木琴演奏機械手的仿真分析與設計
2011-01-16 03:39:38王廷軍馬西沛張歡歡胡申順
上海電機學院學報 2011年3期
關鍵詞:設計
王廷軍, 印 松, 馬西沛, 張歡歡, 胡申順, 徐 俊
(上海電機學院 機械學院,上海 200245)
木琴演奏機械手的仿真分析與設計
王廷軍, 印 松, 馬西沛, 張歡歡, 胡申順, 徐 俊
(上海電機學院 機械學院,上海 200245)
利用SolidWorks軟件對一種單槌擊鍵演奏模式的木琴演奏機械手進行了仿真設計,給出了木琴、移槌裝置、擊槌裝置和機械手支架等部分的三維造型、虛擬裝配和運動仿真結果,提出了一種基于DSP芯片的機械手運動控制方案。仿真結果表明:這種機械手結構簡單,運動靈活,演奏時能夠快速而準確地定位擊鍵位置,為木琴演奏機械手的設計提供理論依據。
木琴演奏機械手;仿真分析;三維模型
隨著機器人技術的快速發展,機器人的設計也不僅僅限制在工業環境的需求設計中,而向人類生活的各個領域擴展,出現了如娛樂、導游等各種不同的機器人。近年來,娛樂機械人發展很快,已經有演奏多種樂器的演奏機械手出現[1]。演奏機械手屬于表演類特種機器人,國外關于演奏機械手的研究主要集中在鍵盤樂器和弦樂器方面,管樂器自動演奏機械手的研究相比較就少些[2-4]。無論何種樂器,在演奏時都是通過人的手、口或腳的動作來實現的。木琴屬于西洋打擊樂器的一種[5],由逐級加長的一排排鑲嵌的木條組成,按音階的順序排列在一框架上,可發出連續的音律。有的木琴的木條下方安裝了可調節音高的共鳴管,起到共鳴的作用。木琴是通過演奏者雙手握木槌去擊打鍵盤進行演奏的,在原理上,能夠模仿人手并再現鍵盤的動作,可以實現機械手自動演奏[6-7]。
為縮短木琴演奏機械手的設計周期,降低設計成本,提高設計質量,本文使用SolidWorks軟件[8]進行了木琴演奏機械手的輔助設計。
1 總體設計
單槌擊鍵式木琴演奏機械手主要由機械部分和控制部分組成,包括工控機、移槌裝置、擊槌裝置、運動控制器、木琴和支架等。它的三維模型如圖1所示。其工作原理是使用擊槌裝置代替人手去握持木槌和擊打琴鍵。擊槌裝置安裝在移槌裝置上,通過移槌裝置的左右水平快速移動完成木槌擊鍵位置的定位,利用擊槌裝置中的木槌操縱機構實現木槌的擊鍵動作,從而完成一個音符的演奏。
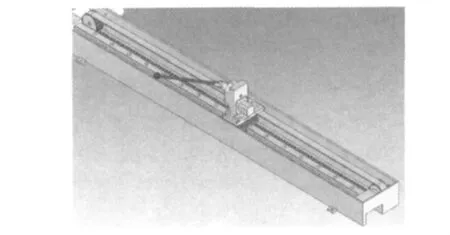
圖1 木琴演奏機械手三維模型Fig.1 Three-dimensional model of marimba manipulator
木琴演奏機械手系統圖如圖2所示。機械手的工控機輸出樂譜程序指令給運動控制器,控制器發出移動命令,驅動移槌裝置和擊槌裝置連續交替動作實現樂曲演奏。演奏時的主要動作是木槌的橫向位置控制和向下的槌擊動作控制。
設計中,先對木琴實物進行仿真建模,再對機械手的各部分進行仿真建模。同時,進行了虛擬裝配、干涉檢查和運動仿真,確保其各部分在安裝后能夠無干涉并符合預先設定的運動方案。
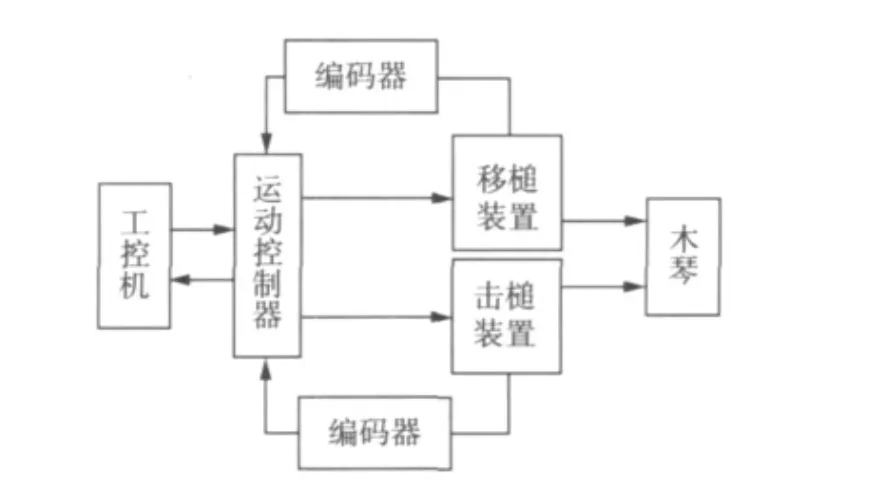
圖2 木琴演奏機械手系統圖Fig.2 Marimba manipulator system
2 木琴的仿真建模
