基于相位差分的 GPS/GLONASS組合定位算法研究
2010-11-15 08:43:10孫洪瑞沈云中周澤波虞祖培
測(cè)繪工程 2010年6期
孫洪瑞,沈云中,周澤波,虞祖培
(1.中交第三航務(wù)工程勘察設(shè)計(jì)院有限公司,上海 200032;2.同濟(jì)大學(xué) 測(cè)量與國(guó)土信息工程系,上海 200092;3.電子科技大學(xué)空天技術(shù)研究院,四川 成都 610054)
基于相位差分的 GPS/GLONASS組合定位算法研究
孫洪瑞1,沈云中2,周澤波3,虞祖培1
(1.中交第三航務(wù)工程勘察設(shè)計(jì)院有限公司,上海 200032;2.同濟(jì)大學(xué) 測(cè)量與國(guó)土信息工程系,上海 200092;3.電子科技大學(xué)空天技術(shù)研究院,四川 成都 610054)
針對(duì)短基線詳細(xì)研究 GPS/GLONASS組合定位函數(shù)模型,引入一種簡(jiǎn)單易行的模糊度求解方法以正確固定 GLONASS模糊度,最后筆者自編軟件實(shí)現(xiàn)基于相位差分的 GPS/GLONASS高精度組合定位,并采用實(shí)際數(shù)據(jù)驗(yàn)證其正確性和有效性。結(jié)果表明:GPS/GLONASS組合系統(tǒng)優(yōu)于單系統(tǒng),采用相位觀測(cè)值可獲得高精度定位結(jié)果。
GPS;GLONASS;相位差分;組合定位
全球?qū)Ш叫l(wèi)星系統(tǒng)(GLO bal’naya NA vigatsionnaya S putnikovaya S istema or GLO bal NA vigation S atellite S ystem,簡(jiǎn)稱 GLONASS)是前蘇聯(lián)(現(xiàn)俄羅斯)于1976年開始建立的第二個(gè)全球衛(wèi)星定位系統(tǒng)。由于受俄羅斯經(jīng)濟(jì)衰退的影響,GLONASS衛(wèi)星缺乏有效的維護(hù)和更新,以至于到2001年時(shí)只有7顆衛(wèi)星可用,于2001年8月啟動(dòng) GLONASS的恢復(fù)和更新計(jì)劃。目前 GLONASS可用衛(wèi)星已達(dá)17顆(見圖1),預(yù)計(jì)于2010年完成星座的24顆布設(shè)。此外,俄羅斯已經(jīng)決定將星座的衛(wèi)星數(shù)目增至30顆,并增加CDMA信號(hào),以便與 GPS、GAL ILEO進(jìn)行組合定位。與 GPS不同,GLONASS采用頻分多址(Frequency Division M ultip le Address,FDMA)的方式識(shí)別衛(wèi)星信號(hào)。