車頭時距對道路通行能力的修正系數研究
2011-02-09 09:05:46黃華華蔡冬軍
重慶建筑 2011年6期
黃華華,蔡冬軍
(重慶中設工程設計有限公司 重慶 400023)
引言
城市道路通行能力是城市道路網規劃、道路工程可行性研究、道路工程設計、施工項目后評估、道路交通管理等工作的重要依據。目前,我國在此方面雖然進行了大量研究,但是尚未形成統一的、完整的方法,仍然缺少適合我國國情的參數、模型,以及較合理的道路通行能力分析體系。城市道路通行能力影響因素眾多,且各因素之間相互關聯相互影響。如何對通行能力的影響因素作出準確合理的判斷及分析是擺在交通工程人面前亟需解決的問題。本文在綜合分析前人研究成果的基礎上,對通行能力的影響因素進行仔細分析,通過分析不同影響因素下車頭時距的規律來分析各影響因素。
1 道路通行能力修正系數
城市道路是指在城市范圍內,供車輛及行人通行的,具備一定技術條件和設施的道路。[1]道路通行能力又稱道路容量(Capacity),是指道路的某一斷面在單位時間內所能通過的最大車輛數。[2]美國HCM對道路通行能力給出了如下定義:通常,一種設施的通行能力,規定為在一定時段和道路、交通、管制條件下,能合情合理地期望任何車輛通過車道或道路的一點或均勻斷面上的最大小時流率。HCM將道路通行能力分為基本通行能力、可能通行能力和設計通行能力[3]。
基本通行能力是指道路和交通處于理想條件下,由技術性能相同的一種標準車,以最小的車頭時距連續行駛的理想交通流,在單位時間內通過道路斷面的最大車輛數,用公式表示為:

其中t0為最小車頭時距,l0為最小車頭間距,v為行車速度。
可能通行能力是指考慮到道路和交通條件的影響,并對基本通行能力進行修正后得到的通行能力,實際上是指道路所能承擔的最大交通量,用公式表示為:

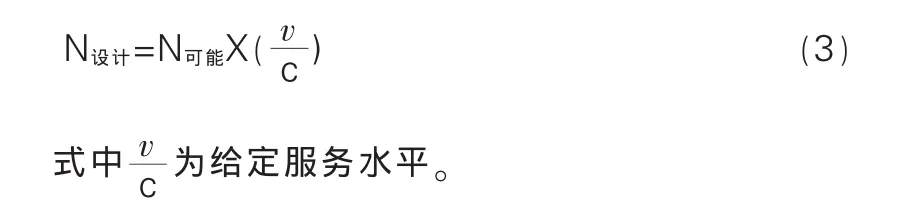
設計通行能力是指用來作為道路規劃和設計的標準而要求道路承擔的通行能力。用公式表示為:
道路通行能力影響因素較多,主要歸納為四條:道路條件、交通條件、管制條件以及其他條件。通過對城市道路通行能力影響因素的分析,并參考國內外相關研究成果,選擇車道寬度、交叉口間距、道路線形、車輛類型共四個主要影響因子,重點分析各因子對道路通行能力的影響,通過各影響因素修正系數對通行能力進行修正。
