用于視頻監(jiān)控的特定聲實(shí)時(shí)定位系統(tǒng)
2010-09-17 07:53:16曾春燕竇維蓓
電視技術(shù) 2010年1期
張 勇,曾春燕,竇維蓓
(清華大學(xué) 電子工程系,北京 100084)
1 引言
聲音定位技術(shù)有廣闊的應(yīng)用前景,比如多媒體安全監(jiān)控[1-2]。在多媒體安全監(jiān)控系統(tǒng)中,聲音定位系統(tǒng)可以估算出聲源方向,以此控制攝像頭的方向,可以提高攝像鏡頭對(duì)異常事件的捕捉能力,對(duì)室內(nèi)外環(huán)境進(jìn)行有效監(jiān)控。
常用的聲音定位技術(shù)主要有:基于TDoA的聲音定位技術(shù)[3-5],基于高分辨力的空間譜估計(jì)的聲音定位技術(shù)[6-7],基于神經(jīng)網(wǎng)絡(luò)的定位技術(shù),基于頭相關(guān)傳遞函數(shù)的聲音定位技術(shù)[8-10]。在這些定位技術(shù)中,后3種技術(shù)的復(fù)雜度相對(duì)比較高,而基于TDoA的聲音定位技術(shù)相對(duì)來(lái)說(shuō)比較簡(jiǎn)單,適合于低成本的實(shí)時(shí)系統(tǒng),而且性能能夠滿足大多數(shù)應(yīng)用場(chǎng)合的要求,所以應(yīng)用得比較多。
基于TDoA的定位算法的現(xiàn)有研究中,大多在努力提高定位的精度。但是,在實(shí)際的應(yīng)用中,除了希望提高定位精度,更希望系統(tǒng)只對(duì)特定的聲音進(jìn)行定位,忽略其他類(lèi)型的聲音。這可以大大提高系統(tǒng)的抗干擾能力,提高系統(tǒng)的實(shí)用性。
為此,筆者提出了一種對(duì)特定聲定位的系統(tǒng),它利用廣義互相關(guān)(GCC)方法估算聲音到達(dá)傳聲器(即麥克風(fēng))的時(shí)間差TDoA,以此確定聲源的方向;同時(shí)利用特定聲檢測(cè)技術(shù),只有檢測(cè)到特定聲時(shí),才輸出定位結(jié)果。特定聲定位系統(tǒng)框圖如圖1所示。
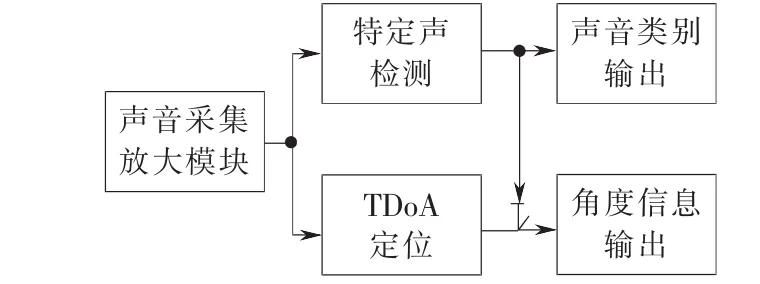
圖1 基于DSP的特定聲定位系統(tǒng)
在本系統(tǒng)中,首先對(duì)傳聲器的采集信號(hào)進(jìn)行預(yù)處理,然后對(duì)聲源方向進(jìn)行定位并且檢測(cè)聲音類(lèi)型,最后根據(jù)當(dāng)前幀的聲音類(lèi)別決定是否輸出定位結(jié)果。
2 基于TDoA的定位
基于TDoA的聲源定位如圖2所示,S表示聲源,m1和m2分別表示2個(gè)傳聲器,聲源相對(duì)于傳聲器連接線的方向角是θ,從S傳來(lái)的聲音到達(dá)這2個(gè)傳聲器的距離差是△d,這將帶來(lái)時(shí)間差△t。而且這個(gè)時(shí)間差△t和方向角θ密切相關(guān),不同的θ對(duì)應(yīng)不同的時(shí)間差,當(dāng)方向角θ是0°或者180°的時(shí)候,時(shí)間差最大。當(dāng)θ角是90°的時(shí)候,時(shí)間差是0。
