基于PSO_LSSVM的抽油機電動機扭矩軟測量建模
2011-01-29 08:48:32黃安貽
中國機械工程 2011年11期
陳 禎 黃安貽
武漢理工大學,武漢,430070
基于PSO_LSSVM的抽油機電動機扭矩軟測量建模
陳 禎 黃安貽
武漢理工大學,武漢,430070
提出了一種新的基于粒子群優化的最小二乘支持向量機(PSO_LSSVM)模型的抽油機電動機扭矩軟測量方法,該方法利用粒子群算法取代以往慣用的交叉驗證法來進行模型參數的優化,從而避免了參數選擇時的盲目性,提高了效率。仿真驗證證明,基于PSO_LSSVM的抽油機電動機扭矩軟測量模型能夠有效地克服傳統測量方法的不足,并獲得較理想的測量精度和速度,具有小樣本學習能力強和計算簡單的優點。
抽油機;扭矩;軟測量;粒子群優化最小二乘支持向量機(PSO_LSSVM)
0 引言
作為游梁式抽油機的動力來源,電動機的輸出軸扭矩是分析游梁式抽油機動力性能和工作狀況的重要工作參數之一,它在確定電動機輸出功率、檢查功率利用情況、檢查抽油機平衡狀況以及指導抽油機節能裝置設計等方面都有非常重要的作用。傳統扭矩測量方法中扭矩信號需采用導電滑環或無線等方式進行傳輸,可靠性較低且成本高,這也直接導致了傳統扭矩測量方法難以在油田測試中推廣。軟測量技術是近年來在過程控制和檢測領域涌現出的一項新技術,是目前過程檢測和控制研究發展的重要方向。軟測量技術以易測過程變量(輔助變量或二次變量)為基礎,利用易測過程變量和待測過程變量(難測主導變量)之間的數學關系(軟測量模型),通過各種數學計算和估計實現對待測過程變量的測量[1]。為了降低硬件測量電動機扭矩的難度和成本,國內外已經出現了一些將軟測量技術應用到電動機扭矩測量的研究,這其中又以應用神經網絡建模進行測量的方法居多[2-3]。神經網絡建模需要大樣本數據,而且容易出現局部極小和過擬合問題,并存在神經網絡拓撲結構需要經驗試湊的局限性。
本文運用軟測量的思想,利用基于粒子群優化的最小二乘支持向量機(particle swarm op timization_least squares support vector m achine,PSO_LSSVM)方法對抽油機電動機輸出扭矩這一難以測量的參數進行軟測量,采用粒子群優化(PSO)方法來選擇最小二乘支持向量機(LSSVM)的模型參數,克服了常用的交叉驗證法耗時與參數選擇盲目的不足。利用該方法構建的軟測量模型不但克服了傳統測量方法的不足,具有動態響應迅速、可與抽油機光桿位移和載荷測量同步等優點,而且與神經網絡軟測量方法相比,在小樣本條件下,其測量精度大大提高,并能成功避免神經網絡建模存在的問題。最后以仿真應用算例驗證了所提出方法的有效性,仿真結果表明,基于PSO_LSSVM的抽油機電動機輸出扭矩軟測量模型的估計值與實際測量值較一致。
1 抽油機電動機扭矩軟測量原理
