等離子割炬初始高度自動定位研究
2010-11-14 08:08:16補家武
電焊機 2010年1期
應 坤,補家武,周 敏
(中國地質大學 機電學院,湖北 武漢 430074)
等離子割炬初始高度自動定位研究
應 坤,補家武,周 敏
(中國地質大學 機電學院,湖北 武漢 430074)
針對等離子割炬初始高度定位方式存在的一些問題,設計了兩種定位方式:一是利用鋼板導電性進行接觸定位,在電路中利用共模電感等元件來增強抗干擾性能;二是采用限位開關進行初始定位,割炬調高體采用扭輪摩擦傳動機構,將限位開關合理地安裝在該調高體內,簡化定位機構結構。對比分析了所設計的兩種定位方式與目前國內常用的幾種定位方式,結果表明,限位開關定位方式更具經濟性和實用性。
等離子割炬;初始高度定位;限位開關;扭輪摩擦
0 前言
在制造業中,采用等離子切割機加工金屬板材已越來越普遍,其切割效果和經濟性也倍受關注。
在等離子切割機起弧前應對割炬高度進行初始定位,即使割炬處于鋼板上方一個確定的高度。割炬自動調高裝置是通過電機傳動使割炬進行升降,從而調節割炬頭與鋼板的距離。該距離的準確性不僅影響等離子起弧能否建立,還會影響初始切割質量。
文獻[1]概述了初始高度定位方式可采用接觸式和非接觸式。接觸式是調高裝置接觸到鋼板;非接觸式是通過接近開關或電容式傳感器來感應鋼板,調高體不接觸鋼板。據調查,目前等離子割炬初始高度定位方式有三種:傳感器接觸定位方式、接近開關定位方式、升降電機電流檢測定位方式。
通過分析這幾種定位方式的原理和特點,它們或多或少存在著一定的局限性。因此,本研究設計了鋼板導電性的接觸定位方式和限位開關定位方式。
1 鋼板導電性的接觸定位
1.1 電路設計與分析
電路設計原理是利用具有導電性的金屬割炬頭與鋼板接觸實現割炬初始定位,如圖1所示。主要由共模電感、磁珠、繼電器、光耦PC817等元件組成。導線在割炬和鋼板上的安裝示意如圖2所示,圖1中信號線signal1與圖2中割炬上的鋼片套環3相連(套環緊套于割炬,并與割炬接觸良好);繼電器常閉觸點與信號線signal2相連,與鋼板上鋼夾相連的絕緣導線和圖1中兩腳插座JP3的2腳相連。自動定位過程為:割炬體下降(先加速后減速運行),當割炬頭接觸到鋼板時,光耦PC817左端電路形成回路,光耦右端導通,單片機的P2.2腳由高電平變為低電平;單片機P1.7輸出低電平執行繼電器觸點切換,使觸點與GND-E相連;單片機通過P2.0(該P2.0口控制電機旋轉方向)和P2.1口輸出脈沖控制電機驅動器來使電機反轉,帶動割炬以一定的速度(6~10 mm/s)勻速上升到指定高度,此時完成割炬初始高度定位。

圖1 接觸定位硬件設計原理

圖2 導線在割炬和鋼板上的安裝示意
由于干擾源較多,經過試驗,該電路設計應考慮以下方面:
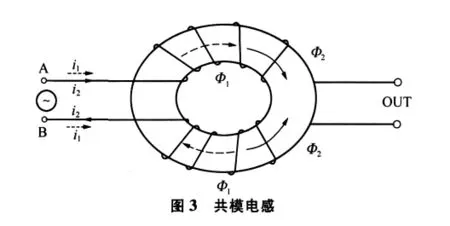
電路中采用共模電感、磁珠、續流二極管N4008來增強電路的抗干擾性能。共模電感工作過程如圖3所示,當共模電感輸入端A、B加兩個電流變化相同、幅值相等的信號時(電流i1,磁通Φ1),磁通因方向相同而互相加強,每一線圈的電感值為單獨存在時的兩倍,能較好地抑制高壓的信號,接線方式如圖1所示。磁珠能有效抑制高頻噪聲和尖峰干擾,也能吸收靜電脈沖。經過多次修改和調試,該電路具有較好的抗干擾能力。
1.2 注意事項
通過現場調試,鋼板導電性的接觸定位方式是可行的,但也有一定的局限性。
(1)割炬與鋼板接觸后,抗干擾性能較好。初始高度定位完成后,需將繼電器的觸動切換到引腳GNDE,以免起弧后產生的高弧壓(一般大于100 V)損壞電路板。
(2)割炬下降速度緩慢,一般為6~10 mm/s,以免對割炬頭損壞。
(3)加工薄鋼板時,割炬下降速度為2~4 mm/s,以免初始定位時割炬頭使鋼板變形。
(4)當鋼板銹蝕嚴重時,定位之前必須清除鋼板表面的銹斑。
2 限位開關的割炬初始高度定位
2.1 割炬初始高度定位原理
割炬調高體采用扭輪摩擦的傳動方式來實現割炬的升降。扭輪摩擦傳動是摩擦傳動與螺旋傳動相結合的傳動方式,扭輪摩擦傳動機構主要由光軸、三個圓錐滾子軸承、軸承座等部件組成。割炬調高體機械結構如圖4所示,電機1通過滑塊聯軸器3帶動光軸4轉動,軸承座5通過光軸4與滾珠軸承之間的扭輪摩擦實現上下移動,從而帶動割炬傳動件11在圓柱形導桿2上移動,進而帶動割炬升降。
圖4中限位開關安裝于小薄鋼板6上,小薄鋼板6通過緊定螺釘固定于軸承座5的側面;薄板9固定于軸承座下部,六角螺栓8穿過薄板9的孔(間隙1 mm)與割炬傳動件11相連,套筒7穿過薄板孔套于六角螺栓8上,套筒下端部與矩形平板10上表面相接觸。
定位原理:電機正轉,割炬下降,當碰到鋼板后,傳動件停止下降,此時軸承座5、薄板9與限位開關12會繼續向下移動,在套筒7的外壁上穿梭;當限位開關12的薄片與矩形平板10的上表面相碰使限位開關閉合時,單片機P1.3端口輸入低電平(電路見5),單片機輸出控制信號,步進電機反轉,軸承座和薄板8一起上升,割炬傳動件11在自身重力(約20 N)作用下仍與鋼板接觸,直至軸承座上升H=10mm時,薄板上表面與六角螺栓頭部8接觸;在薄板與六角螺栓頭部的作用力下,帶動傳動件上升,將割炬上升到指定高度,完成割炬初始高度定位。


