未知環境中基于觀察者的多機器人編隊控制方法
2011-01-23 05:31:56曾良才
武漢科技大學學報 2011年3期
雷 斌,曾良才
(武漢科技大學機械自動化學院,湖北武漢,430081)
近年來,機器人編隊控制已成為多移動機器人研究的一項關鍵技術。編隊控制是指多個機器人在到達目的地過程中,既保持某種隊形又能適應環境約束(如存在障礙物或者空間的物理限制)的控制技術。多機器人研究所要解決的主要問題是機器人之間的協調與合作,對于自主移動機器人編隊問題來說,協調主要是使機器人避免與障礙物以及機器人之間發生碰撞,而合作就是保持隊形。機器人編隊研究可分為兩類:①集中式控制,它通過一個集中控制單元來監督整組機器人并分別命令每個機器人的運動;②分布式控制,每個機器人利用局部信息自主運動[1]。目前多移動機器人編隊方法[1-2]主要有領導-跟隨法(Leader follo wing)、基于行為法(Behavior-based)和虛結構法(Virtual-structure),其中,虛結構法利用集中式控制器,而基于行為法和領導-跟隨法通常使用分布式控制器。領導-跟隨法、基于行為法和虛結構法都可控制機器人以一定隊形運動,但在復雜未知環境中它們均存在一定的缺陷。領導-跟隨法在靜態環境中可以獲得比較準確、穩定的隊形,但對動態環境的適應能力不強,機器人之間的避碰等問題沒有得到很好的解決,而基于行為編隊法對環境的適應能力較強,但在隊形穩定性上存在一定的缺陷。為此,本文結合領導-跟隨法[3]和VFH+(Vector Field Histogram)避障法[4],提出一種基于觀察者的多機器人編隊控制方法,并利用Player/Stage機器人仿真平臺,對編隊控制方法進行了仿真實驗。
1 VFH+避障法和l-ψ編隊控制
1.1 VFH+避障法
避障是自主移動機器人的一項基本能力,它保證機器人在環境信息未知的情況下,能夠安全到達目的地。VFH+避障法是一種用于機器人實時避障的方法,它是對1991年開發的V FH法[5](向量域直方圖)的一種改良版本。與V FH法一樣,VFH+避障方法的輸入是局部環境的柵格圖,叫做直方圖[5]。為了計算機器人新的運動方向,VFH+避障法利用了一個4級數據縮減的過程[4]。在前3級里,機器人當前位置周圍信息由二維柵格圖縮減為一維極線直方圖。在第4級,該方法通過遮罩的極線直方圖和代價函數來選擇一個最合適的方向。V FH+避障法首先在遮罩的極線直方圖中選擇所有的開放區域,然后確定一組可能的候選方向,最后利用代價函數來評價這些候選方向,選擇代價最低的那個候選方向作為機器人新的運動方向。VFH+避障法已通過大量實際檢驗,并成功運用于一種導盲機器人上工作。
1.2 l-ψ編隊控制
在l-ψ法中,一個機器人被定義為領導者,而其他機器人被稱為跟隨者。該方法的基本思想是,跟隨者以一定的偏移量(或一定的時間延時)跟蹤領導者的位置和導向角。目前有l-ψ和l-l兩種隊形控制法[3],其中,l代表領導者和跟隨者之間的距離;ψ代表兩者之間的角度。l-ψ法的關鍵思想是,控制跟隨者和領導者之間實際距離和角度,使其達到期望的距離和角度。但單獨采用該方法,往往存在不少問題。例如,當領導者避障時,或是突然停止,則跟隨者的反饋量會變得過大,這樣就不能保持隊形的穩定性。又如,當領導者位置在跟隨者后面時,跟隨者的導向角就會發生變化,因此該方法很難在實際中單獨運用。
2 基于觀察者的多機器人編隊方法
2.1 編隊方法的基本思想
