工業機器人視覺測量的優化校準
2011-02-09 01:58:04劉丹
制造業自動化 2011年10期
劉 丹
(湖南商務職業技術學院,長沙 410205)
0 引言
在先進自動化生產過程中,工業機器人視覺測量系統對關鍵尺寸進行在線實時監測,及時調整動作幅度和角度,可有效控制產品質量的穩定性[1,2]。由于結合了非接觸測量方式和機器人運動靈活的優點,可以解決傳統三坐標測量機對盲孔、深孔等的測量難題,也可以克服接觸式測量頭對復雜工件的干涉,在先進制造業中得到了逐漸推廣和應用。實際的工業現場環境復雜,多種因素都有可能導致系統在運行過程中產生一定的偏差、測量精度降低,引起誤差的原因主要有溫度漂移和關節松動變形等,使測量模型的參數值改變從而導致定位誤差增大,因此需要定期對工業機器人視覺測量系統進行精確的校準,從而實現精確定位和視覺測量。目前,國內外關于該領域的研究還比較少,也沒有解決好工業機器人視覺測量的精確校準難題。本文對工業機器人的視覺測量誤差模型進行了相關研究,建立了針對顯著變化參數的測量誤差模型,采用遺傳算法去求解最優的模型參數,從而達到精確校準,可以滿足工業機器人實際生產的要求。
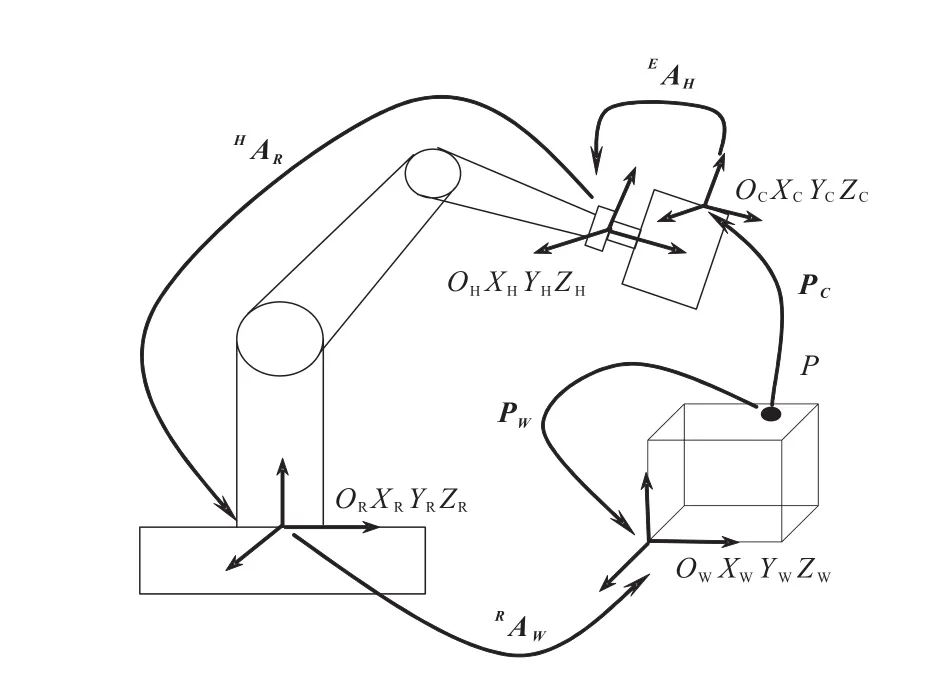
圖1 測量系統工作原理
1 工業機器人測量系統工作原理
圖1為應用于工業機器人的測量系統工作原理示意圖。圖中共存在4個坐標系,分別為機器人基礎坐標系ORXRYRZR、機器人末端關節坐標系OHXHYHZH、工件坐標系OWXWYWZW和視覺傳感器坐標系OCXCYCZC。
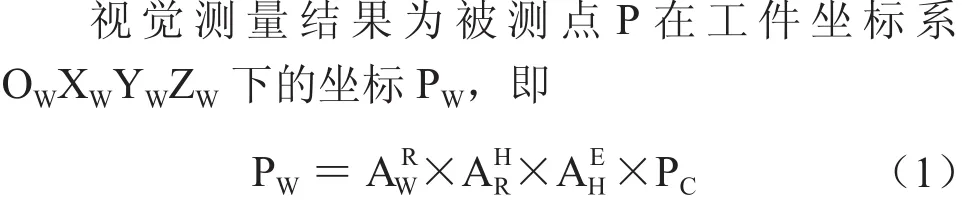
式(1)中,PC為被測點P在視覺傳感器測量坐標系下的坐標值;為機器人手眼關系,即機器人末端關節坐標系到視覺傳感器測量坐標系的齊次坐標變換關系,一旦傳感器安裝到末端關節上就保持不變;為機器人基礎坐標系到裝置坐標系的齊次坐標變換關系,工位安裝完成后同樣為定值;為機器人末端關節坐標系到機器人基礎坐標系的齊次坐標變換關系,即

2 機器人視覺定位誤差模型
采用D-H模型[3]對機器人進行分析,假設每個關節都存在連桿參數偏差,那么傳感器坐標系相對于機器人基礎坐標系的變換為

結合變換微分可以推導出末端關節相對于機器人基礎坐標系的位置偏差為
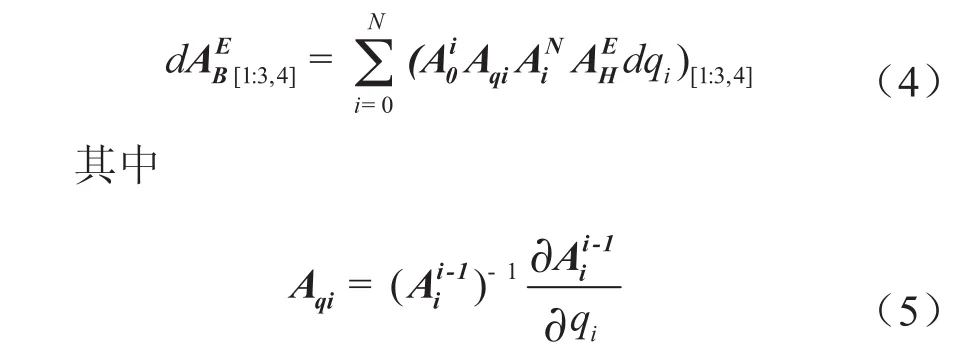
表示第 i個關節的連桿參數 qi、ai、ai、di,下角標[1:3,4]表示取對應矩陣第4列的1至3行。
為了說明本文的校準方法,這里以ABB2400型機器人為例,是一種典型的6關節工業機器人。
