冗余驅動盾構機推進系統機液耦合模型及載荷特性分析
2010-12-03 09:46:58余海東
中國機械工程 2010年3期
丁 晟 余海東 王 皓
上海交通大學機械系統與振動國家重點實驗室,上海,200240
0 引言
盾構機是集機械、電氣、液壓、測量、控制等多學科技術于一體且專用于地下隧道工程開挖的技術密集型重大工程裝備。為了滿足巨大的工作載荷,盾構機通常采用冗余驅動的方式進行掘進,但這同時會造成驅動力分配不平衡,在復雜多變的地質情況下,容易發生堵停事故[1]。
近年來隨著盾構機技術的不斷發展,國內外學者在其推進系統研究方面取得了一定成果。在機械系統方面,Sugimoto等[2]建立了考慮摩擦與動平衡的全盾體動力學模型并驗證了其有效性,Komiya等[3]建立了主要考慮刀盤對外載響應的有限元模型,Marshall等[4]研究了推進缸結構對運動和力的影響。這些研究主要集中在機械結構,沒有考慮液壓控制部分。在液壓系統方面,施虎等[5-6]分別建立了壓力控制和速度控制模型,分析了各參數對于壓力和速度特性的影響。他們的研究沒有考慮機械系統的載荷傳遞特性,且系統穩態假設在導致堵停事故的極端工況外載下并不適用。
本文以直徑為6280mm的某型土壓平衡盾構機推進系統為研究對象,分別建立考慮冗余驅動機械系統動力學模型和單組液壓系統的液壓模型,在此基礎上建立冗余驅動盾構機推進系統機液耦合模型;給出外載與液壓調速閥開度值之間的關系,利用MATLAB/Simulink模塊對變載荷下含速度—外載反饋和不含反饋條件下冗余驅動各組推進缸載荷特性進行分析,揭示盾構機堵停現象產生機理,為其控制策略提供依據。
1 盾構機推進系統機液耦合模型
1.1 幾何模型及載荷
盾構機盾體部分的主體結構如圖1所示,它由16個液壓缸進行推進,刀盤在切削過程中,受到巖土施加的載荷,由盾體的前部傳遞到各個推進缸上,各個推進缸前端與盾體固接,后部通過球鉸連接后作用在管片上,為了便于控制,一般將16個液壓缸分為4組,由于重力的作用和掘進過程中泥土主要分布在下半部分的原因,液壓的控制分組并不對稱,下部的液壓缸數目一般比上部多,左右液壓缸的數目和位置一般對稱,如圖2所示。
建立三維直角坐標系oxyz,如圖3所示,原點o位于刀盤切削平面的中心,z軸正方向為掘進方向,y軸正方向為重力方向的反方向,x軸正方向為水平向右。
設4個分組區域內單個液壓缸的載荷分別為F1、F2、F3、F4,同組的液壓缸共用一個控制系統,回路狀態及輸出載荷保持相同。根據各個液壓缸的幾何位置得到4個區域內等效推進力為5F1、4F2、4F3 和 3F4,等效彎矩為 M1 、M2、M3 和 M4,如圖3所示。盾體與刀盤之間通過一個三排止推軸承連接,設刀盤受到的推進方向阻力為Fz,刀盤平面內的彎矩為Mx和My。
1.2 冗余驅動機械系統模型
根據上述載荷分布,不考慮構件彈性變形和姿態偏轉,即只考慮掘進方向上的一個自由度,在oxyz中建立力學平衡方程:
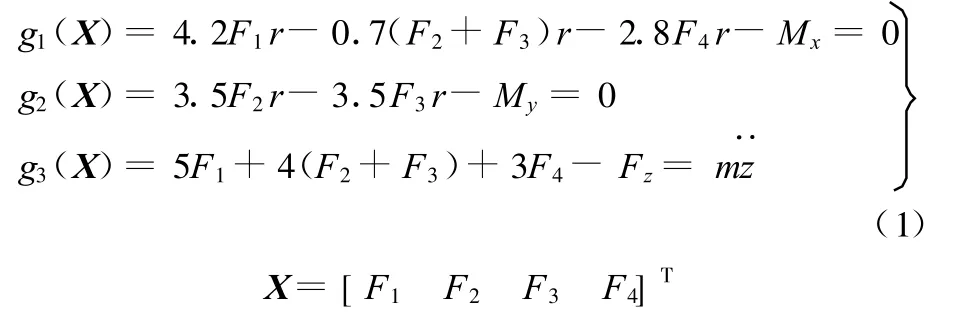
式中,z¨為盾構機掘進方向的加速度,由液壓系統得出;r為推進缸中心點在xy平面內與盾構中心點的距離;m為被推進部分總質量;Fz為掘進方向的阻力;Mx、My分別為x軸、y軸方向盾構機所受的彎矩。
式(1)可以寫成矩陣形式:AX=B,其中系數矩陣A包含了機構的幾何信息,X為包含驅動力的未知向量,B為慣性力向量。未知量個數為4,方程個數為3,因此解不唯一。
令A+為A的Penrose pseudo廣義逆,則X=A+B為矩陣方程的最小范數解。其物理意義是完全滿足運動協調條件的同時使驅動力的平方和最小。然而對于實際的盾構機推進系統,由于沒有協調機構,完全靠控制系統來減小誤差,無法達到精確的運動協調,無法完全滿足運動協調條件,因此由最小范數解求得的驅動力與實際情況不符。
盾構機控制系統往往不直接調節推進缸行程,而是通過控制驅動力的方式來控制運動誤差。各組推進缸通過一定的控制算法不斷改變驅動力以靠近控制目標值,以此來減小運動誤差。
引入c(t)=[c1(t)c2(t)c3(t)c4(t)]T為各組推進缸驅動力的控制目標值,將問題轉化為求驅動力與控制目標力之差的最小范數min‖X—c(t)‖,則目標優化函數為