輔助變量的類型、數目、測量精度以及過程數據的采集與處理等因素都會嚴重影響軟測量儀表的性能。在基于PSO_LSSVM的電動機扭矩軟測量技術的應用中,采集的輔助參數數據通過傳感器的RS-232接口送往計算機進行五點平滑濾波、數據歸一化處理等相關數據處理,最后送入基于PSO_LSSVM的電動機扭矩軟測量模型中得到扭矩的軟測量值。該軟測量模型的精度將直接影響電動機扭矩的測量精度,是整個抽油機電動機扭矩軟測量的關鍵。
2 LSSVM基本理論
最小二乘支持向量機[4]將最小二乘線性系統理論引入支持向量機以代替傳統的支持向量機,采用二次規劃方法解決分類和函數估計問題。下面介紹用于函數估計的LSSVM的基本思想。
設樣本為n維向量,則l個樣本組成的樣本集表示為S{(xk,yk)|k=1,2,…,l}。其中,xk為輸入數據,xk∈Rn;yk為輸出數據,yk∈R。
首先利用非線性映射 ψ(?)將輸入向量從原空間Rn映射到一個高維特征空間,在這個高維特征空間中采用結構風險最小化原則構造最優決策函數,并利用原空間的核函數取代高維特征空間的點積運算以避免復雜運算,從而將非線性函數估計問題轉化為高維特征空間中的線性函數問題。設構造的最優決策函數具有如下形式:
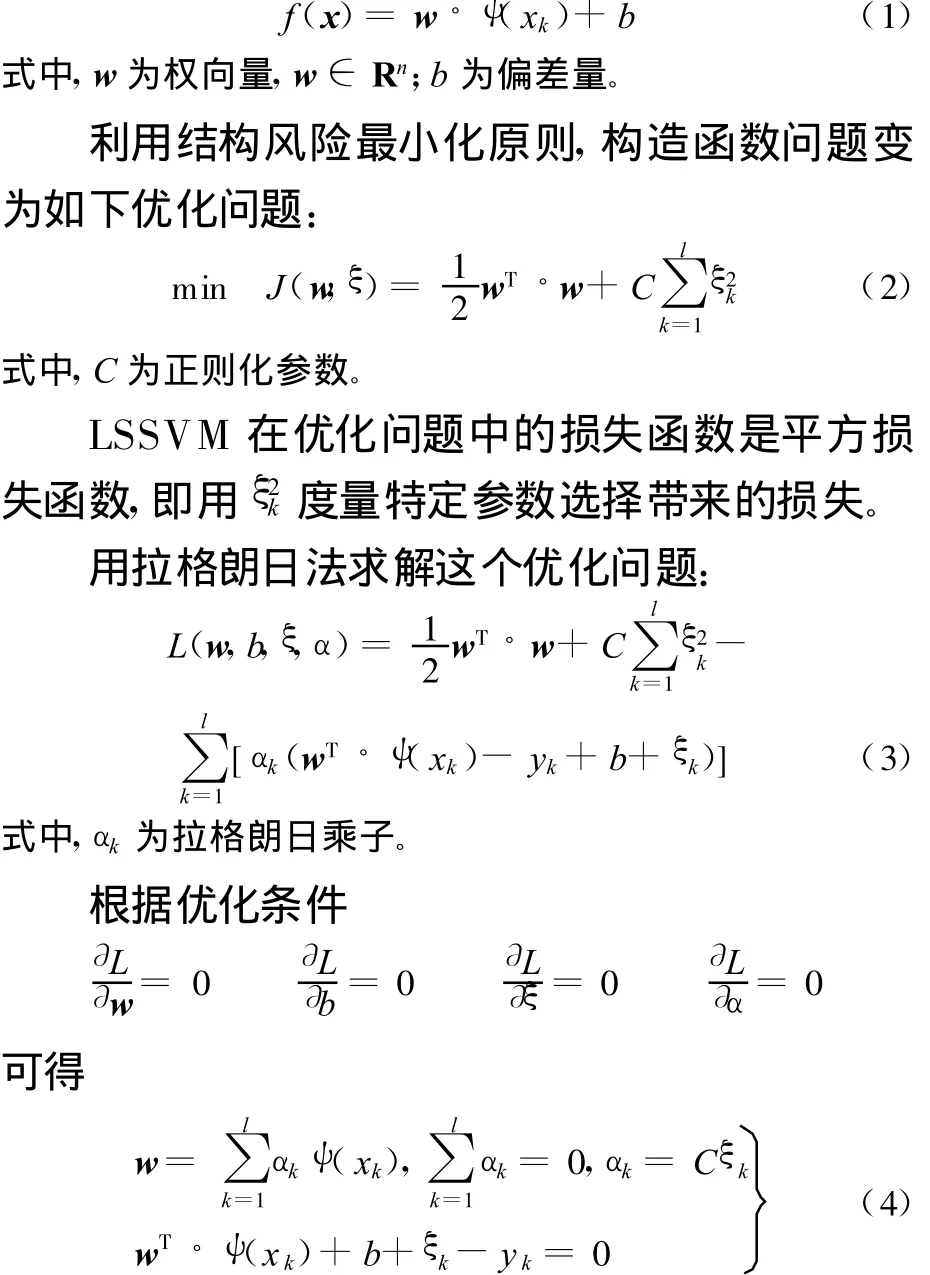
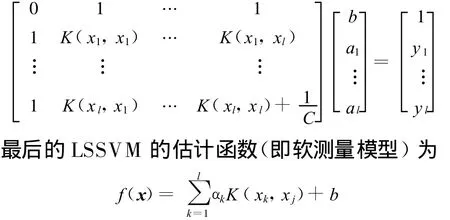
定義核函數 K(xk,xj)= ψ(xk)ψ(xj)以代替非線性映射,根據式(4)可將求解優化問題轉化為求解線性方程:
3 基于PSO_LSSVM的軟測量模型
軟測量建模的核心是核函數的選擇。通過比較,本文采用具有較強泛化能力的徑向基核函數,它只需要調整兩個重要參數:正則化參數C和高斯核參數σ,這兩個參數在很大程度上決定了LSSVM軟測量模型的學習和泛化能力。C用于控制函數的擬合誤差,C越大,擬合誤差越小,相應的訓練時間就越長,但C過大會導致過擬合;σ是核函數參數,代表徑向基函數的帶寬,σ變小,則擬合誤差會相應變小,訓練時間也相應變長,但σ過小會導致過擬合。常用的參數選取方法是交叉驗證法,然而這種方法具有盲目性且耗時長[5]。因此本文提出采用PSO方法來選取LSSVM的正則化參數C和核參數σ。
3.1 粒子群算法基本原理
PSO算法是一類新型基于群智能的隨機優化算法,它簡單、易于實現且具有很強的全局優化能力[6]。在PSO中,每個粒子根據自身的飛行經驗和群體的飛行經驗來調整自己的飛行軌跡,向最優點靠攏。對于某個粒子i,其位置表示為qi={qi1,qi2,…,qin},飛行速度表示為vi={vi1,vi2,…,vin},經歷過的最好位置記為 pi={pi1,pi2,…,pin},能獲取的群體的最好位置記為 p g={pg1,pg2,…,pgn}。在每一步中,粒子根據以下公式更新自己的速度和位置:
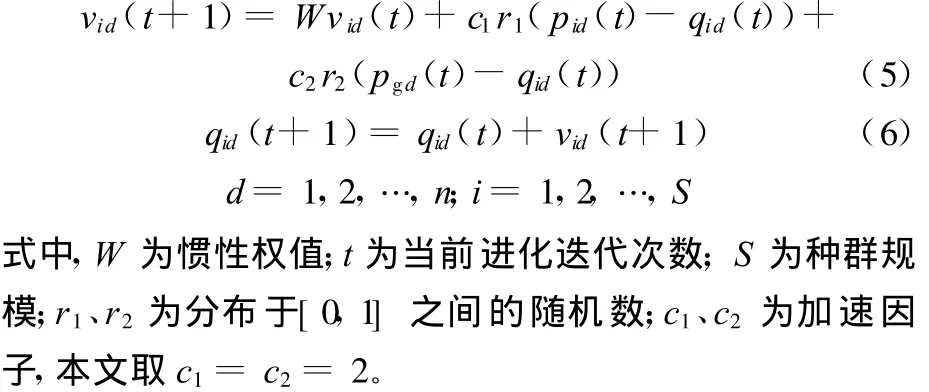
PSO中,慣性權重W 的選擇很關鍵,本文取W隨t的增大從0.9線性遞減至0.4,其中W與t的關系表達式為

