筒式磁流變液聯軸器設計與實驗研究
2010-09-14 07:30:24李名杰李友榮魯光濤宋鋼兵
武漢科技大學學報 2010年6期
李名杰,呂 勇,李友榮,魯光濤,宋鋼兵,2
(1.武漢科技大學冶金裝備及其控制教育部重點實驗室,中國武漢,430081; 2.休斯頓大學智能材料與結構實驗室,美國休斯頓,77004)
筒式磁流變液聯軸器設計與實驗研究
李名杰1,呂 勇1,李友榮1,魯光濤1,宋鋼兵1,2
(1.武漢科技大學冶金裝備及其控制教育部重點實驗室,中國武漢,430081; 2.休斯頓大學智能材料與結構實驗室,美國休斯頓,77004)
討論結構設計、外加磁場、輸入轉速和轉矩對MRF聯軸器傳動扭矩的影響。在Bingham模型基礎上,通過理論計算,得出筒式結構扭矩傳遞值在工作間隙減小過程中趨于某一極限值結論,按此結論設計出傳動實驗裝置,通過實驗對筒式磁流變液連軸器的輸出性能進行驗證,所得實驗結果與理論推導結果相吻合。
磁流變液;聯軸器;筒式結構
磁流變液(MRF)是一類新型智能材料,它是由飽和磁感應強度高矯頑力小的軟磁微粒分散于不導磁油液中所形成的一種懸濁液。在外加磁場下,該懸濁液的結構和性能會發生瞬間改變,其粘滯系數因大數量級的增加而表現出類固體性能,該類固體的屈服強度隨外加磁場變化而變化。MRF用于扭矩的研制目前有:Bansbach[1]設計的多片式和雙盤式磁流變轉矩傳遞裝置;Gopalswamy[2]等關于降低風扇離合器磁阻的MRF離合器設想;Hamp ton[3]設計的小間隙和高磁通量密度的M RF聯軸器;Carlson[4]關于與飛輪做成一體的M RF制動器設想;Kavlicoglu[5]關于雙圓盤式大轉矩磁流變離合器的實驗(轉矩為7.9 N·m);中國科技大學試制的帶加壓裝置的M RF離合器(實驗轉矩為7 N·m)。然而,上述諸研制的不足是裝置傳遞的扭矩值較低。
本文就MRF聯軸器用于重載傳動輥道沖擊減震和離合控制問題,討論結構設計等因素對MRF傳動扭矩的影響,并制作相應實驗平臺,驗證磁流變液聯軸器(MRC)的輸出性能。
1 M RC設計理論
1.1 本構模型
M RC利用磁流變液智能材料在剪切模式下的工作性能,利用MRF聯軸器傳動、減震、緩沖、離合等的“智能”特性在兩傳動軸之間進行能量傳遞。MRC中的磁流變液在無外加磁場作用時表現為牛頓流體,當施加外加磁場后,在極短時間內(數毫秒)表現為賓漢姆(Bingham)流體。而Bingham流體模型[6]描述的是低剪切速率下的磁流變液宏觀力學行為,其本構模型為

式中:τ為磁流變液剪切應力;τB為磁流變液磁性顆粒在磁場作用下產生的剪切屈服應力;η為磁流變液動力黏度系數;γ·為磁流變液的剪應變率。
1.2 筒式MRC理論設計公式
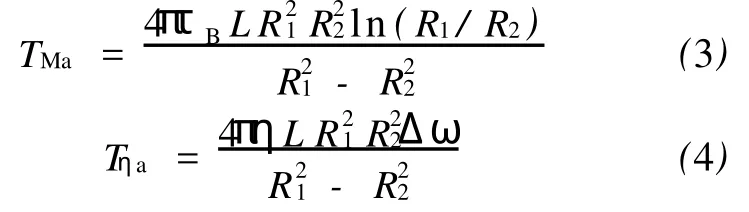