2.1 廣義互相關(guān)計(jì)算TDoA
在圖2所示的模型中,可以用式(1)表示2個(gè)傳聲器的接收信號(hào)
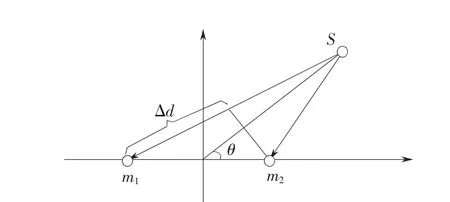
圖2 基于TDoA的聲源定位

式中: s(t)表示聲源信號(hào);m1(t)和 m2(t)表示 2 個(gè)傳聲器接收的信號(hào);n1(t)和 n2(t)表示 2 個(gè)傳聲器上獨(dú)立的噪聲,比如電噪聲;t0表示信號(hào)到達(dá)兩個(gè)傳聲器的時(shí)間延遲;α表示2個(gè)信號(hào)在幅度上的差別,假如傳聲器的距離不大,聲源到達(dá)2個(gè)傳聲器的路徑差別不是很大的時(shí)候,可以假定α=1。估算t0的簡(jiǎn)單有效方法就是互相關(guān)。一個(gè)信號(hào)的自相關(guān)函數(shù)在0點(diǎn)達(dá)到最大值,假如把一個(gè)信號(hào)延時(shí)t0后與原信號(hào)做互相關(guān),它的峰值將會(huì)延時(shí)t0。所以在式(1)中,估算出 m1(t)和 m2(t)的互相關(guān)函數(shù)的峰值點(diǎn),就知道了它們的延時(shí)t0。
然而,考慮到噪聲 n1(t)和 n2(t)或者室內(nèi)混響的影響,這種方法的定位性能不穩(wěn)定。為了提高各種復(fù)雜環(huán)境下聲音定位的性能,人們研究出了各種廣義互相關(guān)算法。
廣義互相關(guān)先對(duì)傳聲器接收信號(hào) m1(t),m2(t)進(jìn)行處理,然后再做相關(guān),如圖3所示。
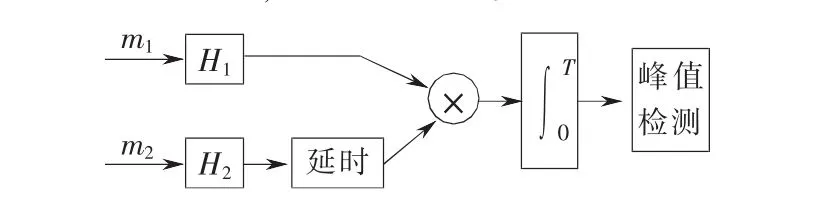
圖3 廣義互相關(guān)算法的示意圖[11]
圖3中的H1,H2表示2個(gè)濾波器的傳遞函數(shù)。濾波后的2個(gè)信號(hào)求互相關(guān)函數(shù),最后,進(jìn)行峰值檢測(cè),找到峰值點(diǎn),這就是 m1(t)和 m2(t)之間的相對(duì)延時(shí)。
不同的濾波器就對(duì)應(yīng)了不同的廣義互相關(guān)算法。文獻(xiàn)中,有的互相關(guān)算法是適用于噪聲環(huán)境下的定位,比如最大似然法(HT)[12],也有的算法適用于混響環(huán)境的定位,比如相位變換方法(PHAT)[11]。也有利用聲源本身的特點(diǎn)對(duì)聲源定位,比如利用人聲的基音[5]或者是線性預(yù)測(cè)誤差[13]。在混響環(huán)境中,人聲的頻譜會(huì)產(chǎn)生畸變,但是基音的頻率和線性預(yù)測(cè)誤差的時(shí)間規(guī)律不會(huì)改變,所以這些算法適合于混響環(huán)境。
