毫米波/紅外復合制導目標融合跟蹤算法
2010-12-03 02:53:16李相平王光復謝志敏
制導與引信 2010年1期
李相平, 王光復, 謝志敏
(1.海軍航空工程學院電子信息工程系,山東煙臺264001;2.總參氣象局,北京100081)
0 引言
毫米波/紅外復合制導目標跟蹤屬于多傳感器信息融合范疇,集中式和分布式是兩種主要的融合結(jié)構(gòu)。其中,分布式結(jié)構(gòu)具有造價低、可靠性高、通信量小等特點。該結(jié)構(gòu)先由自己的數(shù)據(jù)處理器產(chǎn)生局部多目標跟蹤航跡,然后把處理后的信息送至融合中心,融合中心根據(jù)各節(jié)點的航跡數(shù)據(jù)完成航跡關(guān)聯(lián)和航跡融合,形成全局估計。對于分布式多傳感器系統(tǒng)來說,有兩個重要的問題需解決:
a)如何決定來自不同傳感器的哪條航跡代表著同一目標,這是航跡關(guān)聯(lián)問題;
b)在確定了兩個傳感器對同一目標的位置和狀態(tài)估計后,如何對兩個傳感器的數(shù)據(jù)進行融合,這是航跡融合問題。
許多學者對航跡融合算法進行了深入細致的研究:
a)文獻[1]介紹了在傳感器航跡估計誤差不相關(guān)假設下簡單加權(quán)航跡融合算法(SF);
b)文獻[2]提出了一種基于最大似然比的最優(yōu)航跡融合算法(M L);
c)文獻[3]介紹了由于共同過程噪聲的引入,各傳感器局部估計誤差相關(guān)的基礎(chǔ)上的協(xié)方差加權(quán)航跡融合算法;
d)文獻[4]出于簡化計算復雜度,提出了一種自適應航跡融合算法;
e)文獻[5]提出了分層融合算法,該算法在傳感器與融合中心高速通信且局部航跡估計時刻與全局航跡融合時刻的相同條件下的航跡融合解是最優(yōu)的。
本文在上述基礎(chǔ)上給出一種改進的算法。
1 簡單航跡融合算法
假設分布式多傳感器信息融合系統(tǒng)由傳感器1和傳感器2組成,目標運動狀態(tài)模型為

傳感器i∈[1,2],k時刻的量測Zi(k)服從如下線性模型:

式中:X(k)為狀態(tài)向量;Φ為一步狀態(tài)轉(zhuǎn)移矩陣;Z i(k)為傳感器i的量測向量;Hi(k)為傳感器i的量測矩陣;W(k),Vi(k)為統(tǒng)計獨立的零均值高斯白噪聲;方差分別為Qi和Ri。
假設不同傳感器航跡估計誤差是統(tǒng)計獨立的,則兩傳感器的加權(quán)融合算法為

2 互協(xié)方差加權(quán)融合算法
與加權(quán)融合算法完全忽略誤差相關(guān)性不同,在互協(xié)方差加權(quán)融合算法中則考慮了這種相關(guān)性對融合估計的影響,兩傳感器的融合算法如下:

?i=1,2,傳感器i的航跡狀態(tài)估計為基于截至k時刻的最新量測序列Zi(k)的最小均方誤差估計,假設對應傳感器i,濾波增益為K i(k),則關(guān)于互協(xié)方差有如下的遞推關(guān)系[4]:

式中:R12為兩傳感器的量測誤差互協(xié)方差。
3 毫米波與紅外融合跟蹤
上面介紹了兩種基本的航跡融合算法,本文中的毫米波與紅外復合制導目標跟蹤,采用分布式融合結(jié)構(gòu)。但是對于紅外傳感器,由于只有角跟蹤問題[6],文中采用一種基于部分反饋的毫米波與紅外融合模型,同時考慮到導彈在搜索和攻擊目標過程中,毫米波與紅外傳感器不同程度地受到各種干擾,給出一種基于環(huán)境變量的航跡融合算法[7]。基本思想:當毫米波與紅外傳感器同時工作均未受到干擾時,毫米波與紅外子跟蹤濾波器各自產(chǎn)生局部估計,將各自得到的航跡送至融合中心,融合中心對局部航跡采用簡單加權(quán)因子方法進行融合,得到全局航跡,然后將融合得到的預測狀態(tài)即協(xié)方差陣反饋到紅外子跟蹤濾波器,作為它的預測狀態(tài)及其協(xié)方差;當兩傳感器其中之一受到干擾時,受干擾傳感器信息不可用,融合輸出為未受到干擾的傳感器產(chǎn)生的局部航跡。融合模型如圖1所示。

