基于EtherCAT的高性能伺服電機組的現場總線控制系統研究
2011-02-09 01:57:06施大發
制造業自動化 2011年4期
施大發
(湖南機電職業技術學院,長沙 410151)
0 引言
隨著工業生產設備向著系統化、規模化的方向發展,基于工業以太網的運動控制系統在一些數控系統中得到了很廣泛的應用,工業以太網通信具有傳輸速度快,通信數據量大等種種優點,對推動機電一體化設備的快速發展起到了很大的作用。隨著網絡通信技術的不斷發展,目前,在一定程度上,網絡伺服系統成為當前伺服系統發展的主要方向之一。在此情況下,德國BECKHOFF公司推出了Ether CAT現場總線技術,它具有配置簡單,數據傳輸高速、高效等種種優點。而且,在網絡結構上,幾乎支持所有的拓撲類型,包括線型、樹型、星型等,每個系統可以配置多達65535臺設備,這種總線類型對于大規模的運動控制系統的設計具有很好的優勢,本文對基于Ether CAT 的高性能伺服電機組的現場總線控制系統進行了一定的設計研究。
1 控制系統總體架構設計
基于Ether CAT的控制系統一般采用的是主從式的架構,主站由PC機配置標準的以太網卡來擔任,從站一般采用專用芯片進行設計,主站起到主要的系統控制作用,向總線上的設備發送相應的命令,從站根據自己的地址取出相應的控制命令,根據命令進行伺服電機的運動控制動作。本系統從站的設計采用倍福公司推出的從站控制器ET1100和單片機進行設計,系統的總體架構如圖1所示:

圖1 基于Ether CAT的現場總線控制系統總體結構圖
伺服電機的運動控制系統屬于閉環調節系統,由運動控制器,伺服驅動器,伺服電機以及相關的位置或者速度檢測裝置組成,其中最常見的檢測裝置是編碼器,各個部分通過線纜連接在一起完成高性能的伺服電機的控制功能。圖2是全閉環運動控制系統的結構框圖。
伺服運動控制系統的作用是接受上位機信號,驅動被控對象按照指令進行運動,保證運動部件的快速性和準確性,從一定程度上來說,上位機控制信號也可以算是運動控制器的一部分,該系統中,主站運動控制部分與Ether CAT總線以及從站單片機部分共同構成了伺服電機組的現場總線運動控制器。伺服電機編碼器作為系統的反饋裝置。同時從伺服電機運動控制的實時性和準確性方面考慮,運動控制采用雙閉環控制,其中由伺服驅動器和編碼器構成了反饋內環,由于伺服驅動器反應的快速性,保證了該系統調節的實時性。由單片機、伺服驅動器和編碼器構成了外閉環控制,通過一定的軟件計算方法保證了運動的準確性。
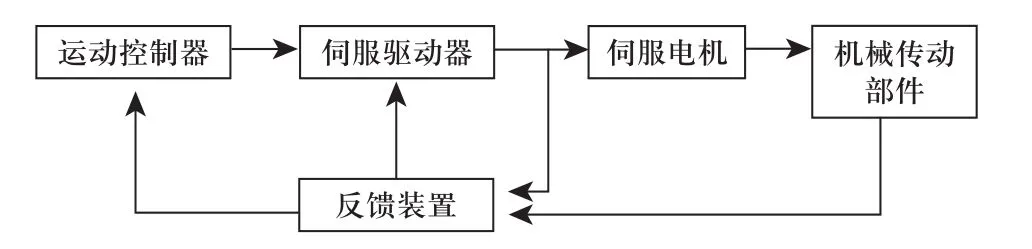
圖2 全閉環運動控制系統的結構框圖

表1 ET1100資源表
2 主站設計研究
Ether CAT主站的作用是發起通訊,而且,兩個從站之間要進行通信,必須要把主站當做中間路由器,通過主站完成。從原理上來說,Ether CAT不支持兩個主站之間的通信,但是,如果其中的一個主站具有從站的功能是,也可以在兩個主站之間進行通信。主站在設計的硬件方面并沒有特別的需求,只需要一塊標準的以太網卡即可,主站的功能基本上是靠軟件來實現的。本系統中,利用VC編寫的應用程序根據用戶的相關設置,將用戶的命令轉化成相應的命令控制字,對命令控制字進行打包、發送和接受等過程。另外,該軟件功能還包括解析系統硬件組成及相關文件,提供與網卡的接口,并提供與其他網絡協議間的接口,完成于其他系統及通信協議的對話功能。
3 從站系統設計研究
Ether CAT網絡中,最多可以有65535個從站結點,而從站結點從結構上來說,又可以分為簡單結點和復雜結點,其中簡單結點一般利用從站控制器自身的I/O資源就可以實現相應的功能,本系統選用倍福公司推出的從站控制器ET1100,本身帶有豐富的I/O資源,如表1所示。