在本文的系統(tǒng)中,要對(duì)室內(nèi)和室內(nèi)的特定聲方向進(jìn)行定位,分別采用PHAT和HT方法。PHAT方法的原理推導(dǎo)在文獻(xiàn)[11]中有詳細(xì)推導(dǎo),這里只給出計(jì)算公式

2.2 根據(jù)時(shí)間差確定聲源方向
根據(jù)TDoA和傳聲器排列的幾何位置定位方法主要有最大似然算法和閉式表達(dá)式法。閉式表達(dá)式法算法復(fù)雜度低,其性能在實(shí)際應(yīng)用中也能滿足要求,所以得到了廣泛的應(yīng)用。閉式表達(dá)式法主要有交叉雙曲線、球插值算法等。假定聲音是遠(yuǎn)場(chǎng)信號(hào),還可以用簡(jiǎn)單的方法得到聲源的方向角。遠(yuǎn)場(chǎng)信號(hào)示意圖如圖4所示。
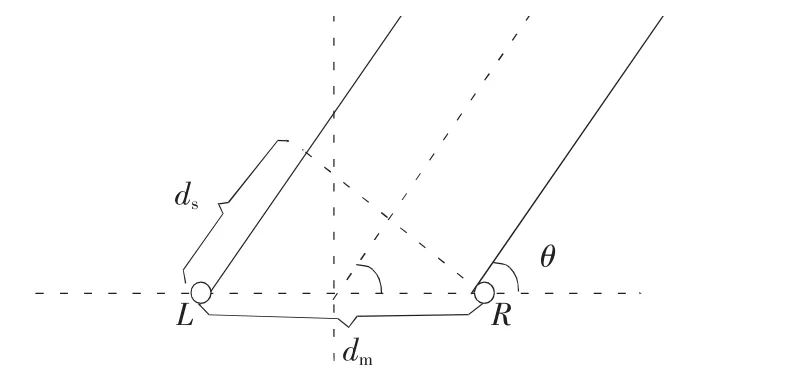
圖4 系統(tǒng)實(shí)現(xiàn)框架圖
圖4中,L,R代表2個(gè)傳聲器,dm是2個(gè)傳聲器的距離,ds是到達(dá)距離差(TDoA乘以聲波速度)。方向角θ為

計(jì)算出每一幀的角度后,還需要對(duì)異常結(jié)果進(jìn)行處理。在筆者提出的特定聲定位系統(tǒng)中,計(jì)算出了聲源的方向角,就可以控制攝像機(jī)轉(zhuǎn)向聲源方向,對(duì)該方向的場(chǎng)景進(jìn)行監(jiān)控。
3 特定聲的檢測(cè)
特定聲是指在特定的應(yīng)用場(chǎng)合中需要特別關(guān)注的聲音。比如在安全監(jiān)控中,槍聲的出現(xiàn)意味著有異常事件的發(fā)生,所以槍聲就是特定聲。
為了檢測(cè)特定聲,對(duì)現(xiàn)場(chǎng)采錄的信號(hào)進(jìn)行特征提取和分析,把當(dāng)前聲音進(jìn)行分類(lèi)。在本系統(tǒng)中,采用如圖5所示的二級(jí)分類(lèi)樹(shù)。
在第一級(jí)分類(lèi)中,以過(guò)零率作為特征,把聲音分為噪聲和非噪聲。在第二級(jí)分類(lèi)中,利用子帶能量等特征把非噪聲分為槍聲和人聲。過(guò)零率和子帶能量等特征的提取過(guò)程都不復(fù)雜,適合在DSP中實(shí)現(xiàn)。
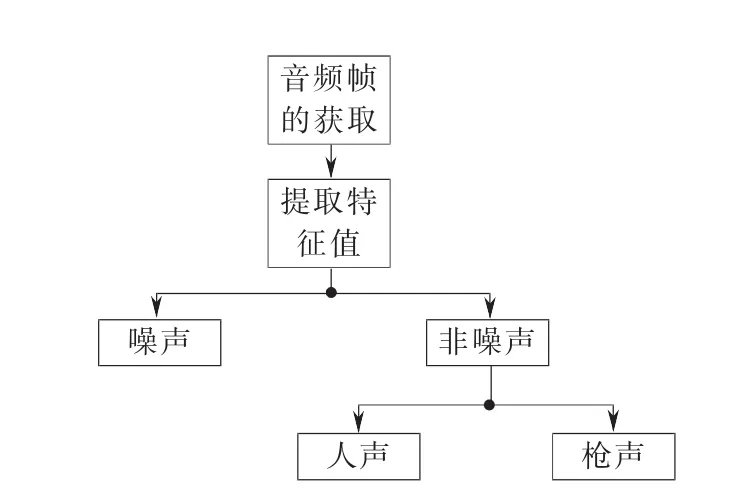
圖5 特定聲檢測(cè)用的分類(lèi)樹(shù)
4 DSP實(shí)時(shí)系統(tǒng)的構(gòu)建和試驗(yàn)結(jié)果
為了驗(yàn)證特定聲定位系統(tǒng)的精度以及特定聲檢測(cè)模塊對(duì)槍聲檢測(cè)的準(zhǔn)確性,構(gòu)建了一個(gè)基于ADI公司的Blackfin 16位定點(diǎn)處理器ADSP-BF561的特定聲定位實(shí)時(shí)系統(tǒng)。