筒式M RC結構示意圖如圖1所示。按照磁流變液在筒形區域流動特性,依據本構模型進行計算,得出在屈服區域磁流變液傳遞轉矩為[7]服應力傳遞轉矩 TMa和黏性力傳遞轉矩 Tηa兩部分組成,分別為
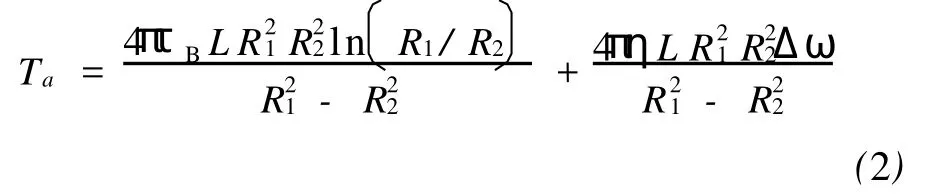
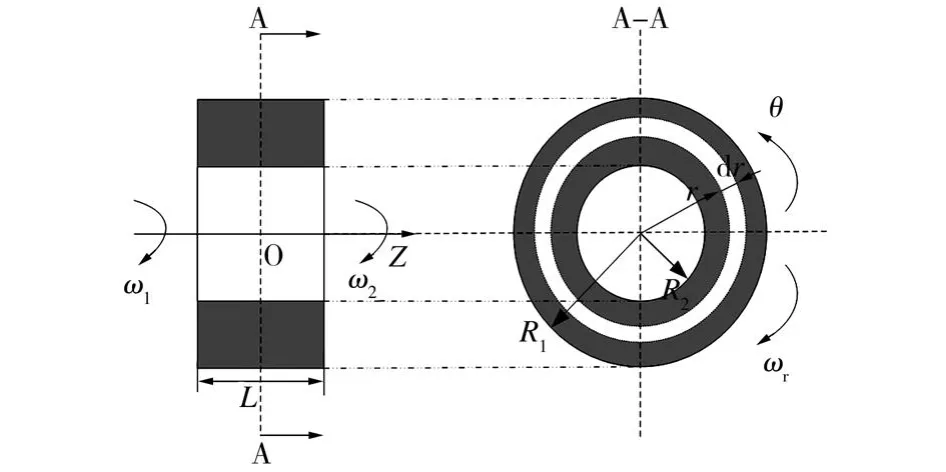
圖1 筒式M RC結構示意圖Fig.1 Schematic diagram of cylindrical M RC structure
1.3 扭矩理論分析
很少有研究者在依據上述扭矩傳遞公式進行結構設計時對其作進一步的討論,為此,本文對式(2)作進一步推導。聯軸器所傳遞的扭矩由磁場引起屈服應力所產生的扭矩 TMb和磁流變液黏性力所產生的扭矩 Tηb兩部分組成,其中黏性力所產生的扭矩不受磁場的影響,磁場引起屈服應力所產生的扭矩起決定作用,磁流變液聯軸器所能傳遞的最大負載扭矩由磁場強度決定。磁場引起的剪切應力扭矩可由式(3)計算,令 x=R1/R2,則式(3)簡化為


上述分析結果基于如下假定:結構上兩筒之間的距離無限縮小,磁場引起的屈服應力扭矩趨近于極限值2πτBLR21。本研究所討論的MRC兩筒間距為0.6 mm,R1為50.6 mm,R2為50 mm,從而滿足 R1≈R2這一條件 。
2 M RC樣機與實驗裝置設計
2.1 MRC樣機設計
筒式磁流變液聯軸器主機由轉動、磁流變液、線圈部分、潤滑密封和支承結構5部分組成,其縱切面示意圖如圖2所示。
2.2 實驗裝置設計
MRC的主動軸、從動軸分別與變頻電機和負載(磁粉制動器)聯結,通過工業控制機調節電機轉速、負載大小以控制MRC的工作負載,并通過兩個ZJ扭矩傳感器測量M RC主從動軸的轉速和扭矩,所測得的數據通過扭矩測量卡存入工業控制機。MRC實驗框圖、M RC實驗裝置圖分別如圖3、圖4所示。
2.3 M RC實驗裝置主要部分
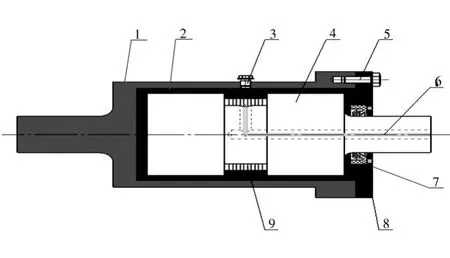
圖2 M RC縱切面示意圖Fig.2 M RC sectional drawing
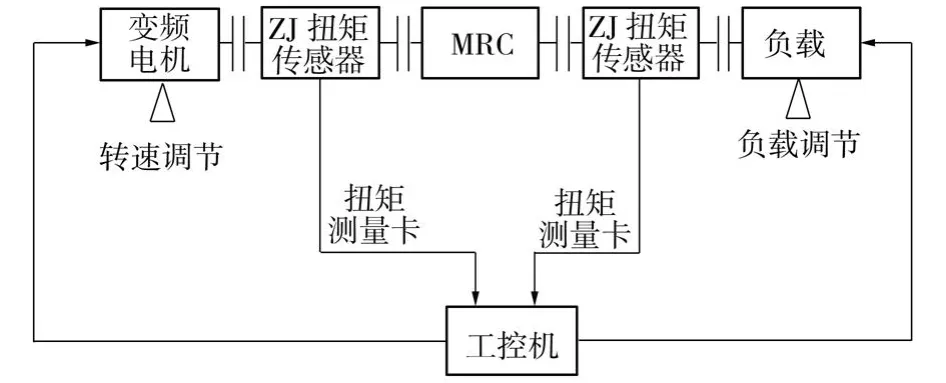
圖3 M RC實驗框圖Fig.3 M RC test diagram
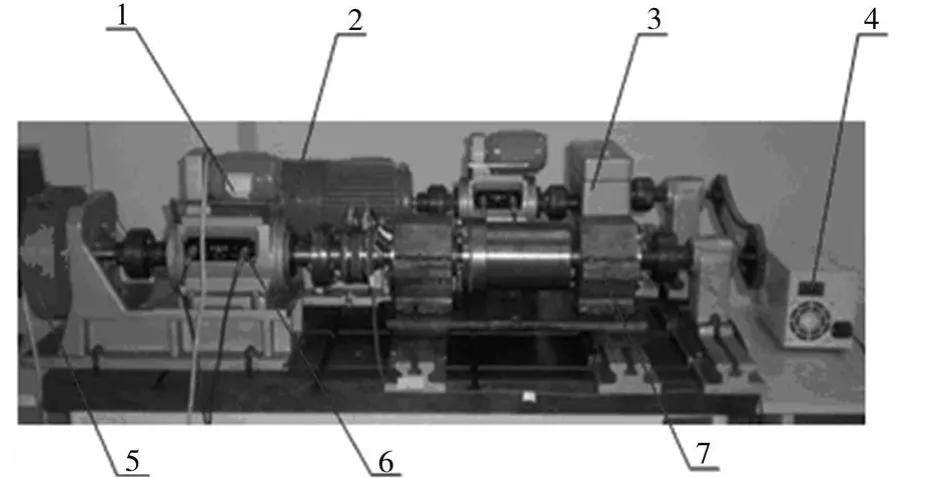
圖4 M RC實驗裝置圖Fig.4 M RC experimental equipment