GLONASS衛(wèi)星也是利用兩個(gè)L波段頻率發(fā)射載波無線電信號(hào),即L 1和L 2載波,相應(yīng)的頻率分別為 fL1=(2 828+K)×0.562 5 M Hz和 fL2=(282 8+K)×0.437 5 M Hz,K=-7~6。同一顆衛(wèi)星的兩個(gè)頻率之間滿足fL1/fL2=9/7的關(guān)系(GPS的兩個(gè)頻率滿足 fL1/fL2=77/60)。GLONASS衛(wèi)星上的載波也調(diào)制了兩種偽隨機(jī)噪聲碼:S碼(即 GPS的C/A碼)和 P碼。此外,俄羅斯對(duì) GLONASS系統(tǒng)采用了軍民合用、不加密的開放政策,即普通用戶均可同時(shí)使用 P1、P2和L1、L 2民用信號(hào)。GLONASS與 GPS系統(tǒng)的差異具體可參見文獻(xiàn)[1-2]。
采用GPS/GLONASS組合定位主要有以下優(yōu)點(diǎn):①能選擇幾何配置更好的衛(wèi)星定位,提高定位精度;②減少衛(wèi)星信號(hào)被遮擋而引起的衛(wèi)星不足的影響,特別是多山或城市地區(qū);③使用多顆衛(wèi)星,多余的觀測(cè)增加了定位的可靠性(見圖2);④使用多衛(wèi)星導(dǎo)航系統(tǒng),就會(huì)削弱對(duì)單一系統(tǒng)的依賴性;⑤可及時(shí)識(shí)別和停用故障衛(wèi)星;此外,可有效地減弱美國(guó)限制性政策的影響(如實(shí)施 SA、AS政策),提高衛(wèi)星導(dǎo)航定位的可用性、可靠性、精確性及系統(tǒng)的自主完備性監(jiān)測(cè)(RA IM)能力。
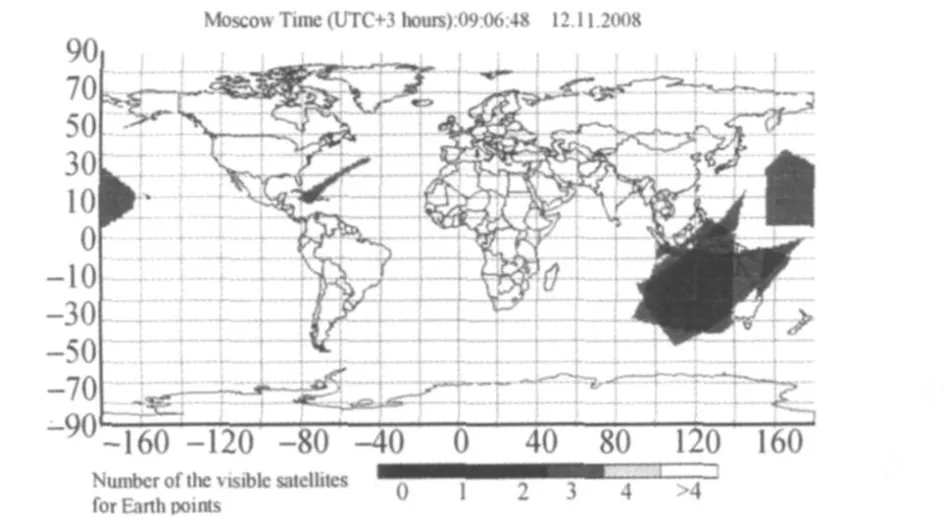
圖1 GLONASS星座當(dāng)前的衛(wèi)星可見數(shù)目
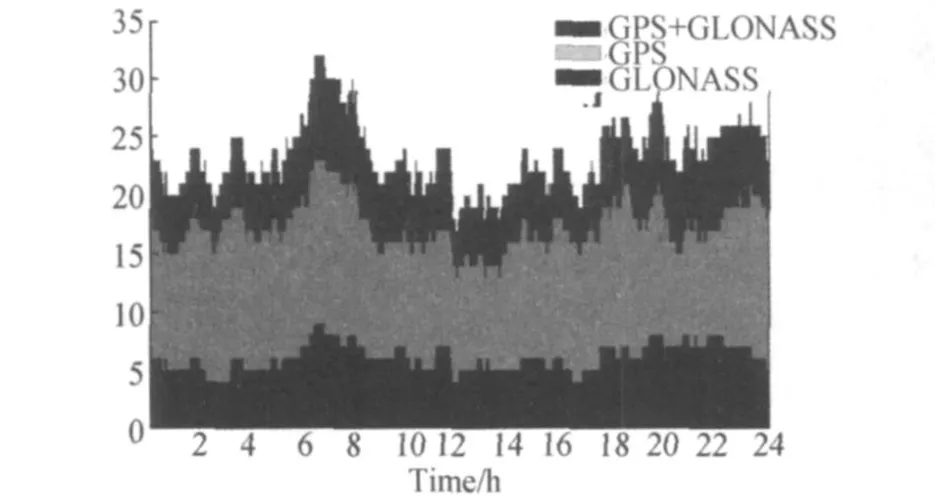
圖2 某IGS站 GPS/GLONASS衛(wèi)星分布圖
組合定位是衛(wèi)星定位未來的重要發(fā)展方向。國(guó)外已經(jīng)開發(fā)出相應(yīng)的軟、硬件產(chǎn)品,而且已經(jīng)有一定的研究成果,但并不公開其具體的、實(shí)際性的技術(shù)細(xì)節(jié),只是給出結(jié)果及必要的介紹[3]。為此,本文針對(duì)短基線首先詳細(xì)研究了 GPS/GLONASS組合定位函數(shù)模型,并引入了一種簡(jiǎn)單易行的模糊度求解方法以正確固定 GLONASS模糊度。最后筆者采用自編軟件實(shí)現(xiàn)了基于相位差分的 GPS/GLONASS高精度組合定位算法,并采用實(shí)際算例驗(yàn)證了本文算法的正確性和有效性。