4.1 實(shí)時(shí)定位系統(tǒng)的組成
實(shí)時(shí)定位系統(tǒng)由3個(gè)子系統(tǒng)組成,如圖1所示,聲音采集放大、數(shù)據(jù)處理和輸出結(jié)果的圖形顯示等子系統(tǒng)。
在聲音采集放大子系統(tǒng)中,使用2個(gè)型號(hào)是SMM310的硅微傳聲器,它們的間距是12.75 cm。硅微傳聲器的對(duì)稱(chēng)性比較好,信噪比64.5 dB,靈敏度-42 dB。由于傳聲器信號(hào)的輸出電壓范圍是微伏級(jí),而后級(jí)的AD轉(zhuǎn)換器輸入的動(dòng)態(tài)范圍是0~1 V,所以設(shè)計(jì)了一個(gè)用運(yùn)放組成的負(fù)反饋放大電路,它的放大倍數(shù)是100倍。
數(shù)據(jù)處理子系統(tǒng)中,采用ADI公司的ADSP-BF561 EZkit Lite,它有AD1836作為AD轉(zhuǎn)換器,采樣頻率可以高達(dá)96 kHz。其DSP處理器是ADI公司的Blackfin系列中的雙核16位定點(diǎn)處理器,2個(gè)獨(dú)立的DSP核,可以工作到750 MHz。系統(tǒng)中,一個(gè)核做輸出結(jié)果的圖形化顯示,另外一個(gè)核做聲音定位和特定聲檢測(cè)計(jì)算。
輸出結(jié)果的圖形化顯示是由東方迪碼公司的SSK-561完成,這是ADSP-BF561 EZkit Lite的接口擴(kuò)展板,板上的TFT顯示器是TopSun公司的TS35ND1501, 24位真彩色,分辨力是240×320。
圖6是筆者設(shè)計(jì)的定位結(jié)果輸出圖形界面,圖中半圓表示聲源定位的有效范圍,本系統(tǒng)只對(duì)傳聲器前方180°范圍的聲源定位。圓上的小球指示了當(dāng)前聲源的大致方向,下面的數(shù)字表示聲源的角度。左下方的圖標(biāo)表示當(dāng)前聲音類(lèi)別是槍聲,右下方圖標(biāo)表示當(dāng)前聲音是人聲。
4.2 誤差計(jì)算方法
本測(cè)試中,為了驗(yàn)證定位系統(tǒng)的估算角度與實(shí)際角度的偏差,測(cè)量了音箱相對(duì)于傳聲器的實(shí)際角度。但是,由于直接測(cè)量音箱到傳聲器陣列的絕對(duì)角度比較困難,筆者測(cè)試的是相對(duì)角度。把傳聲器固定后,音箱先后在2個(gè)不同的方位角播放聲音,系統(tǒng)估算出2個(gè)角度,它們之間的角度差就是相對(duì)角度。最大誤差是指定位系統(tǒng)估算出聲源角度,經(jīng)過(guò)排除孤立的異常結(jié)果后,各幀結(jié)果與均值的最大差值。
4.3 室內(nèi)測(cè)試結(jié)果