針對l-ψ法存在的不足,我們提出一種基于觀察者的編隊方法,如圖1所示。基于觀察者的編隊方法的基本思想是:指定一個機器人作為觀察者,利用V FH+避障法快速、安全地到達指定地點;領導者根據觀察者的運動軌跡和傳感器信息,并根據隊形的可通過性來優化領導者的軌跡,進而控制跟隨者以一定的隊形運動。使用基于觀察者的編隊控制方法,通過對觀察者的軌跡優化,可以較好地解決領導者運動狀態突變對跟隨者影響的問題。由圖1可看出,觀察者的運動軌跡在A區會出現較大的突變,如果單純使用l-ψ法,則無法保持隊形的穩定。由觀察者運動軌跡和優化后領導者軌跡可看出,領導者的軌跡更加合理,且保持著隊形的穩定性。
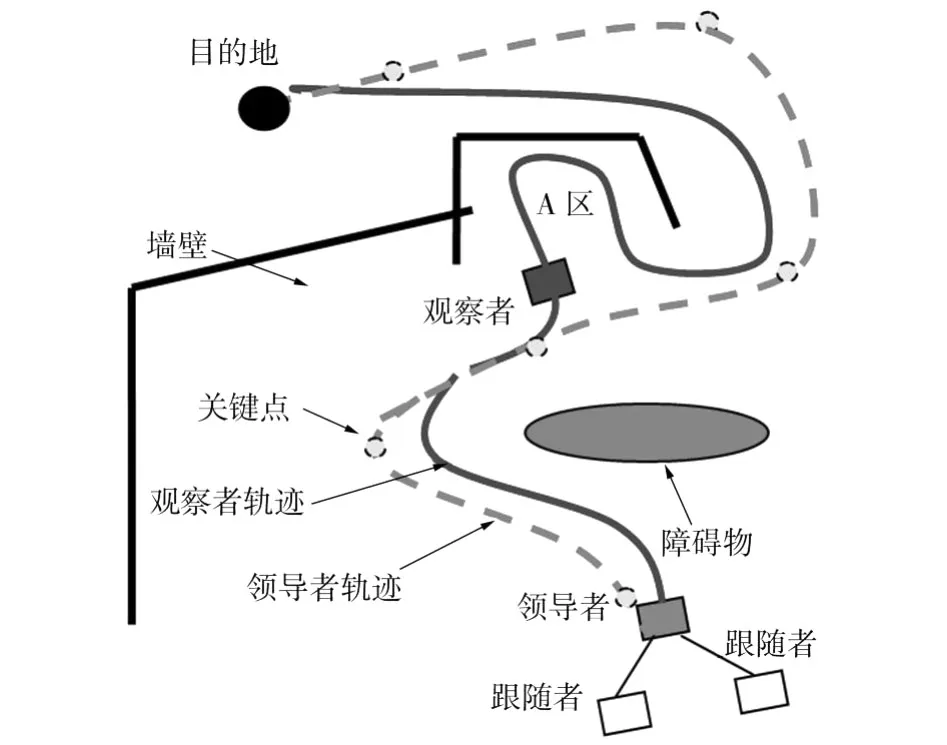
圖1 一個基于觀察者的編隊方法的例子Fig.1 An example of observer-based formation control
2.2 編隊結構的控制
圖2為基于觀察者的多機器人編隊結構圖。由圖2可看出,編隊結構主要分為觀察者、領導者和跟隨者。觀察者是利用V FH+避障法搜索一條到達目標點的安全路徑,同時根據其軌跡(PO)和傳感器數據(SO)及隊形寬度(dF)規劃出一些領導者路徑的關鍵點(PL);領導者是其沿著這些關鍵點運動,同時根據傳感器信息來調整編隊的隊形變化,以適應環境的約束,且能自主避碰;跟隨者是以一定的角度和距離跟隨領導者運動,同時能自主避碰。
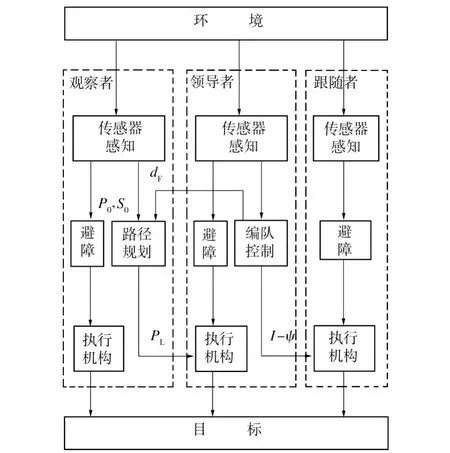
圖2 基于觀察者的多機器人編隊結構圖Fig.2 Block diagram of observer-based formation control
編隊結構所選擇的關鍵點如下:①去除不合理的位置;②當前隊形的寬度可通過:左邊不可通過,而右邊可通過,使領導者位置向右偏移一定位置,使整個隊形通過;右邊不可通過,而左邊可通過,使領導者位置向左偏移一定位置,使整個隊形通過;左右兩邊都可通過,使領導者保持觀察者的位置;③當前隊形寬度不可通過,使領導者保持觀察者的位置,當領導者到達該位置時,會通知跟隨者改變隊形,縮小隊形寬度。
編隊結構的關鍵點在于如何對觀察者的路徑進行優化,得到領導者軌跡的關鍵點,使領導者的軌跡更加合理。根據觀察者傳感器的數據,我們可以得到該軌跡附近的環境信息,然后對這些環境信息進行處理,就可以規劃出領導者的路徑。
3 仿真實驗
通過Player/Stage機器人仿真平臺,我們對多機器人編隊控制方法進行仿真實驗。Player是一個機器人設備服務器[6],它可使我們簡單而完全地控制移動機器人上的傳感器和驅動器。Stage是一種在自主機器人和智能傳感器系統中用作仿真研究的軟件工具[7],它在一個二維點陣圖環境中模擬仿真一組移動機器人和傳感器等對象,并且能夠通過Player來控制它們。特別值得注意的是,用Player/Stage仿真平臺開發的客戶端控制程序可以經過很少甚至不需要修改就能在真實的機器人上工作。
在Player/Stage機器人仿真平臺上,我們設計了一個20 m×20 m的場地,構造機器人編隊避過障礙物到達目標點時的仿真環境。4個裝備有激光、聲納、位置傳感器的仿真Pioneer2機器人隨機給定起始位置,其中,機器人1作為觀察者,機器人2作為領導者,機器人3、4作為跟隨者,機器人2、3、4以三角形編隊運動。障礙物的位置未知,目標點位置為6 m、-4 m。客戶端在Eclip se條件下利用Java語言編寫算法控制程序,并通過TCP socket連接到Player服務器端,仿真實驗結果如圖3所示。由圖3可看出,基于觀察者的編隊方法可使整個編隊的隊形保持更穩定,且其路徑更加合理高效。

圖3 仿真實驗結果Fig.3 Simulation results
4 結語
