非完整約束AGV軌跡跟蹤的非線性預測控制
2011-01-29 08:46:46尹曉紅吳焱明
中國機械工程 2011年6期
趙 韓 尹曉紅 吳焱明
合肥工業大學,合肥,230009
非完整約束AGV軌跡跟蹤的非線性預測控制
趙 韓 尹曉紅 吳焱明
合肥工業大學,合肥,230009
針對存在非完整約束和控制輸入約束的三輪AGV模型,研究其非線性模型預測控制策略,提出了一種跟蹤與鎮定統一控制算法。首先由模型預測控制原理產生一個優化控制器,接著設計終端控制器及不變終端域來保證系統的鎮定,然后設計狀態觀測器以進一步提高跟蹤精度,最后設計避障控制模塊來完善整個控制器功能。該控制算法具有一般性,對所有AGV及其他輪式移動機器人的運動學模型都適用。計算機仿真結果驗證了該控制算法的正確性和有效性。
AGV;模型預測控制;鎮定;觀測器;軌跡跟蹤
0 引言
近年來,自動引導車(automatic guided vehicle,AGV)作為非完整約束輪式移動機器人(wheeled mobile robot,WMR)的一種,由于實際應用的廣泛性,其控制問題也得到了國內外學者的關注。機器人的運動控制大致可以分為鎮定控制與軌跡跟蹤控制兩類。作為一種具有非完整約束的典型系統,WMR不滿足反饋穩定的Brockett定理的必要條件,因此不能通過連續時不變狀態反饋控制方法實現機器人系統的鎮定,故從理論而言,設計鎮定控制器更具有挑戰性。但從實踐意義上來說,軌跡跟蹤更具有實際應用價值,因為即使對于鎮定控制任務,機器人也要沿某條可行軌跡運動到目標點。