通行能力修正系數綜合考慮各種因素對通行能力的影響,但是各種因素的影響程度大小不一,需要找到一種通用的度量尺度對影響程度作出統一的衡量。本文以車頭時距作為度量通行能力的尺度,對道路通行能力修正系數進行研究。
2 車頭時距對通行能力的修正系數研究
通過對基本通行能力、可能通行能力、設計通行能力公式的分析發現,道路通行能力主要由車頭時距決定,車頭時距不是常數,而是隨車速隨機變化的,其主要受駕駛員自身特性、車輛性能,以及道路交通環境的影響。根據前面分析,本文選取道路通行能力的四個主要影響因子即車道寬度、交叉口間距、道路線形、車輛類型,分析其對車頭時距的影響,進而度量其對城市道路通行能力的影響。
2.1 車頭時距對車道寬度修正系數的分析
城市機動車行車速度與車道寬度有著密切的聯系。根據交通心理學研究,行車速度越大,駕駛員視野越窄,對車道寬度的變化感覺越明顯。車道寬度越窄,駕駛員感覺到壓迫性越強,心理感覺側向安全距離不夠,進而會適度減速,增大車頭時距。圖1為某城市調查路段車速分布圖,可以看到,隨著車道寬度的增加,平均車速和85%位車速都呈上升趨勢。當車道寬度在小于3.5m時,平均車速較為分散,在35~45km/h范圍上下波動;當車道寬度大于3.5m時,平均車速提高到50km/h左右。85%位車速的分布也與平均車速相似,但較為發散。
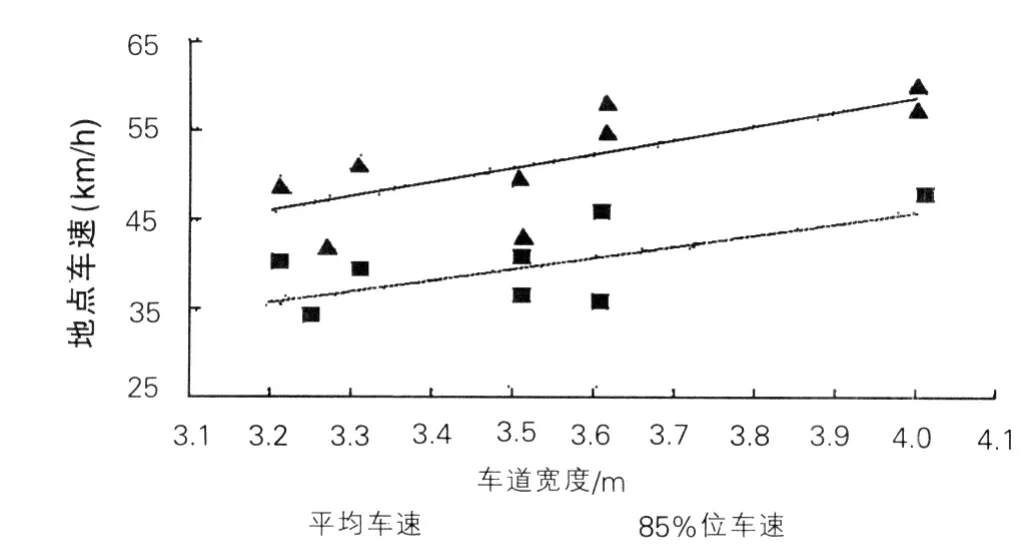
圖1 某山區城市各調查路段車速分布圖
研究表明,道路的通行能力受車道寬度影響,其影響可以用影響系數[4]來表示,如表1所示。
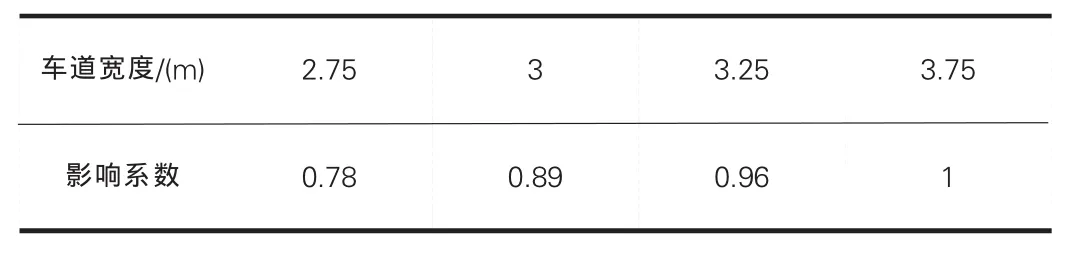
表1 車道寬度對道路通行能力的影響系數表
2.2 車頭時距對交叉口間距修正系數的分析
城市道路交叉口分為平面交叉口和立體交叉口,結合道路的功能和交叉口的控制方式,平面交叉口間距可以分為信號交叉口的間距、無信號接入口的間距、支路與交叉口的間距。本文分析平面信號交叉口間距通過影響車頭時距對道路通行能力產生的影響。
研究發現,信號交叉口密度的增大會造成車輛出行時間和出行延誤的增多,每個交通信號會使速度減少2~3km/h,從而影響車頭時距。以每英里兩個交通信號作為基準,出行時間和交通信號數目的關系如表2所示。從中發現每英里道路上交通信號從兩個增加到8個后,出行時間增加了39%。