木琴的仿真主要是對一種724型木琴進行整體建模,包括木琴架、琴鍵、共鳴管和支架等所有零部件。為確保合理的建模基準及精準的琴鍵位置、形狀尺寸,采用了自頂向下(Top-down)的建模方法。即先確定機械手的總體裝配結構和零件組成,對不同設計方案進行分析、組合,選擇出最佳設計方案,再對具體零件進行詳細的分析設計。本文中演奏機械手固定在支架上,支架又通過木琴架與木琴相連,故在建模時采用木琴架為定位基準,而不是普遍理解上的以支架作為基準。
建模時,先建立木琴的外圍框架及琴鍵的定位架,然后對琴鍵建模,再按支架與琴鍵的相對位置對支架建模。木琴的三維模型如圖3所示。
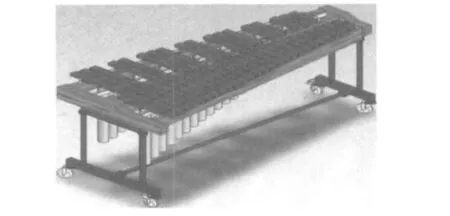
圖3 木琴三維模型Fig.3 Three-dimensional model of marimba
3 機械裝置設計及其仿真與分析
機械裝置部分主要由移槌裝置、擊槌裝置和支架等組成。按結構對其各部分完成建模、裝配后,對其進行初步運動模擬,檢查移槌裝置、擊槌裝置在運動中是否會產生干涉,確保運動可行性。
在對既定的機構方案進行建模并裝配后,進行設計結構的運動仿真。通過定義各部件間的運動副,分析其各部件相對運動形式,定義運動部件的運動方式。經解算器解算得仿真結果及演示,輸出各個運動件的位移量、速度及曲線圖。
3.1 移槌裝置
移槌裝置為小車狀物體,其傳動機構采用同步齒形帶方式。同步帶使用軟齒條傳動,不會產生滑動,可以保證傳動時的準確傳動比,噪聲較小[9]。它由滑座、頂蓋、滾珠導軌、步進電動機、編碼器、減速機構、同步帶和帶輪等組成。
頂蓋由不銹鋼制成,用于遮擋同步齒形帶和導軌等,使得傳動機構外表美觀大方。滑座由上滑塊和下滑塊組成,上滑塊用于連接移槌裝置,下滑塊用于連接同步帶。上滑塊和下滑塊使用螺栓連接,兩者之間形成一個矩形間隙,頂蓋則在這個矩形間隙中穿過。下滑塊由同步帶拖動,在滑軌上水平移動。圖4給出了未安裝頂蓋和上滑塊的移槌裝置示意圖。
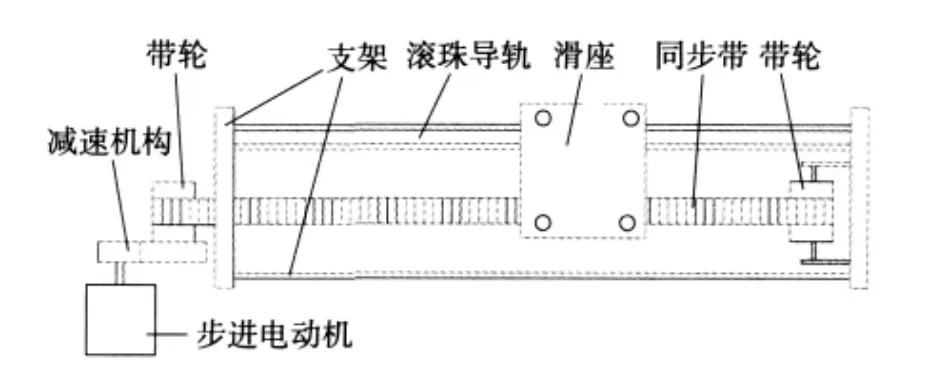
圖4 移槌裝置示意圖Fig.4 Mallet-moving device
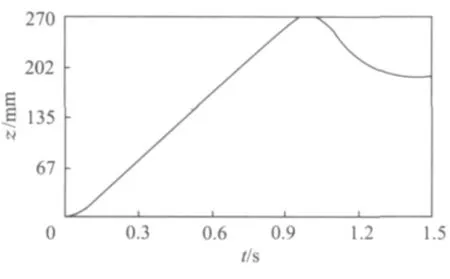
圖5 移槌位移曲線Fig.5 Curve of displacement of mallet-moving device
滑座的運動通過步進電動機、編碼器組成的伺服系統由同步帶直接牽引,木槌固連在滑座上,隨滑座一起移動,按計算機程序給出的目標值(音符數據)變換木槌位置。移槌裝置的移槌位移曲線如圖5所示,其移槌角加速度曲線如圖6所示。
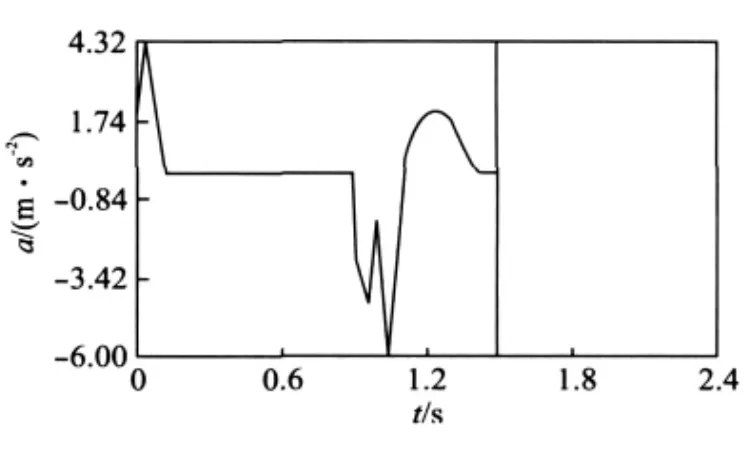
圖6 移槌角加速度曲線Fig.6 Curve of angular acceleration velocity of mallet-moving device
3.2 擊槌裝置
擊槌裝置相當于人的手掌和手腕部分,它由步進電動機、握木槌機構和支撐架等組成,由小步進電動機驅動完成擊鍵動作。擊槌裝置的三維模型如圖7所示。圖8給出了擊槌裝置的位移曲線。演奏時,滑座的移動速度較快,故設計時考慮機械裝置盡可能地減輕質量。
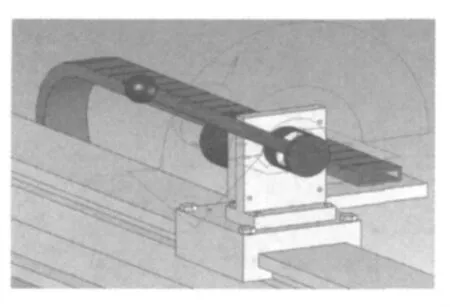
圖7 擊槌裝置三維模型圖Fig.7 Three-dimensional model of mallet-beating device
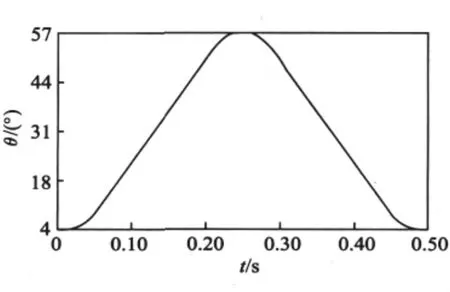