式中,Tmax為最大迭代次數。
3.2 基于PSO_LSSVM的軟測量模型
基于PSO_LSSVM的軟測量模型的算法步驟如下:
(1)PSO與LSSVM的初始化。初始化加速因子c1和c2、慣性權重W 及最大進化迭代次數T max,并把正則化參數C和核參數σ映射為一群粒子,初始化粒子的位置與速度,將每個粒子的初始位置設為初始最好位置,再根據適應度函數計算每個粒子的適應值,將粒子中最小的適應值所對應的初始位置設為初始群體最好位置。這里,每個粒子的適應度函數定義為
式中,Fi為第i個粒子的適應值;yij為第j個樣本的第i個粒子LSSVM訓練輸出值;?yj為第j個樣本的 LSSVM 期望輸出值。
(2)按式(5)和式(6)更新粒子的速度和位置,生成新一代種群。
(3)根據設定的適應度函數,評價每個粒子的適應值。粒子的適應值越小,則粒子的位置越好。
(4)檢查終止條件,若滿足,則將全局最優粒子映射為正則化參數C和核參數σ,并以此為優化結果,得到一個建立好的LSSVM模型,否則轉步驟(2)。終止條件為尋優達到最大進化代數 T max或者評價值小于給定精度。
(5)用建立好的LSSVM模型進行預測。
4 扭矩的軟測量建模與仿真
用于訓練的數據來源于在 LabView開發平臺下自行研制的抽油機工況在線測試系統,該系統硬件構成如圖1所示。三相電采集模塊用于采集電動機的輸入三相電壓、電流、有用功率、無用功率、電動機的功率因素;采用轉速傳感器及其信號調理卡獲得電動機的轉速;采用扭矩傳感器及其無線接收機模塊獲取電動機輸出扭矩信號;采用載荷位移傳感器及其無線接收機測得光桿載荷和位移。這四路模塊輸出的各參量都以RS232-C信號的形式輸入到USB轉4*RS232串口轉換器模塊。該轉換器模塊再把這四路信號通過USB信號通道輸送到便攜式計算機,并在不帶串口的便攜式計算機中虛擬出四個串行通信端口。
4.1 輔助變量的選取
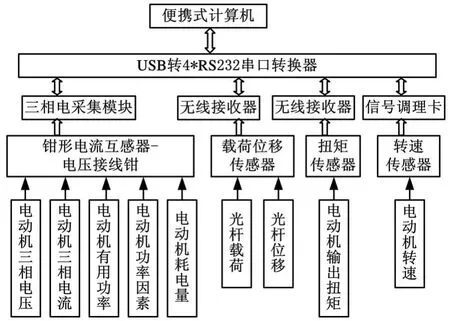
圖1 抽油機工況在線測試系統硬件組成框圖
通常情況下,抽油機電動機扭矩軟測量選擇的易測數據(即輔助變量)包括三相電壓(V A、V B、V C)、三相電流(I A、I B、I C)、有用功率、無用功率、光桿位移、懸點載荷以及轉速。這些數據都是比較容易測量的中間變量,而且它們和電動機扭矩之間也有著緊密的聯系,所以選擇這些參數作為原始的輔助變量,在建模仿真試驗后進行適當的降維以減少變量個數。通過對比試驗,本文最終選擇有用功率、無用功率、懸點載荷、光桿位移和轉速作為輸入輔助變量,這些變量都與扭矩有一定的聯系,建模時進行逐組比較從而確定出最優的輔助變量。
4.2 數據的采集與處理
本文將抽油機工況在線測試系統將百口泉采油廠J14站14004號井CYJY10-3-53HB抽油機所采集的20沖程共20×181=3620組數據作為初始數據。對每一維輸入和輸出數據進行剔除粗大誤差數據處理和五點平滑濾波處理,歸一化處理后每個輸入和輸出均映射到[0,1]區間[7]。