為了解決WMR的運動控制問題,人們已經提出各種控制方法,包括滑模控制方法[1]、反演控制方法[2]等在內的非線性控制方法,自適應控制方法[3],神經網絡控制方法[4],時變反饋控制法[5],非連續反饋控制法[6]等,取得了較好的控制效果。然而,上述傳統方法的可調參數與控制性能之間的關系不是很直觀,參數整定很費力,且在考慮實際存在控制輸入約束或狀態約束時,比較難處理。而模型預測控制(model predictive control,M PC)可以克服以上缺陷,模型預測控制利用求懲罰函數的最小化來確定最優控制輸入,參數調整容易,且狀態約束及控制輸入約束可以在優化過程中直接考慮在內,簡單明了。模型預測控制亦稱為滾動優化控制(receding horizon contro l,RHC),是近年來發展起來的一類新型計算機控制算法,由于它采用模型預測、滾動優化和反饋校正等控制策略,且其處理約束能力強,因而控制效果好,已成功應用于石油、化工、機械等比較復雜且模型不容易精確建立的工業生產過程。但是,由于源于工程控制的預測控制在設計時沒有在理論上考慮系統的閉環鎮定性,預測控制是在線反復求解開環優化問題,而開環最優不能保證閉環鎮定,因此,如何保證預測控制的鎮定性成了一個關鍵問題。
本文在研究AGV系統的非線性模型預測控制問題時,在基本的預測控制原理基礎上著重考慮了預測控制的鎮定性,設計了終端控制器和終端域,提出一種跟蹤與鎮定統一的控制策略。同時,考慮到運動過程中總會存在噪聲干擾,使得AGV自定位不夠準確,影響軌跡跟蹤,本文用一個簡單的狀態觀測器對AGV狀態進行估計,從而進一步提高控制精度。最后本文還增加了一個避障功能模塊,以此來進一步完善整個控制器功能。
1 AGV模型和預測控制模型