MRC實驗裝置主要組成部分為:①磁流變液聯軸器樣機(見圖4);②動力輸入部分:三相感應變頻電機(額定功率0.55 kW,輸入電壓380 V,同步轉速1 500 r/min);變頻器(輸入規格AC 3PH380~460 V、50/60 Hz,輸出規格AC 0~240 V、1.7 kVA、4.5 A,變頻范圍2~200 Hz);③數據采集部分:ZJ10型轉矩轉速傳感器(額定轉矩10 N·m,轉速 0~6 000 r/min);ZJ50型轉矩轉速傳感器(額定轉矩50 N·m,轉速0~5 000 r/min);TC-1轉矩轉速測試卡(扭矩測試精度+0.2%FS);PC-400數據采集控制卡;④數據顯示部分:為本實驗臺專門開發的數據采集程序及界面顯示程序,可直接在W INDOWS環境下進行數據結果顯示。⑤負載裝置部分:FZ-5型磁粉制動(加載)器,其額定轉矩為50 N·m,激磁電流為0~2 A,允許滑差功率為1.1 kW。
3 實驗驗證
3.1 實驗內容
負載特性曲線:研究在一定的輸入轉速和輸入電流條件下,輸出扭矩與輸出速度間的關系,當調解負載端制動力矩使其增大時,輸出轉速將發生變化,其中,固定電流為2A,輸入轉速為1 000 r/min。
臨界制動扭矩輸出特性曲線:研究不同輸入速度下臨界扭矩與輸入電流間的關系,其中臨界扭矩是評判MRC性能的主要參數。
3.2 實驗結果與討論
MRC負載特性曲線和臨界制動扭矩輸出特性曲線分別如圖5、圖6所示。
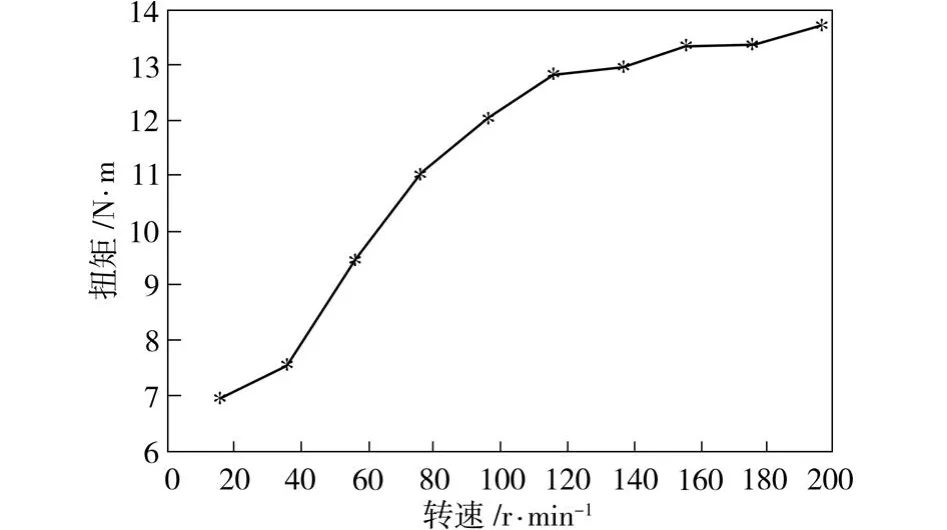
圖5 M RC負載特性曲線Fig.5 Loading characteristic curve of M RC
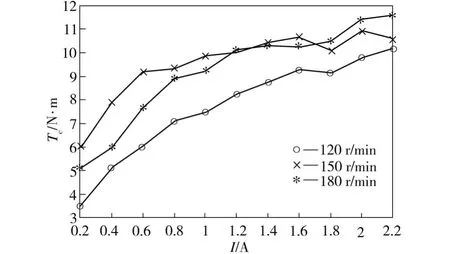
圖6 M RC臨界制動扭矩輸出特性曲線Fig.6 Critical braking torque output characteristic curve of M RC
從圖5中可看出,MRC在低速區(40~120 r/min)扭矩提升較快,在高速區(140 r/min以上)扭矩變化不大。因此,要想獲得良好的扭矩提升性能,應使MRC盡量工作在低速區。這是因為,當M RC輸入端轉速過高時,液體的剪切速率很大,而輸出端負載轉矩隨轉速的變化較小,也就是說M RC在低速區的制動效果要好于高速區的制動效果。這種變化規律與M RF液體本身的剪切應力特性是對應的。從圖6中可以看出,輸入電流是影響臨界制動扭矩大小的主要因素,這與MRF特性相對應。當電流超過一定值后,磁流變液聯軸器工作磁場出現飽和狀態,實測扭矩值開始趨于某一確定值。此外,最大傳遞扭矩值也與輸入端的傳遞速度有關,180 r/min時所傳遞的扭矩值明顯高于120 r/min所傳遞的扭矩值,這是因為磁流變液材料具有黏性。式(2)中聯軸器傳遞的扭矩黏性力部分包含了轉速差分量,并在實驗中驗證了利用Bingham模型推導出的理論公式的正確性。
4 結論