1 GLONASS函數(shù)模型
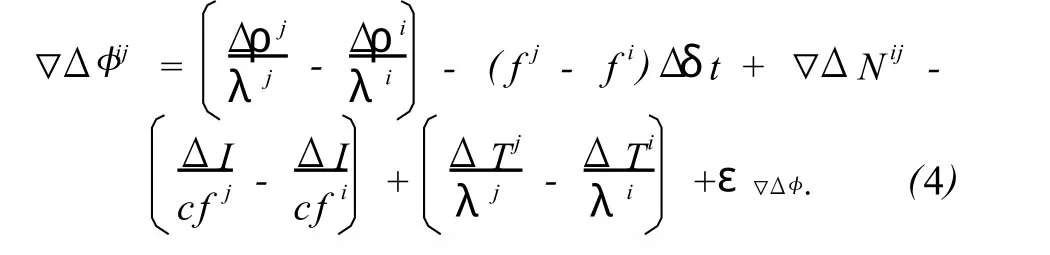
GLONASS的觀測(cè)方程模型與 GPS類似,但在系統(tǒng)的參考時(shí)間、衛(wèi)星發(fā)射頻率與識(shí)別方式等方面有所差異,則其偽距與相位的非差觀測(cè)方程為[4]
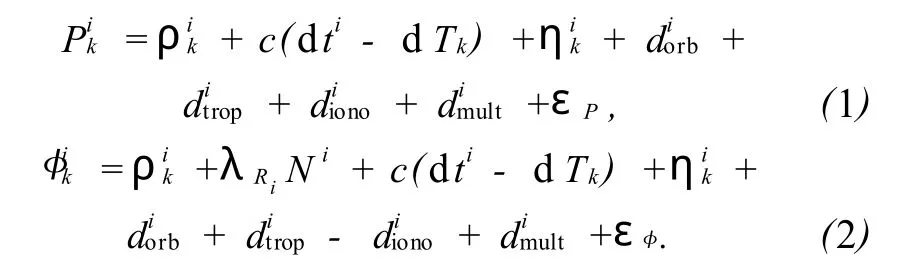
式中 :Pik,φik分別表示測(cè)站k至衛(wèi)星i的偽距和相位(單位:周)觀測(cè)值,ρik表示衛(wèi)地真實(shí)的幾何距離,c表示光速,d ti為衛(wèi)星鐘差,d Tk表示接收機(jī)鐘差,ηik表示與衛(wèi)星和接收機(jī)相關(guān)的硬件延遲,doirb、dtirop、diiono、dmiult分別表示衛(wèi)星軌道誤差,對(duì)流層延遲、電離層延遲、多路徑效應(yīng),εP與εφ分別為碼和相位噪聲。相應(yīng)地,站間單差的觀測(cè)方程可寫為

在此基礎(chǔ)上繼續(xù)一次星間差分,GLONASS雙差觀測(cè)方程可表示為
由于差分不僅消除了衛(wèi)星鐘差與接收機(jī)鐘差的影響,還大大削弱了電離層延遲與對(duì)流層延遲的影響。下文主要研究采用差分模式進(jìn)行 GPS/GLONASS組合差分定位解算。
2 GPS/GLONASS整周模糊度解算
由于GLONASS衛(wèi)星采用頻分多址的方式識(shí)別,不同衛(wèi)星間的載波相位頻率不同,其雙差模糊度參數(shù)不具有整周特性,必須采取一定的變換才可以求解雙差模糊度的整周解,故 GLONASS模糊度的處理方法較 GPS更為復(fù)雜。目前國(guó)內(nèi)外關(guān)于GLONASS模糊度分解的算法也有不少[5-8]。模糊度的正確求解是獲得高精度 GPS/GLONASS基線向量解的先決條件和關(guān)鍵問題。模糊度的正確求解取決于觀測(cè)值的質(zhì)量和衛(wèi)星的數(shù)量與分布。載波相位信息是時(shí)間的函數(shù),與衛(wèi)星的運(yùn)動(dòng)直接相關(guān),即使在良好的觀測(cè)條件下,時(shí)間也是模糊度求解成功與否的關(guān)鍵因素。模糊度搜索方法有很多,比如:最小二乘搜索法、快速模糊度分解法、模糊度函數(shù)法,LAMBDA方法以及ARCE算法等[9],其中以去相關(guān)技術(shù)為核心的LAMBDA方法最為經(jīng)典。本文主要參考韓紹偉博士于1999年提出的算法進(jìn)行短基線的 GLONASS模糊度解算方法[8],結(jié)合LAMBDA以正確固定GPS整周模糊度。