構造拉格朗日函數:

令

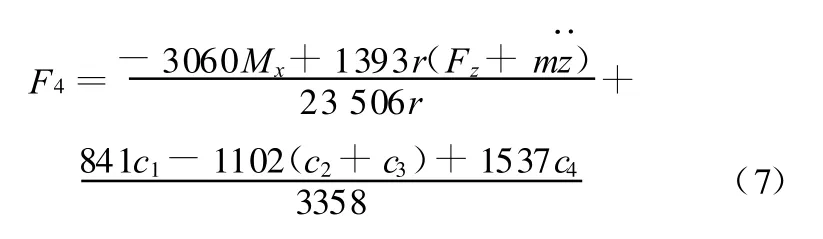
聯立式(1)、式(3)解得

1.3 液壓系統模型
盾構機推進系統的液壓回路一般由比例調速閥和比例溢流閥分別進行速度與壓力控制[5],在此對單缸液壓系統進行建模,液壓回路元件主要考慮調速閥,溢流閥只考慮流回油缸的體積流量qVc,系統結構如圖4所示。
由調速閥機構原理圖(圖5)可知,調速閥由減壓閥與節流閥串聯而成,減壓閥能保持節流閥兩端壓差不變,從而使通過節流閥的流量不受負載變化的影響。減壓閥參數中的閥口開度δ決定了流經減壓閥的流量。由于實際物理結構的限制,δ只能在一定范圍內變化。令其變化的最大值為δmax,可根據閥的型號從機械設計手冊中查得。
液壓系統工作時,將減壓閥閥口開度值分為兩個區域(δ<δmax和δ=δmax,δ、δmax分別為減壓閥閥口開度、最大開度)來討論,這兩種閥口開度值會導致液壓回路出現兩種不同狀態,須分別對其建立壓力與流量關系方程:
(1)當δ<δmax時,推進缸勻速推進,即v=v0。在控制系統的作用下,驅動力由外載決定。因此,對于液壓缸,有