(1)筒式M RC動態屈服應力扭矩在理論上趨于某一確定的極限值,即稱為臨界扭矩值, MRC聯軸器有效工作條件是,其負載扭矩值不得大于M RC固有的臨界扭矩值。
(2)筒式M RC輸出扭矩與輸入電流呈非線性變化關系,MRF聯軸器在低速區扭矩提升幅度較大,在高速區扭矩提升幅度較小。為獲得良好的扭矩提升性能,應盡量使MRC工作在低速區。
[1] Bansbach E E.Torque transfer apparatus using magnetorheological fluids:US,5,779,013[P]. 1998-1 2-08.
[2] Gopalswamy S,Linzell S M,Jones G L.Magnetorheological fluid clutch w ith minimized reluctance: US,5,845,752[P].1998-12-08.
[3] Hamp ton K.Magnetorheological fluid coup ling:US, 5,967,273[P].1999-10-19.
[4] Carlson J D.Magneto rheological brake w ith integrated flyw heel:US,6,186,290B1[P].2001-02-13.
[5] Kavlicoglu B,Go rdaninejad M F,Evrensel C A,et al.A high-torque magneto-rheological fluid clutch [C]∥Proceedings of SPIE Conference on Smart Materials and Structures.San Diego,2002.
[6] Usob Lee,Doh Y K,Nahmkeon H.Design analysis and experimental evaluation of an MR fluid cluth [J].Journal of Intelligent Material System s and Structures,1999,10(9):701-707.
[7] Huang J,Zhang JQ,Yang Y,et al.Analysis and design of a cylindrical magneto-rheological fluid brake [J].Journal of Materials Processing Technology, 2002,129:559-562.
Design and experimen tal study of cylindrical M RF coupling
