干摩擦下含間隙碰撞振動系統的動力學行為分析
2011-01-29 08:00:30王樹國劉大亮翟海峰
武漢科技大學學報 2011年5期
王樹國,陳 英,劉大亮,楊 昊,翟海峰
(1.蘭州交通大學數理與軟件工程學院,甘肅蘭州,730070;2.蘭州交通大學博文學院土木工程系,甘肅蘭州,730070;3.蘭州交通大學機電工程學院,甘肅蘭州,730070)
機械系統中廣泛存在干摩擦結構,摩擦帶來磨損,使機械零件或部件之間出現間隙,產生運動副的分離與碰撞以及嚴重的系統振動與噪聲,從而降低機械系統的精度和運轉效率,甚至會導致整臺機器的破壞。因此,干摩擦下碰撞振動系統的動力學行為分析引起了眾多學者的關注。Shaw[1]研究了一單自由度簡諧激勵分段線性系統周期運動的穩定性,并分析了干摩擦系統的動力學響應以及由于摩擦導致的分岔行為(岔式分岔、Hopf分岔)。Cone等[2]采用數值方法分析了干摩擦單自由度雙面沖擊振子,結果表明系統存在周期倍化系列和黏滑碰撞運動。本文給出干摩擦下含間隙的雙自由度碰撞振動系統的滑動、黏滑和碰撞運動方程以及銜接條件,應用數值方法,結合理論分析,對該系統在帶速變化條件下的分岔現象進行研究,并討論激勵振幅和干摩擦對該系統黏滑及擦切運動的影響。
1 干摩擦碰撞振動系統模型
圖1所示為干摩擦下雙自由度碰撞振動系統的動力學模型。質量為M1的振子M1由剛度為K1的彈簧和阻尼系數為C1的黏性阻尼器相連接,振子M1與皮帶之間存在干摩擦力F1,作用在振子M1上的簡諧激勵為P1sin(ΩT+τ);質量為M2的振子M2由剛度為K2的彈簧和阻尼系數為C2的黏性阻尼器相連接,振子M2與皮帶之間存在干摩擦力F2,作用在振子M2上的簡諧激勵為當M1與M2的位移差絕對二者發生碰撞。皮帶的速度為V。

圖1 雙自由度摩擦碰撞振動系統模型Fig.1 Double-degree-of-freedom friction collision vibration system model


可將式(1)化為





2 系統的周期運動及穩定性

由于流的解析解很難給出,對于P這樣的映射一般借助數值方法來進行研究。通過映射P可以得到P的Jacobi矩陣DP,根據矩陣DP的特征值λi可以判斷圖1所示碰撞振動系統周期運動的穩定性和局部分岔[3-8]。
3 數值分析
在適當的參數下,振子的運動呈現周期性,并且圖1所示系統具有對稱性,在一定參數下系統會出現對稱的碰撞運動。假設在n個激勵周期內,經歷了p次右碰撞,q次左碰撞,k次黏滑后,系統運動重復,則稱為n-p-q-k運動。取系統的基本參數為:μm=0.5,μk=0.5,μc=0.5,ζ=0.1,v=0.1,R=0.8,f0=1.0,以ω為控制參數分析摩擦力對系統分岔形式、黏滑和非黏滑碰撞的影響。
圖2為ω∈[2.5,13]時M1的分岔圖。首先分析u1=0.1的情況(見圖2(a)),ω∈[11.955,13]時M1呈現出穩定的周期1-1-1-0對稱運動,ω∈(10.289,11.955)時M1呈現出穩定的周期1-1-1-0非對稱運動,ω=10.289時M1呈現出穩定的周期2-2-2-0運動,同時隨著ω遞減為9.895,M1的運動將通過倍周期分化通向混沌,ω∈(8.736,9 .825)時M1呈現出穩定的周期1-2-1-0運動,ω=8.736時M1呈現出穩定的周期2-4-2-0運動,同時隨著ω遞減為8.445,M1的運動也將通過倍周期分化通向混沌。
圖3為u1=0.1時M1的黏滑及擦切圖。此時,M1在ω∈(6.162,8.736]區間內的黏滑運動不明顯,在ω∈[2.5,6.162]區間內的黏滑運動則比較明顯。ω∈[5.395,6.162]時M1呈現穩定的周期2-2-2-1運動(見圖3(a)),ω∈(4.532,4.732]時M1呈現穩定的周期1-3-2-1運動(見圖3(b)),ω=4.532時M1呈現穩定的周期2-6-4-2運動,同時隨著ω遞減為4.450,M1的運動將通過倍周期分化通向混沌。ω∈[2.5,4.450)時M1呈現的黏滑現象更明顯,此時M1主要以倍周期分化通向混沌。