圖8 擊槌位移曲線Fig.8 Curve of displacement of mallet-beating device
擊槌電動機采用小步進電動機,以功率夠、體積小、質量輕為目標,從而減少機構的運動慣性,提高滑座運動時的位置精度。圖9給出了擊槌裝置的角加速度曲線。由圖可見,裝置運動特性較好,適應快速靈活運動的要求。
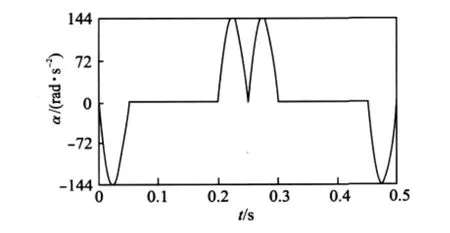
圖9 擊槌角加速度曲線Fig.9 Curve of angular acceleration velocity for mallet-beating device
4 控制系統設計
機械手控制系統采用上位機-下位機控制模式。上位機使用工控機,它帶有操作系統,存儲了一些采用VC++編排好的樂譜程序。下位機的微處理器采用TMS320F240DSP芯片,它具有高速、低功耗、易于開發等特點[10-12],能夠滿足演奏機械手的快速運動和變換運動方向的工作需求。上位機通過通信模塊與底層控制器進行通信,底層控制器驅動步進電動機,實現對電動機的運動控制[13]。機械手滑座的水平移動、擊槌裝置的木槌轉動都采用步進電動機驅動。光電式編碼器作為檢測電機軸的位置傳感器。系統的步進電動機、反饋檢測元件光電式編碼器構成了伺服控制系統。
通常,機器人的運動軌跡規劃與控制對機器人的工作非常重要[14-15]。對于木琴演奏機械手,其運動軌跡有移槌和擊槌的復合運動形成,體現在槌頭的軌跡是這兩個運動的疊加結果。滑座機構快速、準確地運動到待擊槌位置是保證機械手演奏定位精度的一個重要條件。
5 結 語
運用SolidWorks軟件進行了木琴演奏機械手的輔助設計,包括三維造型設計、三維虛擬裝配和運動仿真。通過對木琴、移槌裝置、擊槌裝置和支架的仿真建模及虛擬裝配,可及時發現設計中存在的結構錯誤,利用參數驅動功能實現同步修改。根據三維裝配圖動態仿真機構的傳動關系、干涉檢查和運動仿真,確保了機械手各部分在安裝后無干涉并符合預先設定的運動方案,提高了設計效率。這種單槌擊鍵式機械手結構簡單、運動靈活、演奏定位準確,能演奏簡單的編程樂曲。
[1]吳 兵,吳翠茹,王振坤,等.基于數控技術的電子琴演奏機械手研究[J].裝備制造技術,2010(2):6-7,23.
[2]郭劍鷹,呂恬生.國外音樂機器人研究[J].機電一體化,2002(3):14-18.
[3]郭劍鷹,盛鑫軍,呂恬生.吹笛機器人系統設計[J].機器人技術與應用,2001(6):19-24.
[4]張博玲,徐崇庶.薩克斯管和小號的自動演奏機器人[J].機器人技術與應用,1998(2):7-8.
[5]劉 剛.雜說打擊樂器[J].樂器,2002(10):20-21.
[6]胡德靜.淺談木琴演奏的手臂作用與槌法[J].徐州教育學院學報,2000,15(3):88.
[7]汪 燁,王廷軍.基于20GM定位模塊木琴演奏機械手的研究[J].制造業自動化,2009,31(8):154-156.
[8]陳桂銓,郭智勇.SolidWorks 2000 實作 與 應 用[M].北京:中國水利水電出版社,2001.
[9]鄧星鐘.機電傳動控制[M].4版.武漢:華中科技大學出版社,2007.
[10]劉銀萍.基于DSP的足球機器人控制系統的設計[J].控制工程,2006,13(Suppl):173-175.
