(9):64-66.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