圖2 M 1的分岔圖Fig.2 Bifurcation diagram of M1

圖3 u1=0.1時M 1的黏滑及擦切圖Fig.3 Stick-slip and brush cut diagram of M 1 when u1=0.1
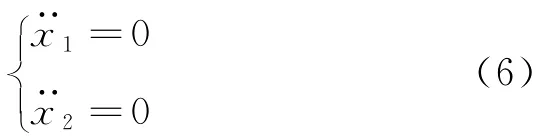
下面討論增大摩擦力(u1=0.2)時的情況,此時M1的分岔圖見圖2(b),M1的黏滑及擦切圖見圖4。ω∈[7.5,13]時M1的黏滑運動不明顯,此時M1主要以倍周期分化通向混沌。ω∈[2.5,4.505]時M1不僅有明顯的黏滑運動,而且有擦切運動。ω∈(4.279,4.505]時M1呈現穩定的周期1-3-2-1運動(見圖4(a)),ω=4.279時M1發生擦切運動(見圖4(b))。ω∈(4.145,4.279]時M1呈現穩定的周期1-4-2-1運動,當ω=4.145或ω=3.965時M1再次發生擦切運動(見圖4(c)),并最終通過擦切運動通向混沌。
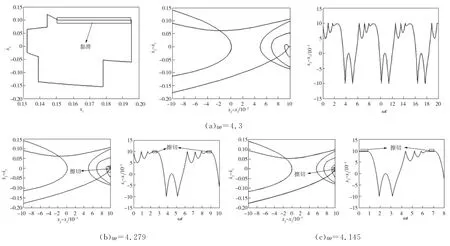
圖4 u1=0.2時M1的黏滑及擦切圖Fig.4 Stick-slip and brush cut diagram of M 1 when u1=0.2
減小摩擦力(u1=0.01)時,M1的分岔圖見圖2(c),此時M1在ω∈2.5,][13區間內的黏滑運動不明顯。
系統其他基本參數不變,當u1=0.1時,M1在不同激勵振幅條件下的分岔行為如圖5所示。由圖5可見,在ω=4.2的條件下,當f0=0.1時,M1呈現穩定的周期1-2-3-0運動,當f0=0.4時,M1呈現穩定的周期1-1-1-0運動,當f0=0.95時,M1呈現穩定的周期1-3-2-1運動;在ω=5.1的條件下,當f0=0.1時,M1呈現穩定的周期2-4-4-0運動,當f0=0.4時,M1呈現穩定的周期1-1-1-0運動,當f0=0.95時,M1呈現穩定的周期2-4-4-2運動。

圖5 不同激勵振幅下M 1的分岔圖Fig.5 Bifurcation diagram of M1 under different incentive amplitudes
4 結論
(1)系統存在叉式分岔,并由對稱周期運動變為反對稱的周期運動,進而通過周期倍化分岔通向混沌。
(2)在一定的帶速下,系統主要以倍周期分岔為主,干摩擦較小時系統黏滑現象不明顯,而干摩擦較大、激勵頻率不太大時系統黏滑現象非常明顯,并且存在擦切運動。
(3)在一定帶速和干摩擦下,激勵振幅越大,系統越容易發生黏滑運動。對于此類系統,可以通過調整干摩擦和激勵振幅來抑制系統的黏滑現象。
[1] Shaw S W.On the dynamic response of a system with dry friction[J].Journal of Sound and Vibration,1986,108:305-325.
[2] Cone K M,Zadoks R I.A numerical study of an impact oscillator with addition of dry friction[J].Journal of Sound and Vibration,1995,188(5):659-683.
[3] Ding W C,Xie J H.Interaction of Hopf and doubling bifurcations of a vibro-impact system[J].Journal of Sound and Vibration,2004,275(1-2):29-45.
[4] 丁旺才,張有強,謝建華.含對稱間隙的摩擦振子非線性動力學分析[J].摩擦學學報,2008,28(2):156-160.
[5] 羅冠煒,張艷龍,謝建華.含對稱剛性約束振動系統的周期運動和分岔[J].爆炸與沖擊,2007,4(7):45-50.
[6] 李萬祥,牛衛中.一類含間隙系統的分岔與混沌的形成過程[J].振動與沖擊,2000,24(3):48-49.
[7] 羅冠煒,謝建華,孫訓方.兩自由度塑性碰撞振動系統的周期運動與穩定性[J].蘭州大學學報,2000,36(3):62-66.
[8] 林梅,丁旺才,武俊虎.兩點碰撞振動系統的周期運動與分岔[J].動力學與控制學報,2000,4(1):17-21.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(2020年6期)2020-09-10 07:22:44
電子制作(2018年18期)2018-11-14 01:48:24
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
山東工業技術(2016年15期)2016-12-01 05:31:22