[11]李 臨.基于TMS320F243DSP器件的位置控制器設計[J].電子技術,2000(9):56-58.
[12]水恒華,周 琴.基于雙DSP+FPGA的自動影像數控加工控制系統[J].上海電機學院學報,2010,13(3):140-143.
[13]劉 兵,尤 波,宋繼良.基于DSP的伺服運動控制器[J].哈爾濱理工大學學報,2005,10(3):114-116,120.
[14]張 富,朱泰英.基于能量與精確定位下機器人運動最佳路徑的研究[J].上海電機學院學報,2009,12(2):154-156,172.
[15]李淑琴,尹 航.機器人可視化仿真模型及同步控制系統的研究[J].北京信息科技大學學報:自然科學版,2010,25(3):48-51.
Simulation Analysis and Design of Marimba Manipulator
WANG Tingjun, YIN Song, MA Xipei, ZHANG Huanhuan, HU Shenshun, XU Jun
(School of Mechanical,Shanghai Dianji University,Shanghai 200245,China)
Using the software SolidWorks,this paper presents simulation analysis and design of marimba manipulator in which a key is beaten by only one mallet.The manipulator's three dimensional model,virtual assembly,motion simulation and structure optimization of marimba,mallet-moving device,mallet-beating device,and its bracket are discussed.The control model and motion controller are also described.A motion control method is proposed based on DSP.The results show that the manipulator has a simple structure and agility moving.It can quickly and accurately localize a poison that beats a key.The design may provide theoretical supports to marimba manipulator.
marimba manipulator;simulation analysis;three-dimensional model
TP 241.3
A
2095-0020(2011)03-0169-04
2011-04-19
國家高技術研究發展計劃(863)項目資助(2007AA041600);上海市教育委員會重點學科資助(J51902)
王廷軍(1966-),男,副教授,博士,專業方向為機械電子工程,E-mail:wangtj@sdju.edu.cn
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