式中,p1為液壓缸無桿腔壓力;A1為液壓缸無桿腔的面積;Fr為液壓缸活塞所受外載。
對于節流閥,有

式中,qV為液壓回路體積流量;Cd1為節流閥閥口流量系數;d1為節流閥滑閥直徑;h1為節流閥閥口開度;ρ為液壓油密度;p2為減壓閥出口壓力。
對于減壓閥,有

式中,Cd2為減壓閥閥口流量系數;d2為減壓閥滑閥直徑;p3為液壓泵出口壓力。
聯立式(8)~式(10),可得回路流量qV和減壓閥閥口開度δ。
(2)當δ=δmax時,推進缸輸出最大驅動力減速推進。δ隨回路載荷的增大而增大,達到最大值后保持恒定,此時δ=δmax,代入式(8)~式(10)得到流量方程:

式中,qVmax為液壓回路最大流量;As為節流閥端口面積;Amax為閥口開度達到最大時的減壓閥端口面積。
此時p3保持恒定,而 p1還在增大。由式(11)易得回路流量會減小,從而導致推進速度的減小。液壓缸的推進速度與流量的關系如下:

1.4 機—液耦合系統模型
前面對于推進系統機械結構進行建模,得到了外載從刀盤到各組推進缸的傳遞情況,建立了單個液壓缸的液壓模型,得到了載荷在液壓回路內部的傳遞情況。由于同組內的各個液壓缸共用一個液壓回路,故單缸模型與單組模型等同。
將冗余驅動機械系統模型與4組液壓回路模型通過數值算法聯結成一個整體,可得到整個機—液耦合推進系統模型。
聯立式(4)~式(11)得到4組液壓回路的減壓閥閥口開度與外載關系如下:

設h為仿真步長,Fh為總驅動力(Fh=5F1+4(F2+F3)+3F4),F(j)h為第j仿真步的總驅動力,則相應的數值算法步驟如下:
(2)Fz、Mx、My為外載輸入,并令z¨=0,將其代入式(4)~式(7)解得滿足平衡條件的驅動力。令式(5)中的Fr=Fi,求得各組液壓缸活塞桿壓力和無桿腔壓力。將代入式(9)、式(10)算出液壓系統的流量,將代入式(13)得到,轉入步驟(1)。

