基于CAN總線的汽輪機監測系統研究
2010-09-10 00:44:58上海特種設備監督檢驗技術研究院上海200062王化南嚴禎榮
自動化博覽 2010年4期
(上海特種設備監督檢驗技術研究院,上海 200062)王化南,嚴禎榮
1 引言
汽輪機監測儀表系統(Turbine Supervisory Instrumentation,TSI)是一種連續監測汽輪發電機組轉子和汽缸機械工作參數的多路監控系統,對汽輪機組的安全運行起著重要的作用。由于汽輪發電機組容量的不斷增大,對汽輪機監視保護儀表(TSI)的要求越來越高,使用的傳感器的類型和數量也較原來大為增加,這樣就大大增加了現場中電纜的使用長度以及系統安裝的復雜性大為提高,使系統的可靠性得不到保證。
所以本文研究了基于CAN總線的儀表監測系統的設計,除了保證監測系統可靠工作和降低成本之外,還要具有通用性、實時性和可擴展性等特點。減少現場電纜的長度和安裝的復雜性,提高系統的可靠性[1,2]。
2 互聯轉換模塊的總體設計方案
由于現場總線技術的運用,可以將整個汽輪發電機組的振動信號的測量、故障分析、故障診斷與系統管理通過CAN總線被納入一套系統之中,系統示意圖如圖1所示。該系統具有結構簡單,維護方便,投資省的優點。處于底層的智能傳感器負責進行機組振動信號的測量與傳輸;網絡上的PC(工程師站)對振動解析系統中的各個智能設備的工作模式進行組態;同時可以觀察振動的趨勢,振動的頻譜等。將振動的報警判別和CANT(即快速傅立葉變換)分析功能下放到CAN振動傳感器,以提高實時性。
3 系統硬件實現
系統中連接在CAN總線上的TSI儀表稱之為智能監測節點,TSI儀表由傳感器、振動信號處理電路,A/D轉換電路,微處理接口電路和CAN總線通信模塊組成,其中微處理器CPU采用AT89C51。CAN振動TSI儀表結構框圖如圖2所示。先由汽輪機監測儀表TSI獲得現場設備的測試數據,然后通過儀表內部的單片機完成對CAN總線控制芯片MCP2510的初始化和訪問其內部的收發緩沖器,來實現對CAN的操作并將需要發送/接收的CAN數據幀由CAN總線收發器MCP2551,發送/接收到CAN總線上面去,其中為了增強抗干擾能力,采用了光電隔離的方法。上位控制網絡上節點主要是用來將智能監測節點通過CAN總線所傳來的數據進行收集整理并顯示給監控人員,以利于監控人員根據儀表數據來對生產狀況進行自動控制,并將生產指令通過CAN總線傳給智能監測節點。
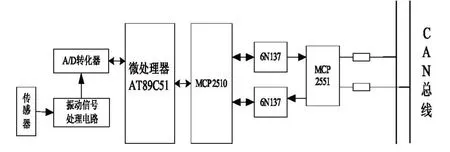
圖2 振動傳感器結構框圖
4 主程序的設計
在軟件設計中,只需要在儀表原來的程序中加入與MCP2510的通信程序就可以完成儀表和CAN總線的通信接口的實現。主程序流程圖如圖3所示。

圖3 主程序流程圖
系統中發送采用的是查詢方式,當需要發送數據時,發送模塊首先進行狀態查詢,以判定發送緩沖器是否空閑,如果空閑便完成發送緩沖區的填寫,并送出發送請求信號,完成一幀CAN報文的發送。系統中接收采用的也是查詢方式,系統定時查詢接收緩沖器的狀態,如果有報文被接收到,則判斷該報文的標識符是否是本節點的地址,如果是就接收緩沖器的數據,再進行進一步的處理,并清除緩沖器滿標志。依照主程序的流程圖,使用C語言編寫主程序的主要部分,此處略。
5 結語
本文對當前的TSI儀表系統的常用結構組成進行了改進,提出了在汽輪機工作現場將傳統的儀表由新的智能化儀表所代替,可以將監測到的各種現場信息直接轉化成數字信號,并通過設計的CAN總線和以太網的互聯模塊來把數據傳遞到遠程的控制室內或連接到Internet,實現真正的遠程監控。
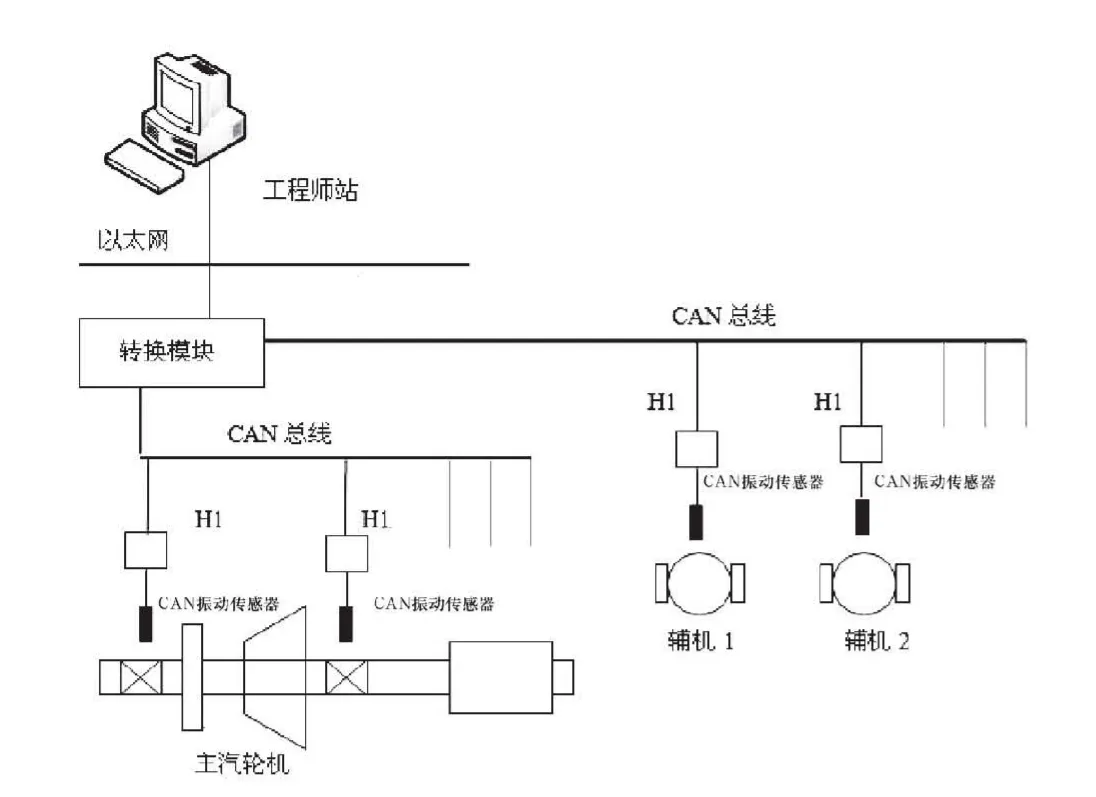
圖1 系統示意圖
[1]陽憲惠.現場總線技術及其應用[M].北京: 清華大學出版社,1999.
[2]鄔寬明.CAN總線原理和應用系統設計[M]. 北京: 北京航空航天大學出版社,1996
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年5期)2021-01-04 01:29:00
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(2020年6期)2020-09-10 07:22:44
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
廣西電力(2016年4期)2016-07-10 10:23:38
工業設計(2016年4期)2016-05-04 04:00:23