關節1單獨轉動時對機器人6個不同姿態的TCP進行了測量,關節2和關節3單獨轉動時各測量了5個不同姿態下的TCP坐標值,關節4、關節5和關節6單獨轉動時分別測量了9個、6個和10個不同姿態下的TCP坐標值。關節單獨轉動時,以關節2、關節3和關節4產生的偏差最明顯,然而,當關節2和關節3同時轉動時,TCP在y方向的定位偏差反而減小,這說明關節2和關節3同時轉動會對y軸方向的誤差有抵消作用。
結合大量的實驗數據進一步分析,當關節1轉動時,7個姿態中只有x方向的坐標出現了較大偏差,若考慮測量噪聲的存在,其它方向的坐標值可以認為沒有變化,對照機器人運動學模型,可以確定此時桿件長度參數a1產生了較為明顯的變化。結合實際測量樣本值,并以此類推,可以采用同樣的方法總結出有可能產生較大變化量的模型參數如表1所示,分別描述了與各個關節關系較大的模型參數,這也是引起測量誤差的主要因素和原因。只要我們能夠確定出表1中的有關模型參數的準確值,就可以較好地實現工業機器人視覺測量的校準。
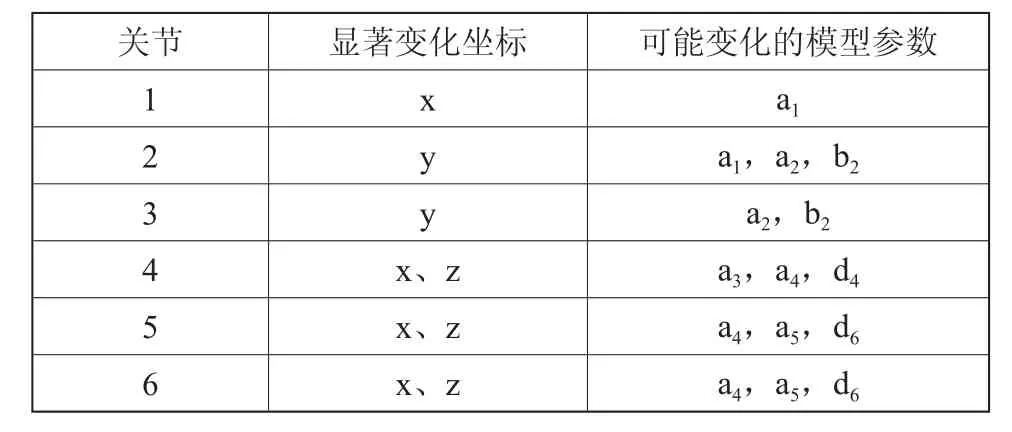
表1 機器人視覺測量誤差模型
3 基于遺傳算法的精確校準方法
由表1的分析可知,對于6關節的ABB2400型機器人,當發生溫度漂移或者關節松動變形時,引起視覺定位中的某一些參數值發生變化,因而為了實現精確校準,就需要根據實際樣本數據來尋找到最佳的參數值。根據上述分析可知,對于視覺測量校準而言,主要是對表1的模型參數予以尋優,當參數優化后,就可以克服溫度漂移和關節松動變形等的影響,從而提高視覺測量準確度。這里采用遺傳算法對這些參數予以優化,優化后得到的參數值將具有很好的測量準確度。
遺傳算法(Genetic Algorithm)[4,5]是一類借鑒生物界的進化規律(適者生存,優勝劣汰遺傳機制)演化而來的隨機化搜索方法。它是由美國的J.Holland教授1975年首先提出,其主要特點是直接對結構對象進行操作,不存在求導和函數連續性的限定;具有內在的隱并行性和更好的全局尋優能力;采用概率化的尋優方法,能自動獲取和指導優化的搜索空間,自適應地調整搜索方向,不需要確定的規則。遺傳算法的這些性質,已被人們廣泛地應用于組合優化、機器學習、信號處理、自適應控制和人工生命等領域[4,5]。
遺傳算法主要有遺傳、交叉、變異等幾個模擬生物進化的過程組成,遺傳算法的框架可非形式地表示如下:
Genetic_algorithm ()
{
t=1;/*變量t表示迭代代數*/
初始化候選群體Population (t);
計算各個解的適應值;
do while (終止條件不滿足)
{
隨機地將種群中的個體兩兩配對,進行交配操作;
執行變異操作;
利用選擇機制形成下一代候選解:
Population (t+I) =Selection (Population (t));
t=t+ 1:
}}
遺傳算法主要的特點體現在智能性和本質并行性兩個方面.遺傳算法智能性是由于在確定了編碼方案、適應值函數及遺傳算子后,利用演化過程中獲得的信息自行組織搜索,因此具有根據環境的變化自動發現環境的特性和規律的能力;而其并行性是由它全局搜索方式決定的。按照遺傳算法的程序,根據實際測量的樣本數據值就可以計算得到最佳的模型參數值,以此得到確切的視覺測量值,避免溫度漂移和關節松動變形等對測量結果準確度的影響。
4 仿真研究
這里我們選取了100組實際測量樣本數據為依據來建立精確的視覺測量校準值,其中遺傳算法的參數值為種群數為30,二進制碼長度為20,交叉概率為0.45,變異概率為0.1。當采用遺傳算法優化后,就可以根據新尋優的參數值作為視覺測量校準的精確值,從而得到比較準備的視覺測量結果。
仿真實驗中,針對各個關節松動變形和溫度漂移的情況,予以了實驗驗證,仿真結果如表2所示,描述了校準前和校準后的誤差情況。表2的仿真結果表明,相比于校準前的誤差值,根據本文方法校準后,視覺測量的準確度大大提高了,視覺測量的誤差顯著減小了,從而驗證了本文算法的有效性。
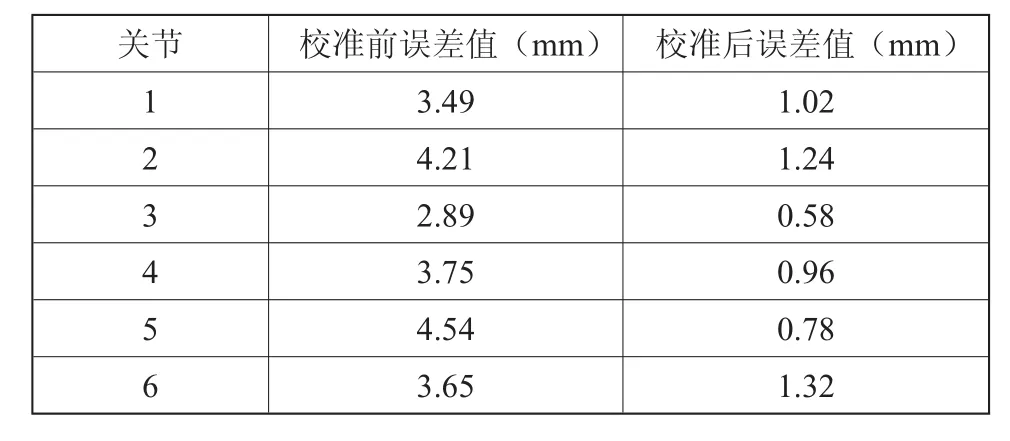
表2 視覺測量校準仿真結果
5 結束語
針對工業機器人視覺測量系統,本文提出了一種基于遺傳算法的優化校準方法,首先根據機器人的D-H正向運動學模型和微分運動學模型建立末端關節坐標系的定位誤差模型,然后利用遺傳算法選擇最優的參數值,從而實現了精確校準。仿真實驗表明,該方法能大大減小視覺測量誤差,可以滿足實際生產的要求。
[1] 王一, 劉常杰, 任永杰, 等. 通用機器人視覺檢測系統得全局校準技術[J]. 光學精密工程, 2009, 17(12): 3028-3033.
[2] 任永杰, 邾繼貴, 楊學友, 等. 機器人柔性視覺檢測系統現場標定技術[J]. 機器人, 2009, 31(1): 82-87.
[3] Denavit J, Hartenberg R S. A kinematic notation for lowerpair mechanisms based on matrices[J]. Journal of Applied Mechanics, 1955, 22(2): 215-221.
[4] 吉根林. 遺傳算法研究綜述[J].計算機應用與軟件, 2004,21(2): 69-73.
[5] 李敏強. 遺傳算法的基本理論與應用[M]. 科學出版社,2002.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03