本系統采用的是復雜結點的方式,由從站控制器ET1100和單片機共同實現從站功能。完成從Ether CAT網絡中讀取數據,并進行數據交換等應用程序的功能。
從站應用程序控制器通過中斷方式讀取Ether CAT網絡中的非周期性的數據,而通過查詢的方式存取周期性的數據,從而執行相應的應用程序。
從站控制器除了完成與Ether CAT網絡中的其他設備進行通信以外,更重要的是將Ether CAT上接受到的控制命令轉化成伺服驅動器的指令,完成相應的閉環控制功能。從一定程度上來說,伺服電機組的運動控制的性能決定于從站的設計,一般來說,常用的伺服控制有三種方式,包括速度控制方式、轉矩控制方式以及位置控制方式,其中位置控制方式是利用脈沖來進行控制的,通過單片機的I/O可以模擬脈沖發生器,完成相應的控制功能,而速度和轉矩控制方式都是利用模擬量來進行控制的,利用單片機控制時,要利用一定的DA轉換功能或者單片機的模擬量輸出口進行。本系統設計了具有位置控制、速度控制和轉矩控制三種控制模式的硬件接口電路,可以很好的實現對不同的控制對象的不同的控制要求。驅動器的反饋信息可以通過編碼器來讀取,也可以通過驅動器的控制口讀到對應的轉矩和轉速,通過AD轉換電路轉換以后,讀入單片機進行處理。
與從站硬件系統的結構相對應,從站單片機的軟件控制包含兩個部分的內容,一部分是系統的通信功能,單片機與ET1100進行通信連接,完成與上位機系統的通信過程,另外一部分是用于對伺服系統的控制和伺服系統反饋數據的采集,軟件的工作過程如下:首先,單片機開機進入程序的初始化階段,這個階段的主要工作是完成從站相應的配置工作,包括建立主站和從站之間的通信,初始化相關的寄存器,設置通信類型等,然后,完成初始化工作,程序進行周期運行的階段,等待Ether CAT總線上控制命令的到來,當接收到響應的控制命令時,則對該命令進行一定的處理,然后發送給驅動器,然后,讀取驅動器反饋信息,進行數據的打包處理,將驅動器讀到的反饋信息打包成固定格式的子報文結構,并反饋回Ether CAT總線,從而反饋到主站控制器部分。完成通信的過程,從站軟件的流程圖如圖3所示。
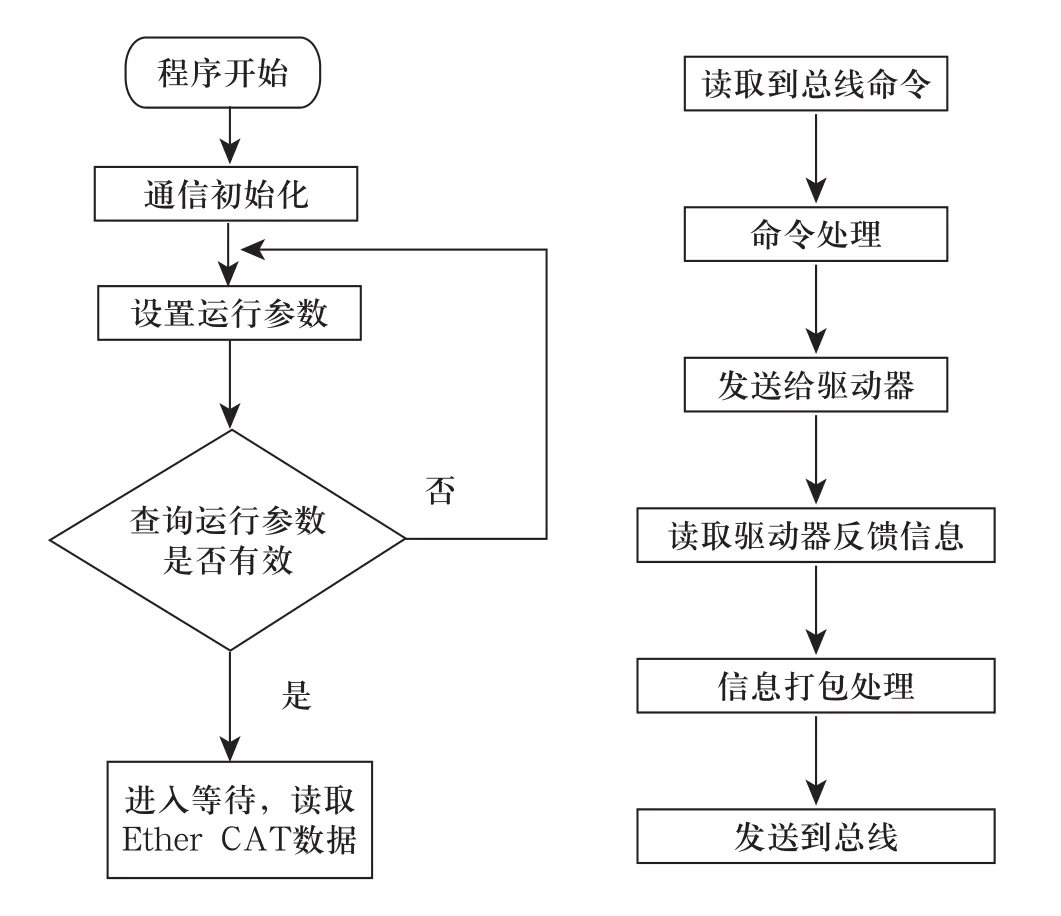
圖3 從站單片機程序流程圖
4 結論
Ether CAT工業以太網具有成本低、時效性高、擴展性強等種種優點,隨著工業生產設備向著智能化、規模化等方向發展,在未來的工業控制領域必將成為工業網絡的發展主流。
本文對基于Ether CAT的高性能伺服電機組的現場總線控制系統進行了一定程度的研究,研究了該系統的主題框架,對現場總線控制系統的主站以及從站的軟件和硬件進行了設計。系統的實際運行結果表明,系統具有很好的實時性和準確性,能夠滿足高性能伺服電機組的現場控制的實際需求。可以很好的運用于數控設備和工業機器人中。
[1] Beckhoff G, Ether CAT: The Ethernet fieldbus[z], Ether CAT Technology Group, 2006.
[2] 許大中.交流電機調速理論[M].浙江:浙江大學出版社出版. 1997.
[3] 何國軍.陳維榮.劉小強.孫叢軍.基于DSP與FPGA的運動控制器設計[J].電子技術應用.2009(7).
[4] 謝香林.李木國.Ether CAT網絡及其運動控制系統研究.中國科技論文在線.http://www.paper.edu.cn.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