圖1 毫米波/紅外復合制導融合跟蹤模型
(1)局部估計
為了簡化討論,假設目標運動模型如式(1)所示,目標的狀態(tài)向量 X(k)是在極坐標系下定義的,量測方程為

式中:i對應符號R和I,分別代表毫米波雷達和紅外傳感器。量測向量分別為Z R(k)=[r(k),θR(k),φR(k)]T,Z I(k)=[θI(k),φI(k)]T。量測矩陣如下:

式中:r(k),θR(k)和 φR(k)為毫米波雷達的量測距離、俯仰角和方位角;θI(k),φI(k)為紅外傳感器的量測俯仰角和方位角;V R和V I(k)為毫米波雷達和紅外傳感器的量測誤差向量,假定是相互獨立的零均值高斯白噪聲,協(xié)方差陣分別為RR(k)和 RI(k)。
由于量測矩陣是非線性的,采用擴展卡爾曼濾波算法,可以得到兩傳感器的狀態(tài)估計和協(xié)方差更新為

式中:H i(k)是傳感器i線性化后的雅可比矩陣,i意義同上。
(2)航跡融合
假設在航跡融合之前,已經(jīng)完成了局部航跡在時間和空間上的配準,同時對兩傳感器代表同一目標的兩條航跡完成了關(guān)聯(lián)。當毫米波雷達與紅外同時工作時,對上面的兩個局部估計結(jié)果進行融合。融合過程中,利用傳感器受到干擾情況等環(huán)境變量來描述傳感器數(shù)據(jù)的可用性。在單傳感器局部跟蹤過程中,定義新息序列為

相應的新息協(xié)方差為


假設vi(k)∈Rl,l為傳感器的觀測向量維數(shù),則ηi(k)理論上服從自由度為 l的χ2分布。按照 χ2分布規(guī)律,可以定義不同置信水平上的傳感器有效域:預先定義閾值 γi,如果 ηi(k)≥γi,則傳感器量測信息不可用,在融合過程中忽略該傳感器的信息;如果 ηi(k)<γi,則認為該傳感器工作正常,在融合過程中采用該傳感器的信息。從文獻[7]可知,對于毫米波雷達傳感器,其量測向量包括距離、俯仰角和方位角,即 l=3,考慮95%的置信水平,γR=7.8;對于紅外傳感器,其量測向量包括俯仰角和方位角,即l=2,同樣考慮95%的置信水平,γI=5.9。
在環(huán)境變量計算的基礎(chǔ)上,考慮導引頭傳感器的時效性,利用加權(quán)因子融合兩傳感器的估計結(jié)果[8]:

a)如果ηR<7.8,ηI<5.9,則兩傳感器信息都可以用
b)如果 ηR<7.8,ηI≥5.9,則紅外信息不可用,融合輸出為毫米波雷達局部估計結(jié)果:

c)如果 ηR≥7.8,ηI<5.9,則毫米波雷達信息不可用,輸出為紅外局部估計結(jié)果:

d)如果 ηR≥7.8,ηI≥5.9,則兩傳感器信息都不可用,融合輸出為狀態(tài)預測結(jié)果:

當毫米波雷達和紅外傳感器均未受干擾時,兩傳感器信息都可用,引入部分反饋后,紅外傳感器的局部狀態(tài)估計算法如下:

4 仿真分析
為了簡化問題,仿真中假設導彈與目標在同一水平面或同一高度上,即目標在水平面上運動,毫米波傳感器提供距離和方位信息,紅外傳感器提供方位信息,目標初始位置為(2 000 m,10 000 m),初始速度為(0,15 m/s),在前200 s內(nèi)目標以初始速度作勻速直線運動,在t=200 s時目標以加速度(0.1 m/s2,0.1 m/s2)作勻加速轉(zhuǎn)向運動,持續(xù)時間100 s,在t=(300~500)s內(nèi)目標繼續(xù)作勻速直線運動。假設毫米波和紅外傳感器數(shù)據(jù)已融合到中心融合節(jié)點時刻和節(jié)點坐標系中,同步后采樣周期 T M=T I=1 s,毫米波量測噪聲標準差分別為:距離維σM r=500 m,方位角σMθ2 m rad;紅外傳感器的方位角量測噪聲標準差為 σIθ=0.1 m rad,過程噪聲為 0.05m/s2。假設在目標運動過程中,在 t=(300~330)s內(nèi),紅外傳感器受到干擾,其量測噪聲方差增大10倍,而毫米波信息不變。分別采用簡單加權(quán)融合算法(SF)和文中的算法進行100次蒙特卡羅仿真,結(jié)果如下所示。
從圖2,圖3,圖4,圖5可以看出:首先,無論是位置均方誤差還是速度均方誤差,融合后的航跡均方根誤差都比單個傳感器跟蹤均方誤差要小,同時,由于EKF濾波涉及到模型線性化更嚴重,導致紅外跟蹤誤差較毫米波雷達跟蹤誤差要大;其次,當紅外傳感器未受干擾時,在目標運動過程中,無論是目標位置均方誤差還是速度均方誤差,兩種融合算法融合精度相當,但在t=(300~330)s內(nèi),紅外傳感器受到干擾的過程中,采用簡單加權(quán)融合算法位置和速度均方誤差明顯增大,融合跟蹤精度下降,而改進的算法由于引入環(huán)境變量因子,能自適應地判斷干擾的出現(xiàn),在此期間,舍棄紅外傳感器信息,只利用毫米波傳感器信息,融合估計精度明顯優(yōu)于SF算法,在干擾消除后,SF算法估計誤差收斂到與改進的算法結(jié)果,因此改進的算法在保持融合精度的同時,提高了導引頭的抗干擾能力。

圖2 X方向位置均方誤差圖

圖3 Y方向位置均方誤差

圖4 X方向速度均方誤差圖
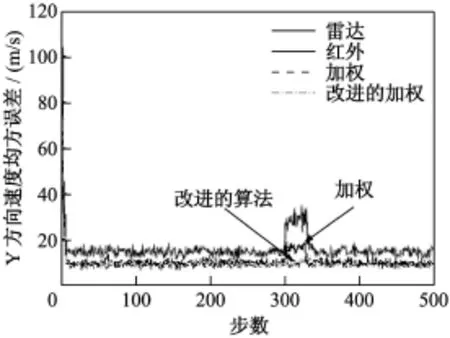
圖5 Y方向速度均方誤差
5 結(jié)束語
航跡融合是多傳感器信息融合的關(guān)鍵問題,本文研究了毫米波/紅外復合制導目標融合跟蹤問題,介紹了簡單加權(quán)融合和互協(xié)方差加權(quán)融合,考慮到紅外傳感器只有角度量測信息,在應有部分反饋的基礎(chǔ)上,給出一種基于環(huán)境變量的融合跟蹤模型。且進行了相應的仿真實驗,仿真結(jié)果表明,改進的算法保證全局融合精度的同時,提高了系統(tǒng)抗干擾能力,表明了該算法的有效性。
[1] Singer R,Kanyuck.Computer Control of Multiple Site Track Correlation Automatic[J].1971,(7):455-464.
[2] R.K.Saha,K.C.Chang.An Efficient A lgorithm for M ultisensor Track Fusion[J].IEEE Transaction on Aerospace and Electronic Systems,1992,34(1):200-210.
[3] Bar-Sha lom Y,Camp L.The Effect o f Common Process Noise on the Tw o-Sensor Fused-Track Covariance[J].IEEE Trans on Aerospace Electronic System,1986,22(6):803-805.
[4] Beugnon C,Singh T,Linas J et al.An Adap tive T rack Fusion in a M u ltisensor Environment[C].Paris:ISIFConference,2000.
[5] C.Y.Chong,S.Mori,K.C.Chang.Distributed Mu ltitarget Mu ltisensor Tracking in Mu ltitarget-Mu ltisensor T racking:Adanced A pplications[M].Y.Bar-Shalom,ed,Boston,MA:A rtech H ouse,1990:247-294.
[6] S.C.Nardone,V.J.A lidela.Observability C riteria for Bearing-on ly Target Motion Analysis[J].IEEE Transaction on Aerospaceand Electronic Systems,1982,17(2):162-166.
[7] Yuan Q,Dong C Y,W ang Q et al.An Adap tive Fusion A lgorithm Based on ANFIS for Radar/In frared System[J].Expert Systems with App lications.2009,36:111-120.
[8] 孫書利,崔平遠.兩種傳感器最優(yōu)信息融合Kalman濾波器及其在跟蹤系統(tǒng)中的應用[J].宇航學報,2003,24(2):206-209.
猜你喜歡
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數(shù)理化(高中版.高考數(shù)學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