1)采用 GPS/GLONASS偽距觀測(cè)方程(5)、(6)計(jì)算接收機(jī)鐘差參數(shù)。

其中,GPS采用偽距觀測(cè)雙差觀測(cè)方程,GLONASS采用偽距單差觀測(cè)方程,它們主要用來解算接收機(jī)鐘差單差Δδt。值得注意的是,接收機(jī)鐘差參數(shù)必須每個(gè)歷元解算一個(gè)。
2)利用 GLONASS單差相位觀測(cè)方程探測(cè)GLONASS基準(zhǔn)星周跳。需要指出,GLONASS單差相位觀測(cè)方程基準(zhǔn)星i周跳無需對(duì)其修復(fù)。
3)GPS/GLONASS雙差相位觀測(cè)方程用來求解模糊度并解算測(cè)站近似坐標(biāo)。
綜合式(5)、(6)與式(10)解算 GLONASS雙差模糊度,但是不能用其解算測(cè)站精確坐標(biāo),否則誤差較大[8]。因?yàn)椴捎蒙鲜角蠼饽:冗^程中,一部分會(huì)被位置參數(shù)所吸收,從而導(dǎo)致此時(shí)位置參數(shù)精度偏低[3]。
4)采用式(11)(單位:m)以精確解算測(cè)站位置參數(shù)。
對(duì)上式求解時(shí),需將基準(zhǔn)星 i的單差模糊度ΔNi視為待估參數(shù)。
特別地,對(duì)于短基線而言,忽略電離層和對(duì)流層延遲的影響以后,式(10)、(11)可簡(jiǎn)化為式(12)、(13),模型變得更加簡(jiǎn)單而準(zhǔn)確。
3 GPS/GLONASS整周模糊度解算流程
可將 GPS/GLONASS模糊度解算歸納為以下3個(gè)步驟,流程如圖3所示。
1)利用 GPS/GLONASS偽距觀測(cè)方程式(5)和(6)得到兩個(gè)接收機(jī)鐘差之差Δδt和測(cè)站的近似坐標(biāo);
2)將Δδt代入式(10)或式 (12),用 LAMBDA方法解算雙差模糊度▽?duì);
3)當(dāng) GLONASS基準(zhǔn)星無周跳或者已經(jīng)探測(cè)修復(fù)之后,將▽?duì)代入式(11)或式(13)解算 GLONASS參考星的單差模糊度ΔNi和測(cè)站精確坐標(biāo)。
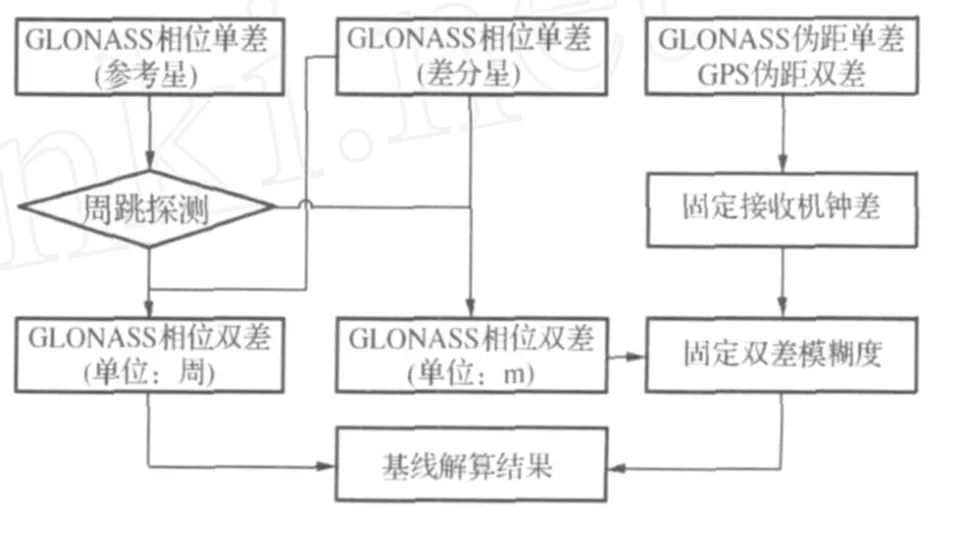
圖3 GLONASS模糊度解算流程
4 算例分析
為了驗(yàn)證本文提出方法的正確性和有效性,筆者根據(jù)上述理論自編軟件對(duì)實(shí)測(cè)數(shù)據(jù)進(jìn)行了高精度精密定位解算。實(shí)驗(yàn)數(shù)據(jù)來源于2008-03-20在同濟(jì)大學(xué)校園內(nèi)靜態(tài)觀測(cè)的一條超短基線數(shù)據(jù),基線相關(guān)信息如表1所示。