4.3 扭矩軟測量模型的建立
LSSVM的核函數采用徑向基核函數。在MATLAB仿真環境下,粒子群規模取50;解空間為2維,分別表示正則化參數C和核參數σ,C的取值范圍為[0,100],σ的取值范圍為[0,10];初始慣性權值W取0.9;最大迭代次數Tmax取300;加速因子c1=c2=2。最后確定C=72.6081,σ=0.2506。
4.4 扭矩軟測量模型的仿真
有用功率、無用功率、懸點載荷、光桿位移和轉速的測試數據經五點平滑濾波處理并歸一化后作為模型的輸入,扭矩測試數據經過同樣處理后作為模型的輸出對網絡進行訓練。然后讀入另外一個沖程內的181對數據對網絡進行檢驗。得到實測輸出與PSO_LSSVM軟測量模型輸出擬合曲線,如圖2所示。
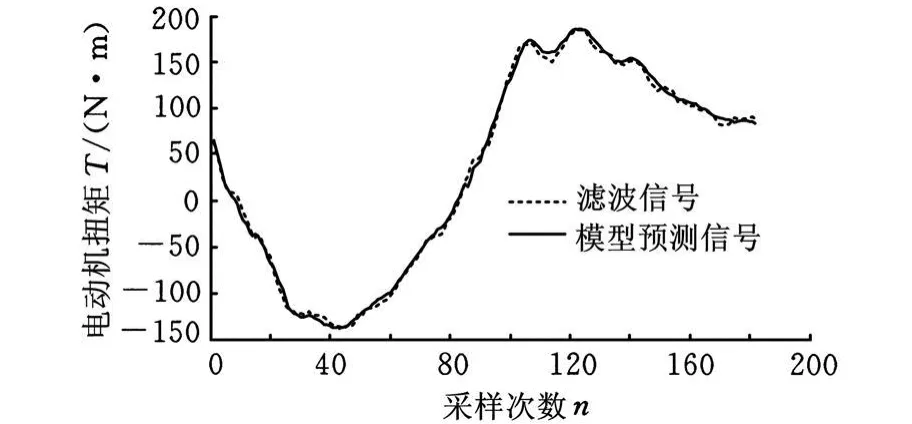
圖2 PSO_LSSVM軟測量模型仿真擬合曲線
由圖2可看出,PSO_LSSVM軟測量模型仿真值與實測信號的擬合度很高,說明該軟測量模型能有效地進行電動機輸出扭矩的軟測量。具體擬合程度為:誤差絕對平均值為3.87,誤差方差為4.76。而用優化參數后的BP神經網絡軟測量模型對同樣的樣本進行仿真,其誤差絕對平均值達到5.83,,誤差方差達到7.55。由此可知,在小樣本條件下,PSO_LSSVM軟測量模型的測量精度遠遠高于神經網絡模型的測量精度,所以該模型適合于對電動機輸出扭矩精度要求比較高的場合。
5 結束語
本文基于粒子群算法優化的最小二乘支持向量機(PSO_LSSVM)方法建立了扭矩軟測量模型,通過仿真并與實測數據比較發現,選擇合適的輔助變量并用支持向量機建模可以得到很好的測量結果,實現軟測量的目標。最小二乘支持向量機將二次規劃問題轉化為求解一線性方程問題,提高了運算速度,同時采用粒子群算法優化最小二乘支持向量機參數,能夠避免參數選擇的盲目性且大大節省時間。與神經網絡模型相比,支持向量機在樣本數量較少的情況下,可以得到比較精確的預測結果,適用于小樣本建模。因此,基于PSO_LSSVM電動機扭矩軟測量模型不但可以解決傳統測量方法存在的問題,且模型簡單,測量速度較快,能獲得較高的測量精度。
[1] 潘立登,李大宇,馬俊英.軟測量技術原理與應用[M].北京:中國電力出版社,2009.
[2] 黃安貽,廖緒兵,朱志宏,等.抽油機中電動機扭矩軟測量方法的研究[J].自動化儀表,2009,30(9):21-23.
[3] 李傳江,張自強,王麗慧.高速電主軸負載扭矩軟測量技術研究[J].計測技術,2006,26(2):9-11.
[4] 曹潔,周蓓蓓.改進的局部LSSVM算法在明膠濃度軟測量中的應用[J].工業儀器與自動化裝置,2011(1):66-69.
[5] 鄭小霞,錢鋒.基于PCA和最小二乘支持向量機的軟測量建模[J].系統仿真學報,2006,13(3):739-741.
[6] 閻威武,朱宏棟,邵惠鶴.基于最小二乘支持向量機的軟測量建模[J].系統仿真學報,2003,15(10):1494-1496.