式中,K1、K2分別為推力系數、轉速系數;W為總推力;πR2P為土箱壓力;W0為摩擦阻力;n為刀盤轉速。

式(13)是一個分段函數,表明了各組液壓回路狀態與外載之間的分段關系,而各組液壓回路狀態決定了整個推進系統的狀態。
因此,基于式(13)提出以δi為核心的系統狀態判定方法:當某組δi達到極值δmax時,認為系統總驅動力Fh不能滿足外載的需要,系統發生堵停。可用步驟(3)得到的推進速度v(j)關于時間的曲線來驗證判定方法是否準確,并用速度變化的快慢來描述堵停的嚴重程度。
2 數值仿真模型
2.1 模型
根據上述系統模型及算法,在 MAT LAB/Simulink模塊中進行數值建模與仿真,如圖6所示。選取固定步長為0.02s,Bogacki—Shampine求解器,仿真時間為10s。
設定參數如下:預設掘進速度v0=1mm/s,液壓缸無桿腔的面積A1=49 100mm2,節流閥端口面積As=34.6mm2,閥口流量系數Cd1=Cd2=0.7,節流閥滑閥直徑d1=10mm,減壓閥滑閥直徑d2=5mm,液壓油密度ρ=900kg/m3,節流閥閥口開度h1=1mm,減壓閥閥口最大開度δmax=0.7mm,推進缸中心點在 xy平面內與盾構中心點的距離r=2792mm。
2.2 載荷
由于巖土力學特性和失效方式差異,盾構機在異質巖土掘進時,刀盤上推進阻力和彎矩會隨著刀盤的旋轉發生變化,使得冗余驅動推進系統各組液壓缸需要進行調整以獲得最優的掘進效率。文獻[8]得到盾構機在異質巖土掘進工況下的刀盤推進阻力和彎矩,本文基于該結論,進一步假設由于某種原因導致推進阻力上升,我們給出刀盤所受彎矩和推進阻力,分別如圖 7、圖8所示。
3 載荷特性分析
仿真可得各組液壓回路的驅動力、推進速度、流量、壓力等特性曲線,選取其中某些結果進行分析。
如圖9所示,約在8.4s時,δ3達到最大值δmax,根據上述判定方法判定系統進入堵停狀態。在圖10中得到驗證,從8.4s開始,第三組推進缸推進速度迅速減小,盾構機發生堵停現象。
推進速度減小后,由于反饋的作用導致外載減小,由圖11可見,F1、F2、F43組驅動力反而略有減小。相應地在圖9中,只有其中一組的閥口開度δ達到最大值,此后其余各組的δ反而減小。
因此,在總驅動力不能平衡外載阻力而出現減速推進時,若干分組推進缸的驅動力尚有一定裕度。此時,可以調節控制目標ci(t),使驅動力重新分配,使系統恢復正常工作狀態。
由于土層條件的不同,速度對外載的反饋程度存在較大差異。當反饋系數過小時,速度減小帶來的土層阻力減小量小于外載自身的增加量,我們將這種情況稱之為欠反饋,考慮這種情況進行仿真,得到各組液壓缸推進阻力曲線以及減壓閥閥口開度曲線,如圖12、圖 13所示。
在圖13中,各組δ值接連達到最大值δmax,可知盾構機發生堵停,其推進速度迅速降低至零。
通過對圖12中各組推進阻力曲線之間的比較,可總結出彎矩對系統狀態的影響規律:對于Mx,由于F1、F42組驅動力的液壓缸數不同(5個、3個),比較容易利用缸數差來達到平衡;對于My,由于F2、F3液壓缸數目相同(都是4個),兩組都輸出最大驅動力來克服巨大阻力Fz,難以用兩組驅動力差值來平衡彎矩。體現在仿真結果上,F1與F4的值相差不大,而 F2與F3的值相差較大。
通過比較兩種條件下的仿真結果,可知減壓閥閥口開度特性曲線能有效反映外載變化對液壓回路的工作狀態的影響。由仿真結果驗證可得,上述基于式(13)的以δi為核心的系統狀態判定方法有效,可為盾構機異質巖土掘進時驅動力分配的控制提供依據。
4 結論
(1)堵停現象本質是液壓元件達到極限值時回路流量減小造成的執行元件減速。而冗余驅動帶來的驅動力平衡分配問題是主要原因之一。
(2)減壓閥閥口開度值體現了外載及系統狀態的變化,可以根據該值對系統狀態進行判定。
(3)根據本文所述的由δi評價系統狀態的方法得到各組液壓回路的狀態,實時調節控制系統目標值ci(t)制定相應控制策略實現自動防堵控制。這樣可減小現場駕駛員操作難度,避免事故發生。
[1]宋天田,肖正學,蘇華友,等.上公山TBM施工2.22卡機事故工程地質分析[J].巖石力學與工程學報,2004,23(增刊1):4544-4546.
[2]Sugimoto M,Sramoon A.Theoretical Model of Shield Behavior during Excavation.I:Application[J].Journal of Geotechnical and Geoenvironmental Engineering,2002,128(2):138-155.
[3]Komiya K,Soga K,Akagi H,et al.Finite Element Modelling of Excavation and Advancement Processes of a Shield Tunneling Machine[J].Soils Found.,1999,39(3):37-52.
[4]Marshall M A,Milligan G W E,Mair R J.Movements and Stress Changes in London Clay Due to the Construction of a Pipe Jack[C]//Geotechnical Aspects of Underground Construction in Soft Ground.Rotterdam:Proc.Int.Symp.,1996.
[5]施虎,龔國芳,楊華勇.盾構掘進機推進壓力控制特性分析[J].工程機械,2008,39(5):23-26.
[6]施虎,龔國芳,楊華勇.盾構掘進機推進速度控制性能分析[J].機床與液壓,2008,36(8):77-79.
[7]張厚美,吳秀國,曾偉華.土壓平衡時盾構掘進試驗及掘進數學模型研究[J].巖石力學與工程學報,2005,11(增刊2):5762-5766.
[8]曾曉星.異質巖土工況下土壓平衡盾構載荷等效及傳遞特性研究[D].上海:上海交通大學,2009.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19