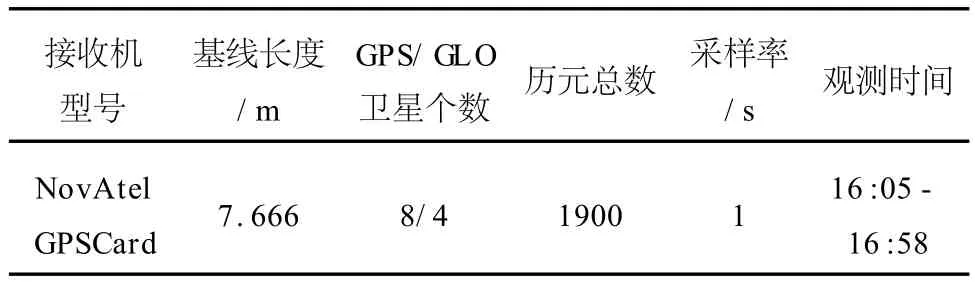
表1 實(shí)驗(yàn)所用基線的相關(guān)信息
將整個(gè)觀測(cè)數(shù)據(jù)分成9個(gè)時(shí)段(每時(shí)段歷元數(shù)為100)。其間保持同步鎖定4顆 GLONASS衛(wèi)星和8顆 GPS衛(wèi)星,共計(jì)12顆可用衛(wèi)星。相位解算結(jié)果如圖4所示。
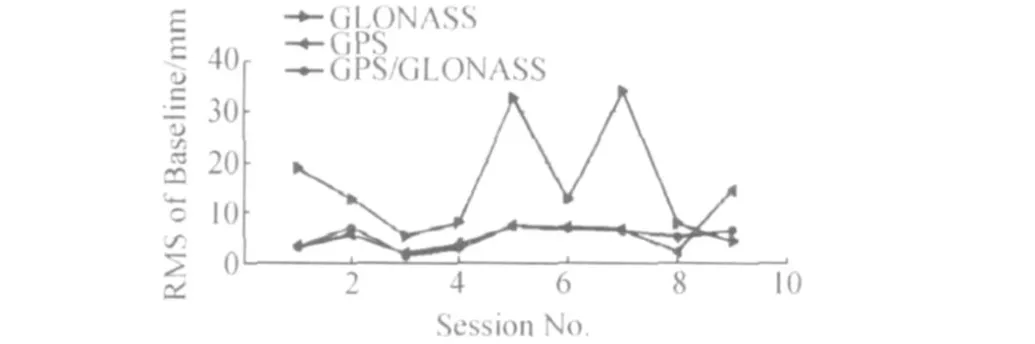
圖4 GPS、GLONASS以及 GPS/GLONASS相位差分定位結(jié)果比較
由圖4可知,GPS相位差分定位精度均在1 cm以內(nèi),可達(dá)到毫米級(jí)的高精度定位;GLONASS相位差分定位的精度在4 cm以內(nèi),有些時(shí)段的精度可達(dá)毫米級(jí),較 GPS定位精度低,影響 GLONASS定位精度的主要因素是 GLONASS衛(wèi)星之間的硬件延遲項(xiàng)無法消除,此外也跟 GLONASS衛(wèi)星個(gè)數(shù)較少、圖形強(qiáng)度較弱有關(guān)。而 GPS/GLONASS組合定位的結(jié)果與 GPS單系統(tǒng)定位結(jié)果基本相當(dāng),但其穩(wěn)定性和可靠性較 GPS均有所提高[10-12]。圖5為本文GPS/GLONASS相位差分定位的程序設(shè)計(jì)模塊示意圖。

圖5 GPS/GLONASS相位差分定位程序設(shè)計(jì)
5 結(jié)束語
本文針對(duì)短基線詳細(xì)研究了 GPS/GLONASS組合定位函數(shù)模型,引入了一種簡(jiǎn)單易行的模糊度求解方法以正確固定 GLONASS模糊度,最后筆者自編軟件實(shí)現(xiàn)了基于相位差分的 GPS/GLONASS高精度組合定位,并采用實(shí)際數(shù)據(jù)驗(yàn)證了其正確性和有效性。結(jié)果表明:①GLONASS相位差分定位的精度低于 GPS,其原因可能是受硬件延遲項(xiàng)的影響,具體尚待更進(jìn)一步的研究;②GPS/GLONASS組合系統(tǒng)優(yōu)于單系統(tǒng),采用相位觀測(cè)值可獲得高精度定位結(jié)果。
[1]孫洪瑞,沈云中,周澤波.GPS/GLONASS組合點(diǎn)定位模型及其精度分析[J].測(cè)繪工程,2009,18(1):8-10.