在室內(nèi)測(cè)試中,混響場(chǎng)空間參數(shù)為:長(zhǎng)7 m,寬4 m,高2.9 m。測(cè)試場(chǎng)中有很多矮隔板和電腦,混響時(shí)間約為120~180 ms。聲源是漫步者電腦音箱R1900T-Ⅲ,它在不同的方位角上不斷播放槍聲、人聲和其他聲音,調(diào)整音量,使信噪比在10 dB以上。音箱距離傳聲器陣列約4 m。表1是室內(nèi)槍聲的定位結(jié)果。特定聲檢測(cè)模塊對(duì)槍聲的檢出率是89.7%,準(zhǔn)確率是78.2%。

圖6 聲音定位系統(tǒng)的界面

表1 室內(nèi)槍聲定位的誤差均值和方差
4.4 室外測(cè)試結(jié)果
室外測(cè)試中,選擇校園內(nèi)一個(gè)交通路口旁邊一小塊空曠地作為測(cè)試場(chǎng)地,測(cè)試場(chǎng)中有汽車(chē)行駛的噪聲、大功率空調(diào)主機(jī)噪聲、輕軌和火車(chē)行駛噪聲,以及一些自然風(fēng)聲等。調(diào)整音箱的音量大小,使信噪比達(dá)到10 dB。測(cè)試方法和4.2節(jié)一樣,數(shù)據(jù)處理幀長(zhǎng)是1 000個(gè)采樣點(diǎn)。定位結(jié)果見(jiàn)表2。
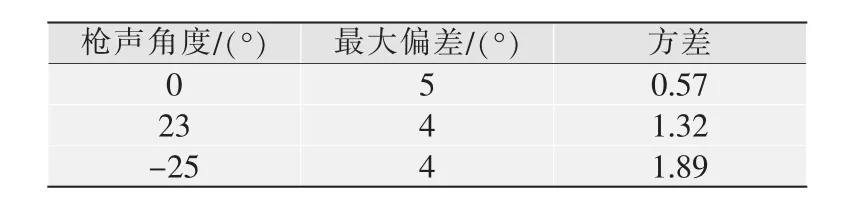
表2 室外槍聲的定位結(jié)果
從表2看出,在室外的聲音定位中,當(dāng)聲源偏離傳聲器正前方±30°以?xún)?nèi),定位偏差在5°以?xún)?nèi)。如果聲源偏離角度增大,這個(gè)偏差也會(huì)增大。特定聲檢測(cè)模塊對(duì)槍聲的檢出率是90%,好于室內(nèi)測(cè)試結(jié)果,而準(zhǔn)確率是75%,略差于室內(nèi)的測(cè)試結(jié)果。這是因?yàn)槭彝飧蓴_聲比較大,有時(shí)候會(huì)有很多干擾聲被識(shí)別成槍聲。
5 小結(jié)
筆者提出的結(jié)合基于TDoA的聲音定位和特定聲檢測(cè)的特定聲方向定位系統(tǒng)可以實(shí)時(shí)地進(jìn)行特定聲的檢測(cè)和定位,它的抗干擾能力也較強(qiáng)。當(dāng)它的輸出設(shè)備是TFT顯示器的時(shí)候,可以直觀顯示聲源的方向;如果用本定位系統(tǒng)的輸出角度控制攝像機(jī)云臺(tái),攝像機(jī)就能夠及時(shí)轉(zhuǎn)向并跟蹤特定聲聲源方向,有效提高視頻監(jiān)控的有效性。在沒(méi)有檢測(cè)到特定聲的時(shí)候,如果該系統(tǒng)關(guān)閉攝像機(jī),就可以在很大程度上降低視頻監(jiān)控系統(tǒng)的能耗。
:
[1]YITENG H,BENESTY J,ELKO G W.Passive acoustic source localization for video camera steering[C]//Proc.2002 IEEE International Conference on Acoustics, Speech, and Signal.[S.l.]:IEEE Press,2000:909-912.