[7] 蘇金明,張蓮花,劉波.M ATLAB工具箱應用[M].北京:電子工業出版社,2004.
Modeling of PSO_LSSVM-based Soft Measurement for Electromotor Torque in a Pumping Unit
Chen Zhen Huang Anyi
Wuhan University of Technology,Wuhan,430070
A new model of the torque soft measurement method was p resented based on PSO_LSSVM.Thismethod used particle sw arm optimization algorithm to rep lace the previous cross-validation method for model parameter's optimization,in order to avoid the blindness of the parameter choices and improve efficiency.It is verified by simulation,the softmeasurementmodel for torque of pumping unit based on PSO_LSSVM can effectively address the deficiencies of traditionalmeasurem entmethods and obtain bettermeasurement accuracy and speed,possessing benefits of an outstanding ability for small-samp le study and being easy to compute.
pumping unit;torque;softmeasurem ent;particle swarm optimization's least squares support vector machine(PSO_LSSVM)
TE355.5
1004—132X(2011)11—1333—04
2010—03—15
(編輯 蘇衛國)
陳 禎,女,1973年生。武漢理工大學機電工程學院講師、博士。研究方向為測控技術及信號處理。黃安貽,男,1965年生。武漢理工大學機電工程學院教授。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
石油石化節能(2022年12期)2022-12-30 04:45:02
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
中國煤層氣(2014年6期)2014-08-07 03:07:05