以具有非完整約束的三輪移動機器人小車作為控制對象,其前輪既是轉向輪又是驅動輪,結構如圖1所示。
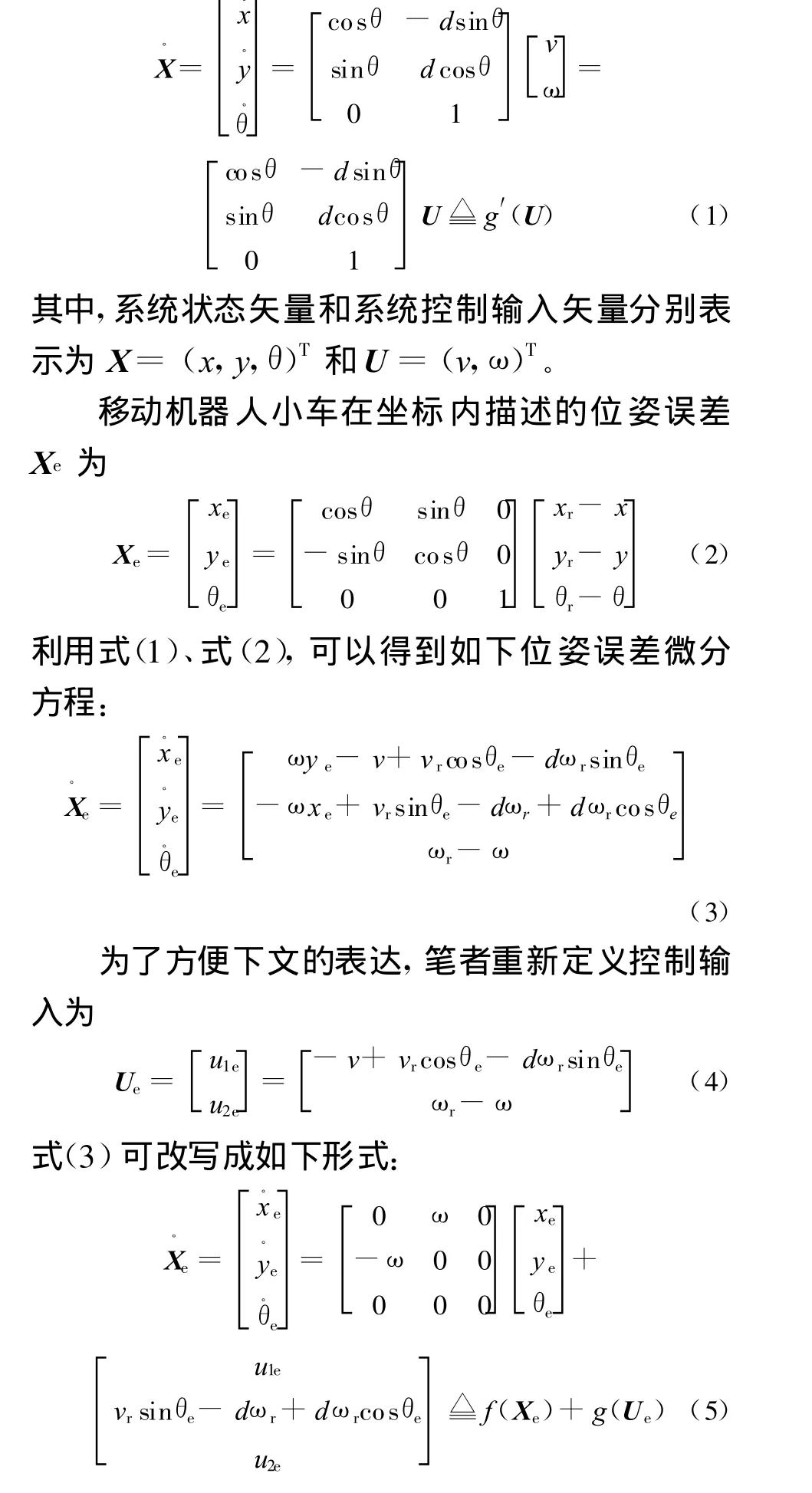
假設小車當前實際位姿為X=(x,y,θ)T,任意給定的參考位姿為X r=(x r,y r,θr)T,位姿誤差X e=(x e,y e,θe)T;當前實際速度 U=(v,ω)T,參考速度Ur=(vr,ωr)T,其中,vr為參考線速度,ωr為參考角速度。圖1中,D為后輪軸與中心軸之間的交點,M為小車質心。非完整約束意味著小車的輪子只有純滾動而無滑動,即,其中d為點D與點M 之間的距離。移動機器人小車的運動學方程如下:
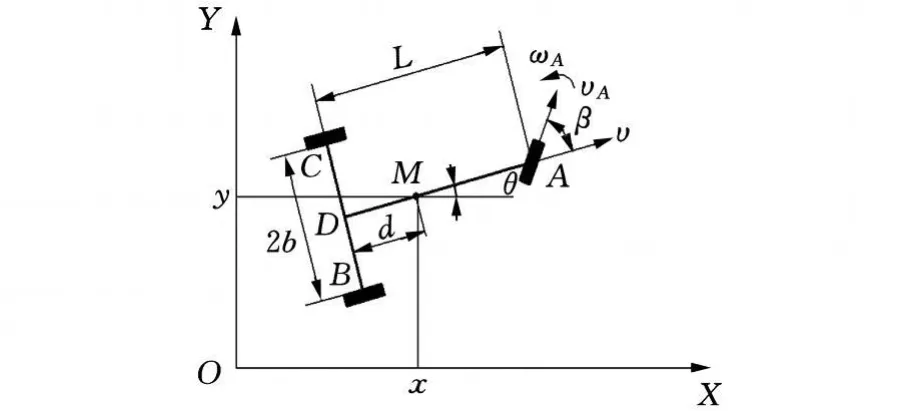
圖1 三輪AGV結構示意圖
2 軌跡跟蹤的模型預測控制算法設計
模型預測控制是一種基于模型的控制,其機理可以描述為:在每個采樣時刻,預測模型根據獲得的當前系統實際狀態信息,在線求解一個有限時域開環最優控制問題,將所得到的控制序列的第一項應用于被控系統,剩余的控制輸入丟棄,直至下一采樣周期。在下一采樣時刻測得系統的實際狀態,重復求解優化過程,即所謂的滾動優化。
然而,上述開環的過程并不能保證被控系統的鎮定。為了解決這個問題,可以在求解最優問題時在懲罰函數中加入一個終端懲罰函數項以及終端約束,并引入一個終端域的概念。本文的控制思想是把整個控制過程分成兩個控制階段:首先,在有限時域內求解最優控制問題,將獲得的最優控制輸入到系統,驅動系統使其進入到終端域;然后,利用一個終端線性反饋控制器將系統控制到平衡點。預測控制過程如圖2所示,圖中,t為當前時刻,Tp為預測時域。