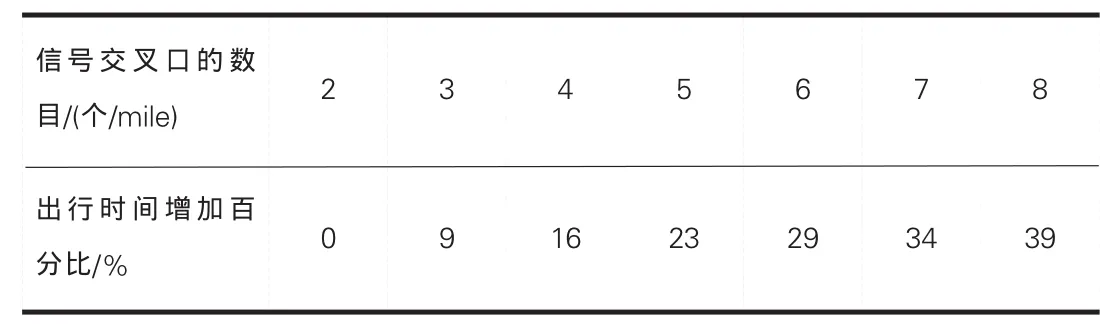
表2 信號數與出行時間的關系
信號交叉口間距主要從行車安全、通行能力、交通延誤等方面考慮。國外對速度、信號間距及周期三者關系進行了研究分析,發現行駛速度隨著信號交叉口間距的增加而增加,隨著信號周期的增加而降低,間距越大信號周期的設置范圍越廣。綜合考慮安全和運營的因素,理想的模型[5]如下。

式中:s為信號交叉口的間距,m、C為信號周期,s、v為車輛運行速度,km/h。
2.3 車頭時距對道路線形修正系數的分析
從提高道路通行能力的角度來講,起點和終點之間取直線其距離最短,然而由于受地形、地質等自然條件的制約,必然形成道路平面上轉折,縱面上起伏。道路平面通常都是由直線段和曲線段組成,縱面由上坡或下坡的直線段的豎曲線組成,這在山區城市中顯得尤為突出。山區城市地形起伏較大,道路坡度大,對機動車車速影響較大,從而影響車頭時距。以下從三個方面分析山區城市道路線形修正系數通過影響車頭時距對道路通行能力的影響[6]。
(1)行車視距。從行車安全的觀點來看,是指駕車者視力所能清楚看到前方行駛的一段必要路程。駕駛員只有在看清前方路面上的障礙物、迎面駛來的車輛及各種交通標志,有充分的時間和足夠距離采取有效措施的前提條件下才能提高行車速度。
(2)道路曲線半徑。由于汽車在曲線上行駛受到橫向離心力的作用,可導致側滑或傾翻,因此,為了保證行車的平順與舒適,避免因橫向離心力、縱向離心力過大,引起車輛的側滑、傾翻、顛簸和汽車彈簧超載,我國對城市道路所允許的最小曲線半徑及各級豎曲線最小半徑及豎曲線最小半徑和最小長度均進行了規定。曲線半徑過小時,駕駛員須將車速降得很低才能通過,既影響車頭時距進而影響道路的通行能力,也帶來不安全因素。研究表明,當曲線半徑在600m~700m以下時,相對事故率急劇增加。因此,為了提高道路的通行能力,降低事故率,在條件許可的情況下,曲線半徑適當增加是很有必要的。
(3)道路坡度。道路的極限坡度一般是根據汽車的爬坡性能、道路等級,所經地區的自然因素等確定的。等級越高,行車密度越大,要求的行車速度越高,希望縱坡越平緩,以保證較大的通行能力。但是,地形起伏、海拔高度、氣候(包括氣溫、雨量、濕度)等因素都在不同程度上影響汽車的爬坡能力。汽車爬坡能力的降低,必然影響車頭時距,從而影響該段道路的通行能力。