就當前主要的機器人編隊方法,并針對其存在的問題,本文提出一種基于觀察者的多機器人編隊方法。該方法主要是利用觀察者的運動軌跡信息及其獲得的傳感器數據信息對領導者的路徑進行優化,減少了運動突變和編隊死區的存在,因此可以使隊形控制獲得相對理想的結果。通過Player/Stage機器人仿真平臺,該方法可有效地控制一組移動機器人以一定隊形無碰地到達指定目的地。
[1] Nguyen Q pH,Huang S,Trinh H.Observer based decentralizedapp roach to robotic formation control[C]∥Proceedings of the 2004 Australian Conference of Robotics and Automation,2004:1-8.
[2] Fredslund J,Mataric M J.A general algorithm for robot formations using local sensing and minimal communication[J].IEEE Transactions on Robotics and Automation,2002,18(5):837-846.
[3] Desai J P,Kumar V,Ostrow ski J P.Controlling formations of multip lemobile robots[C]∥IEEE International Conference on Robotics and Automation,1998:2 864-2 869.
[4] U lrich I,Bo renstein J.VFH+reliable obstacle avoidance for fastmobile robots[C]∥IEEE International Conference on Robotics and Automation,1998:1 572-1 577.
[5] Borestein J,Koren Y.The vector field histogramfast obstacle avoidance for mobile robots[J].IEEE Transactionson Robotics and Automation,1991,7(3):278-288.
[6] Brian P G,Richard T,Vaughan K S.et al.Most valuable p layer:a robot device server fo r distributed control[C]∥Hawaii:Proc IEEE/RSJ Intl Confon Intelligent Robots and Systems,2001:1 226-1 231.
[7] Richard T V.Massively multi-robot simulations in stage[J].Swarm Intelligence,2008,2(2-4):189-208.
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
兒童故事畫報(2019年5期)2019-05-26 14:26:14
制造技術與機床(2017年3期)2017-06-23 08:11:21
Coco薇(2016年2期)2016-03-22 02:42:52
智能系統學報(2015年4期)2015-12-27 09:38:35
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31