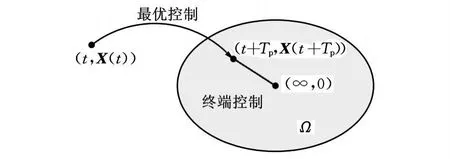
圖2 預測控制過程示意圖
因此,本文的非線性模型預測跟蹤控制思路是:系統給定AGV的參考速度U r和參考位姿X r,它們可以由路徑規劃算法求得;期望位姿Xr與由狀態觀測器觀測得到的AGV當前位姿進行比較得到AGV 全局位姿誤差矢量通過MPC控制器進行優化和終端鎮定控制,輸出得到最優控制(t,X(t)),再根據式(4),結合參考速度Ur,即可得到 AGV最優速度控制信號U*;將U*=(v*,ω*)T輸入系統對 AGV進行控制,最后在狀態反饋時再通過一個狀態觀測器來提高AGV狀態反饋精度,從而提高整個控制系統性能,實現系統全局漸進穩定。圖3為AGV非線性模型預測控制框圖。
2.1 MPC優化控制器設計
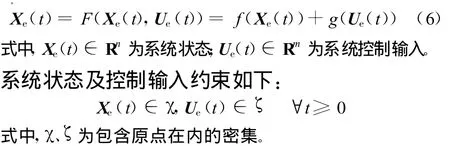
考慮由以下微分方程來描述的非線性系統:
此外,由于觀測誤差直接影響控制效果,為了能更加準確地估計AGV的當前位姿,本文為其設計了狀態觀測器。同時,針對有時候參考軌跡上會出現意外的障礙的情況,為了讓整個控制功能更加完整,本文還考慮了避障功能模塊。
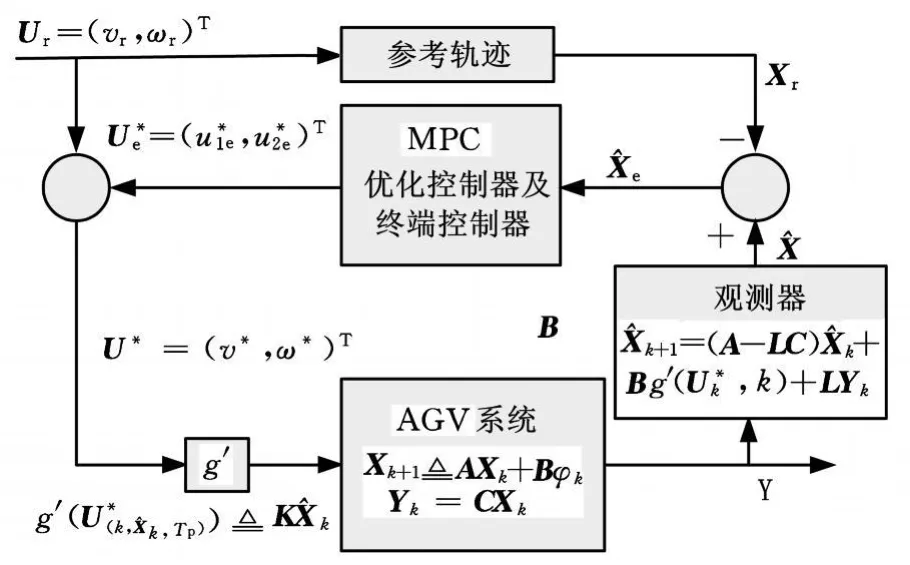
圖3 控制框圖
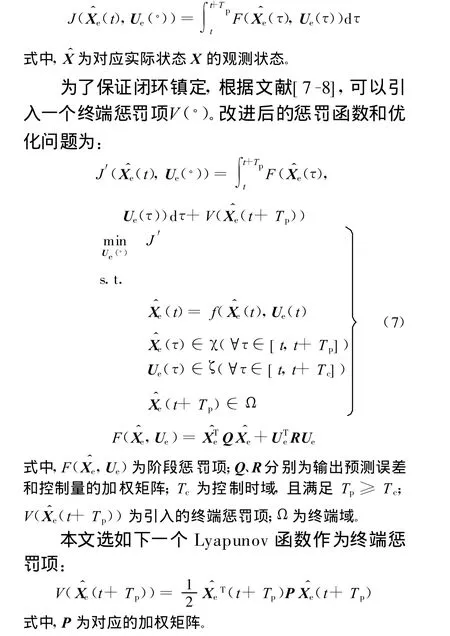
選取懲罰函數為預測狀態及相應控制輸入的二次函數:
2.2 MPC終端控制器設計
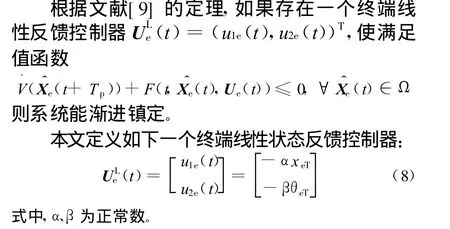