L i M ingjie1,L u Yong1,L i Yourong1,Lu Guangtao1,Song Gangbing1,2
(1.Key Labo rato ry fo r Metallurgical Equipment and Control of M inistry of Education, Wuhan University of Science and Technology,Wuhan 430081,China;2.Smart Materials and Structures Labo ratory,Department of Mechanical Engineering,University of Houston,Houston,USA)
This paper discusses the influence of structural design,externalmagnetic field,input speed and torque on the driving torque of M RF coup ling.On the basis of Bingham model and theoretical computation,it concludes that the torque transmitting value of the cylindrical structure decreases tow ards a certain limit value in the intervals of its operation.Transm ission experiment equipment w as designed based on the deduced conclusion,and the evaluation of the output perfo rmance of cylindrical MRF coup ling confirm s that theoretical findings are consistent w ith the experimental results.
MRF;coup ling;cylinder structure
U 463.211+.1
A
1674-3644(2010)06-0624-04
[責任編輯 彭金旺]
2010-05-04
湖北省教育廳科學技術研究計劃重大項目(Z20091101).
李名杰(1985-),男,武漢科技大學碩士生.E-mail:limingjie8576@163.com
李友榮(1946-),男,武漢科技大學教授,博士生導師.E-mail:liyourong@wust.edu.cn
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55