[2]高星偉,葛茂榮.GPS/GLONASS單點(diǎn)定位的數(shù)據(jù)處理[J].測(cè)繪通報(bào),1999(4):8-9.
[3]高星偉.GPS/GLONASS數(shù)據(jù)處理方法研究及軟件編制[D].北京:中國(guó)測(cè)繪科學(xué)研究院,1999.
[4]ROSSBACH U.Positioning and navigation using the Russian satellite system GLONASS:[Ph.D Dissertation].Germany:University of M unich,2000.
[5]ALFRED LEICK.Aspects of GLONASS carrier-phase differencing.GPS Solution,1998,2(1):36-41.
[6]JWANG.An app roach to GLONASS ambiguity resolution[J].Journal of Geodesy,2000(74):421-430.
[7]JWANG,C RIZOS,M P STEWART,et al.GPS and GLONASS Integration:Modeling and Ambiguity Resolution Issues[J].GPS Solution,2001(5):55-64.
[8]S HAN,L W DA I,CHRIS RIZOS.A new data p rocessing strategy for combined GPS/GLONASS carrier phase-based positioning[J].12th Int.Tech.Meeting of the Satellite Division of the U.S.Inst.of Navigation,Nashville,Tennessee,1999:1619-1627
[9]李博峰,沈云中.附有約束條件的 GPS模糊度快速解算[J].武漢大學(xué)學(xué)報(bào):信息科學(xué)版,2009,34(1):117-120.
[10]高星偉,李毓麟,葛茂榮.GPS/GLONASS相位差分的數(shù)據(jù)處理方法[J].測(cè)繪科學(xué),2004,29(2):22-24.
[11]CARINEBRU YN INX.Comparing GPS-only w ith GPS+GLONASS positioning in a regional permanent GNSS network[J].GPS Solution,2007,11:97-106.
[12]CEFALO RAFFAELA,GA TTIMARCO.Dual frequency GPS+GLONASSmeasurement in the static relative position[J].2000,59:391-403.
Research on GPS/GLONASS integrated positioning algorithm based on different carrier-phase
SUN Hong-rui1,SHEN Yun-zhong2,ZHOU Ze-bo3,YU Zu-pei1
(1.CCCC.Third Harbo r Consultants Co.,L td,Shanghai200032,China;2.Dep t.of Survey and State Land Information Engineering,Tongji University,Shanghai 200092,China;3.Institute of Astronautics&Aeronautics,UESTC,Chengdu 610054,China)
The paper detailedly investigated the functional model of GPS/GLONASS for short baselines.Then a simp le and p racticed method for GLONASS ambiguity resolution was introduced.Finally,the GPS/GLONASS integration positioning p rogram was realized w ith MA TLAB language and its efficiency was validated w ith real data.The result show s that GPS/GLONASS integration system is superior to single system and can achieve the high accuracy of positioning w ith carrier-phase measurement.
GPS;GLONASS;differenced carrier-phase;integrated positioning
P228.4
A
1006-7949(2010)06-0020-04
2009-12-30
孫洪瑞(1984-),男,助理工程師,碩士.
[責(zé)任編輯劉文霞]