為了表示區別,我們用X eT=(x eT,y eT,θeT)T代表終端狀態下的位姿誤差,其中,xeT為終端狀態下的x方向位置誤差;yeT為終端狀態下的y方向位置誤差;θeT為終端狀態下的θ姿態角誤差。

綜上,結合控制框圖3,控制算法步驟可以概括如下:
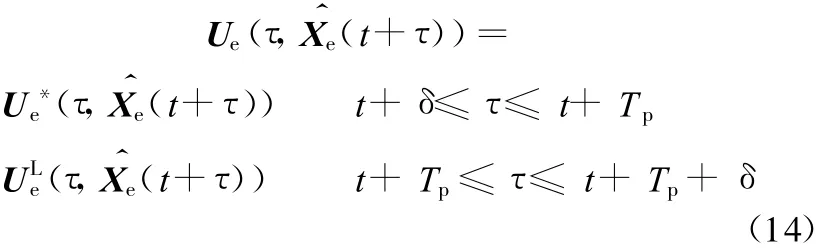
(2)設δ為采樣時間,在下一采樣周期t+δ時刻,根據反饋得到的此刻的系統實際狀態信息(t+δ)重新解決最優化問題(式(7)),獲得此刻的最優控制輸入(t,(t+δ)),則直接取該最優控制輸入作為系統控制輸入。如果此刻還在預測時域T p內(即t+δ≤τ≤t+T p),則直接取該最優控制輸入作為系統控制輸入;否則,如果此刻已經超過預測時域T p(即t+T p≤τ≤t+Tp+δ),則上面終端域設計的終端控制器啟用,取上述終端控制器的作為系統控制輸入。即輸入系統的控制輸入矢量應為
(3)重復上面的步驟直至達到滿意的控制效果。
2.3 狀態觀測器設計
上述模型預測算法需要在每個采樣時刻由狀態觀測器觀測系統狀態并據此更新優化問題的初始條件,從而滾動優化計算當前時刻的預測控制量。顯而易見,優化問題的最優解是關于觀測狀態的函數,在這里我們引入一個優化控制器增益矩陣K的概念。

2.4 避障模塊設計
假設AGV小車上部環繞安裝有若干個紅外傳感器,它們能隨時隨地檢測到前方的障礙物信息并反饋給小車控制器,以便能及時調整軌跡跟蹤控制方案使之避過障礙物而不發生碰撞。對于移動障礙物,可以利用預測控制的方法來預測下一個T p的障礙物位姿信息以及障礙物移動速度,并通過計算類似上面的優化問題來獲得系統的最優控制輸入。設小車共環繞安裝有Ns個紅外傳感器,第 j個的傳感器測得的障礙物信息為[θob,j d ob,j](j=1,2,…,N),其中,θob,j為第j個