[2]CLAVEL C,EHRETTE T,RICHARD G.Events detection for an audio-based surveillance system [C]//IEEE Conference on Multimedia and Expo 2005.[S.l.]:IEEE Press,2005:1308-1309.
[3]CHAN Y, RILEY J, PLANT J.A parameter estimation approach to time-delay estimation and signal detection[J].IEEE Transactions on Acoustics, Speech, and Signal Processing, 1980, 28(1):8-16.
[4]STEPHENNE A,CHAMPAGNE B.Cepstral prefiltering for time delay estimation in reverberant environments[EB/OL].[2009-06-02].http://eprints.kfupm.edu.sa/29439.
[5]BRANDSTEIN,M S.A pitch-based approach to time-delay estimation of reverberant speech[EB/OL].[2009-06-02].http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=625637.
[6]ARGENTRERI S,DANES P.Broadband variations of the MUSIC highresolution method for sound source localization in robotics[EB/OL].[2009-06-02].http://ieeexplore.ieee.org/xpl/freeabs_all.jsp?arnumber=4399422.
[7]LEON D F A,MARCIANO J J S.Source localization using music in a multipath environment[EB/OL].[2009-06-02].http://d.wanfangdata.com.cn/NSTLHY_NSTL_HY14773667.aspx.
[8]KEYROUZ F,MAIER W,DIEPOLD K.A novel humanoid binaural 3D sound localization and separation algorithm[EB/OL].[2009-06-02].http://d.wanfangdata.com.cn/NSTLHY_NSTL_HY17814078.aspx.
[9]ROMAN N,DELIANG W,BROWN G J.Speech segregation based on sound localization[EB/OL].[2009-06-02].http://www.cse.ohio-state.edu/~dwang/papers/RWB.jasa03.pdf.
[10]FAKHEREDINE K,KLAUS D.An enhanced binaural 3D sound localization algorithm[EB/OL].[2009-06-02].http://ieeexplore.ieee.org/xpl/freeabs_all.jsp?arnumber=4042325.
[11]KNAPP C,CARTER G.The generalized correlation method for estimation of time delay[J].IEEE Trans.Signal Acoustics, Speech, and Signal Processing, 1976,24(4):320-327.
[12]VALENZISE G,GEROSA L,TAQLIASACCHI M,et al.Scream and gunshot detection and localization for audio-surveillance systems[EB/OL].[2009-06-02].http://www.citeulike.org/user/tiboeret/article/5095282.
[13]CHENG E, BURNETT I, RITZ C.Using spatial audio cues from speech excitation for meeting speech segmentation[EB/OL].[2009-06-02].http://ieeexplore.ieee.org/iel5/4128765/4129618/04129778.pdf?arnumber=4129778.
猜你喜歡
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
鴨綠江(2021年35期)2021-04-19 12:24:18
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