圖5 限位開關硬件接口
2.2 軟件編程
若要較準確地定位高度,需確定導程ly(電機帶動光軸轉動一圈,軸承座移動的距離)。
光軸與滾珠軸承間傳動示意如圖6所示,滾珠軸承軸線與光軸軸線形成一定角度θ=5°。當步進電機勻速轉動(光軸角加速度α=0)[3]時,三個滾珠軸承受光軸摩擦力產生速度v,將v分解為軸向速度vl和徑向速度vr,導程ly和軸承座移動速度vl表達式為

式中 π為圓周率;R為光軸半徑;n為步進電機轉速;θ為滾珠軸承軸線與光軸軸線間的夾角。
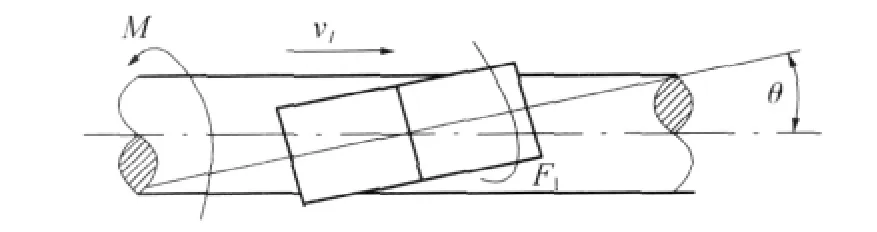
圖6 光軸與滾珠軸承間傳動示意
軸承座移動速度vl=10 mm/s為已知,則由式(2)可確定步進電機勻速轉速n,進而確定單片機向步進驅動器發的脈沖數和頻率。軟件編程算法流程如圖7所示。

圖7 軟件編程算法流程
2.3 兩方案對比分析
兩方案對比分析如表1所示。
由表1可知,方案1與方案2的升降調高方式都采用了扭輪摩擦調高機構,初始高度定位精度±0.1 mm(滿足初始定位要求),較絲杠調高方式更為經濟。方案2適用范圍更廣,電路設計簡單,抗干擾性能好。
3 幾種定位方式比較
傳感器接觸式定位方式、接近開關定位方式、升降電機電流檢測定位方式與研究中的兩種方式的定位原理及適用范圍對比如表2所示。
由表2可知,升降電機電流檢測定位方式適用于較厚的鋼板初始定位,但此方式對割炬有損傷,一般情況下不采用。文獻[4]、[5]設計的傳感器接觸式定位方式與文獻[6]設計的接近開關定位方式類似,都是單獨設計初始定位機械夾具,再將機械夾具安裝于割炬調高體上;都是采用通過機械夾具來使傳感器感應鋼板,定位完成后將夾具上的感應裝置向上提升的定位方式。限位開關定位方式是在割炬調高體內添加限位開關來定位。限位開關定位方式的整體機械裝置設計和電路設計較簡單,成本低,能滿足要求。

表1 兩方案對比分析

表2 幾種定位方式比較
[1]尹明康.等離子弧割炬初始高度設定裝置[J].造船技術,2002(3):23.
[2]戴一帆,李圣怡.扭輪摩擦驅動系統研究[J].國防科技大學學報,1999,21(2):85-88.
[3]劉 波,劉 賓.壓力可調式扭輪摩擦傳動機構研制[J].制造技術與機床,2005(8):47-49.
[4]何曉陽.等離子割炬初始定位裝置[P].中國:200710133193.8,2008.3.12.
[5]高龍軍.數控等離子切割機初始定位裝置[P].中國:200820 117223.6,2009.6.24.
[6]趙么子,孫 兵.切割機割炬初始定位裝置[P].中國:2004 20025389.7,2005.4.13.
Research for automatic positioning of initial height on plasma cutting torch
YING Kun,BU Jia-wu,ZHOU Min
(Faculty of Mechnical&Electronic Information,CUG,Wuhan 430074,China)
With regard to some problem of initial height positioning on plasma cutting torch,this paper has introduced two ways of initial height positioning.One way is to use conductivity of armor plate to make location,the designed circuit has used the commonmode inductor and others to enhance anti-jamming performance.Another way is to use the limit switch for positioning,and lifting device of cutting torch has used the twist-roller frictional drive.Meanwhile,the limit switch is integrated into the lifting device,making this positioning mechanism designed to be simple.Finally,the paper have done a comparative analysis between two ways referred to the paper and the current domestic positioning ways,and have concluded that such limit switch positioning mode have been more economical and practical.
plasma cutting torch;initial height positioning;limit switch;twist-roller frictional
TG483
A
1001-2303(2010)01-0062-04
2009-11-30
應 坤(1986—),男,湖北荊州人,在讀碩士,主要從事機電一體化技術及應用、數控系統研究等工作。