傳感器與前方障礙物的夾角;dob,j為第j個傳感器距離前方障礙物的直線距離。

3 仿真研究
為了驗證本文所提出的控制算法的正確性和有效性,在MATLAB環境下編程,對AGV進行仿真計算和性能分析比較。
AGV期望軌跡取以(0,0)為圓心,以1為半徑的圓,參考速度為v r=0.2m/s,ωr=0.2m/s。AGV小車實際初始值取x(0)=1.2m,y r(0)=1.2m,y r(0)=-0.3m,θ(0)=2π/3,v(0)=0.4m/s,ω(0)=0.3rad/s。
(1)在僅使用基本的模型預測跟蹤控制率而不使用所設計的終端控制器的情況下,對AGV小車進行跟蹤控制仿真,取基本模型預測控制器性能加權矩陣Q=diag(0.5,0.5,0.5),R=diag(0.1,0.1),預測時域與控制時域取為 Tp=T c=1s,采樣周期取為δ=0.1s,即向前預測步數為N=10。跟蹤效果如圖4所示。
(2)結合所設計的預測模型終端控制器和狀態觀測器對AGV進行仿真試驗,取模型預測控制器性能加權矩陣P=diag(1,1,1);性能系數取為α=2,β=1。預測時域T p、控制時域T c和采樣周期δ參數設置同上。圖5為AGV小車的跟蹤效果圖。
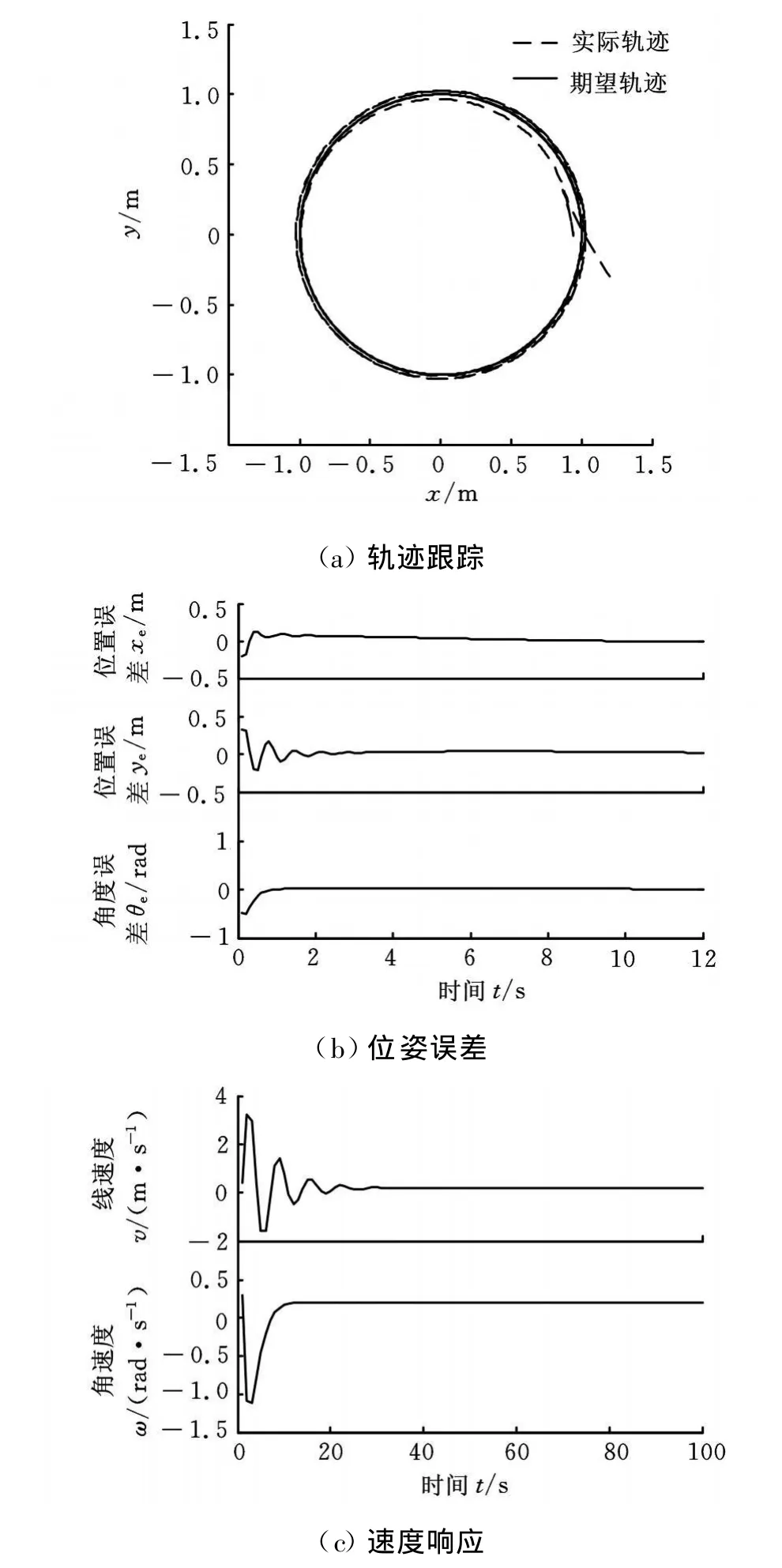
圖4 不使用所設計的終端控制器的情況下的仿真結果
此外,為了驗證所設計避障模塊的有效性,對期望軌跡為簡單的直線運動的AGV進行避障仿真試驗。設期望軌跡上有四個障礙,避障控制器的系數取為kob=1.5,c1=0.1,c2=10,圖6是小車躲避靜態障礙物的效果圖。
比較圖4和圖5仿真結果可見,由于本文所設計的控制律在設計時就考慮控制約束和終端鎮定,而且在相應控制輸入作用下,跟蹤軌跡具有最優意義,同時狀態觀測器也進一步提高了反饋精度,因此在滿足輸入約束的前提下,系統能夠在較短時間段內跟蹤指定軌跡,取得良好的跟蹤性能,表現為跟蹤路徑平滑、跟蹤快、速度平穩。從圖4可以看出,如果在設計控制器時不考慮實際存在的控制約束和終端鎮定,閉環系統就很有可能會失去了穩定性保證,也就很難獲得令人滿意的跟蹤效果。此外,圖6避障仿真結果同時也驗證了所設計的避障功能模塊的有效性。
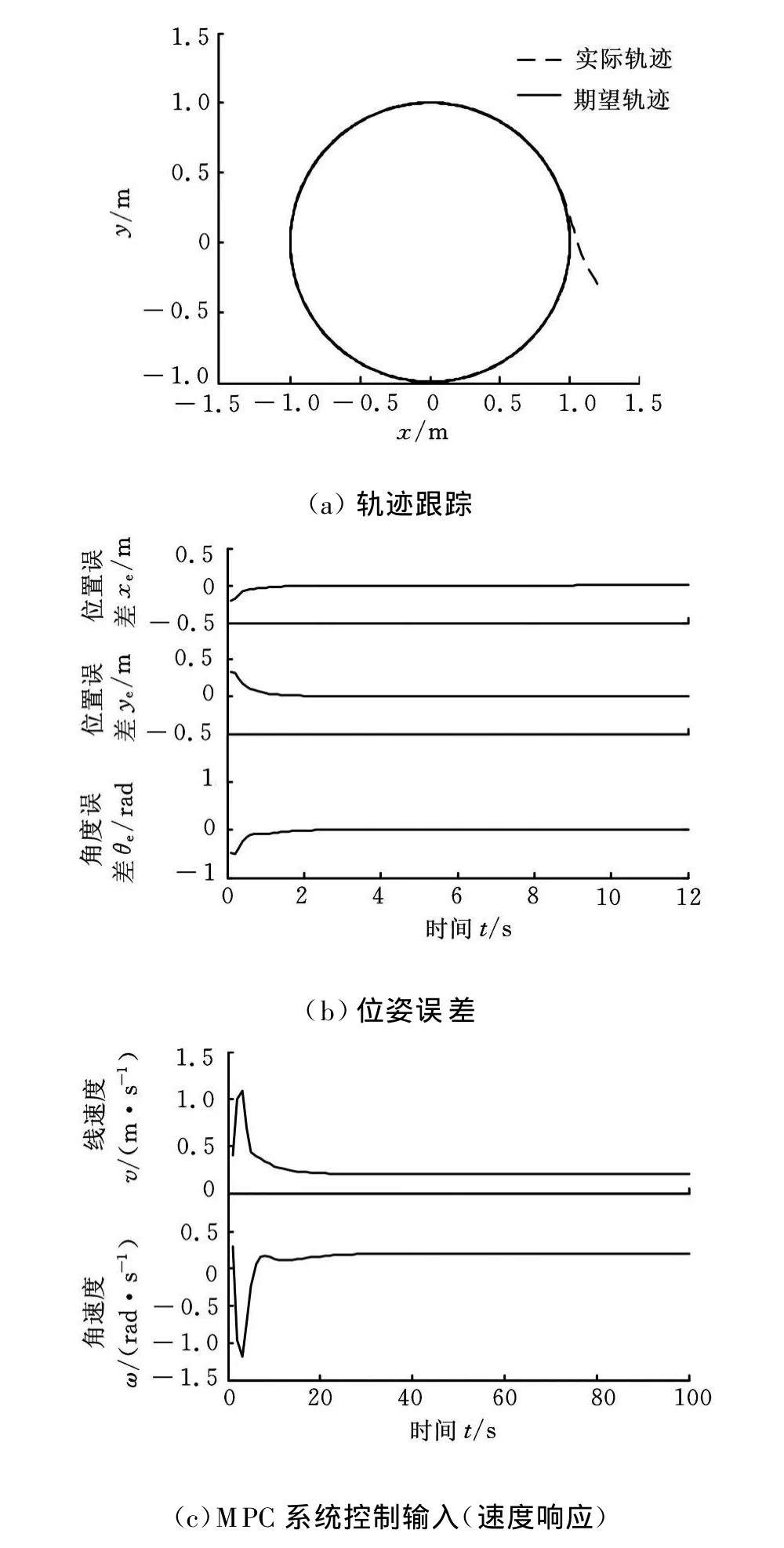
圖5 使用所設計的終端控制器的情況下的仿真結果
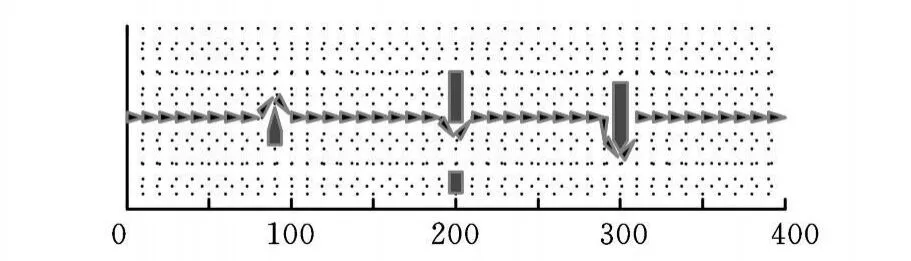
圖6 AGV避障仿真結果
4 結論
以三輪AGV為研究對象,研究存在非完整約束和控制輸入約束的AGV軌跡跟蹤的非線性模型預測控制問題,設計了一種終端鎮定控制器,并結合AGV的運動模型,使用狀態觀測器對含噪聲的動態系統進行狀態估計,進一步增強軌跡跟蹤控制的效果,實現了系統全局漸進穩定。此外還考慮AGV的避障功能,設計了一種避障控制算法。計算機仿真結果證實了所設計軌跡跟蹤算法的有效性和實時性。
[1] 閆茂德,吳青云,賀昱曜.非完整移動機器人的自適應滑模軌跡跟蹤控制[J].系統仿真學報,2007,19(3):579-581.
[2] Dierks T,Jagannathan S.Control of Nonholonomic Mobile Robot Formations:Backstepping K inematics into Dynam ics[C]//16th IEEE International Conference on Control Applications,Part of IEEE Multi-conference on Systems and Control.Singapore,2007:94-99.
[3] Farzad P,Mattias PK.Adaptive Controlof Dynamic Mobile Robots with Nonholonom ic Constraints[J].Computers and Electrical Engineering,2002,28:241-253.
[4] Lin Sheng,Go ldenberg A A.Neural-netw ork Controlof Mobile Manipulators[J].IEEE Transactions on Neural Networks Manipulators,2001,12(5):1121-1133.
[5] Samson C.Controlof Chained Systems:App lication to Path Following and Time-varying Point-stabilization of Mobile Robots[J].IEEE Transactions on Automatic Contro l,1995,40:64-77.
[6] Fontes F A C C,Magni L.M in-max Model Predictive Controlof Nonlinear Systems Using Discontinuous Feedbacks[J].IEEE Transactions on Control System Techno logy,2003,48(10):1750-1755.
[7] Chen H,Allgow er F A.Quasi-infinite Horizon Non linear Modelp redictive Control Scheme with Guaranteed Stability[J].Automatica,1998,14(10):1205-1217.
[8] Mayne D,Raw ling J,Rao C,et al.Const Rained Model Predictive Control:Stability and Optimality[J].Automatica,2000,36:789-814.
[9] Timm F,Rolf F.Nonlinear Model Predictive Pathfollowing Control[J].Lecture Notes in Control and In formation Sciences,2009,384:335-343.
Non linear Model Predictive Control of Trajectory Tracking for Nonholonomic AGV
Zhao Han Yin Xiaohong Wu Yanming
Hefei University of Techno logy,H efei,230009
Considering the kinem atic model o f three-wheeled AGV w ith non-holonomic constraint and input saturation,a nonlinearm odel predictive controlwas studied and an united control algorithm of tracking and stability was proposed.Firstly,an optimal controllerwas obtained based on the princip les of model predictive control.Second ly,a terminal controller and an invariantterm inal region were designed in order to keep the AGV system stable.Then,the noise problem of state estim ation w as solved by using a state observer,which im proves the localization precision and enhances the control effectiveness.Finally,a module was designed to avoid obstacle.The designed control algorithm has generality for kinematic model of other wheeled mobile robots.Computer simulation results show its correctness and validness.
automatic guided vehicle(AGV);model predictive control;stability;observer;trajectory tracking
TP24
1004—132X(2011)06—0681—06
2010—05—24
國家“十一五”支撐計劃資助項目(2006036003131);國家高技術研究發展計劃(863計劃)資助項目(2006AA 11A 109)
(編輯 蘇衛國)
趙 韓,男,1957年生。合肥工業大學機械與汽車工程學院教授、博士研究生導師。主要研究方向為數字化設計與制造、汽車、智能車、磁力機械等。發表論文300余篇。尹曉紅,女,1985年生。合肥工業大學機械與汽車工程學院博士研究生。吳焱明,男,1968年生。合肥工業大學機械與汽車工程學院副教授。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
現代裝飾(2020年7期)2020-07-27 01:27:42
數學物理學報(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