2.4 車頭時距對車輛性能修正系數分析
車輛性能指標綜合了車型、制動性和車內環境等車輛性能差異。其中車輛類型分布是影響通行能力的主要交通流特性。在給定路交通設施上,一旦交通流中的車輛種類中有大型車和兩輪車等的混入,會對道路通行能力產生較大的影響,主要影響包括:
(1)大型車混入。大型車由于其車體大,所占空間大、道路長,它的加速、減速和保持車速的性能均較其它小客車差,故在上下坡時與前車的距離會加大,影響其它車輛行駛。
(2)低檔摩托車、帶發動機的兩輪車的混入。由于兩輪車的車速遠比汽車低,它們混在一起使用道路,為了安全,互爭道路空間,就大大影響了各車輛行駛時的通行能力。
3 動態車頭時距模型的建立
車頭時距對具體的駕駛員而言僅在小范圍內波動,對整體分布特性而言,它服從概率分布,取值在1~3s之間,故在靜態車頭時距跟馳模型的基礎上,對車頭時距進行動態修正,建立動態車頭時距模型,其核心公式[7]為:
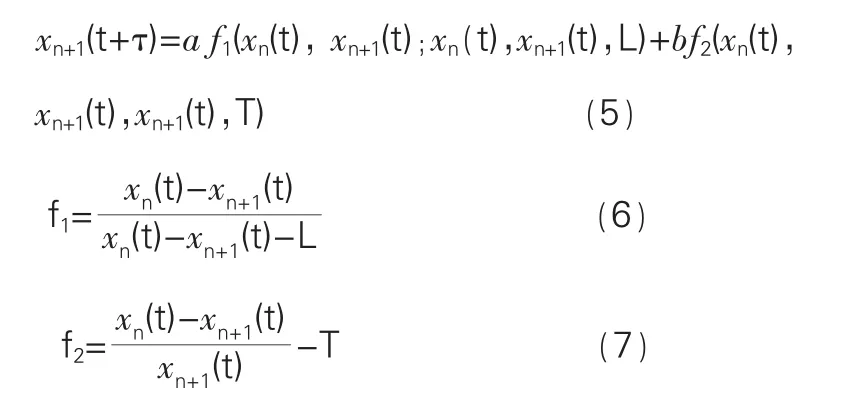
式中:τ為駕駛員反應時間;a為駕駛員對車速和距離的反應參數;b為駕駛員對車頭時距的反應參數;L為車身長度;T為動態車頭時距。
綜合分析前面影響車頭時距的道路通行能力修正系數,對T進行修正,修正過程歸納為三個方面:
(1)駕駛員方面,影響因素包括其自身的年齡、性別、經驗、身體狀況和駕駛傾向性等。研究證明,年齡、性別等差異導致的駕駛行為差異最終都表現為駕駛員緊密跟隨意愿的強弱,所以選用緊密跟隨意愿來表征駕駛員自身特性差異。
根據緊密跟隨意愿強弱,把車頭時距取值范圍1~3s均分為10等份,對應從最激進1型到最保守10種類型。駕駛員緊密跟隨意愿越弱,跟馳行為越保守,車頭時距越大;反之,駕駛員緊密跟隨意愿越強,跟馳行為越激進,車頭時距越小。一般駕駛員跟馳時,車頭時距大多落入5、6、7型,受駕駛員自身特性影響的車頭時距取值范圍則為1.8~2.4s[7]。這種取值基于車輛平穩行駛的假設,但是,如果車輛不能平穩運行,駕駛員車頭時距取值會有所增加。
(2)車輛性能方面,選用前后車跟隨類型為指標對期望車頭時距進行修正,因為該指標可以綜合車型、制動性和車內環境等車輛性能差異。
交通流中車流是跟隨行駛的,研究中將所有前導車和后隨車分為小車跟隨小車,大車跟隨小車,小車跟隨大車,大車跟隨大車四種類型[8],即:
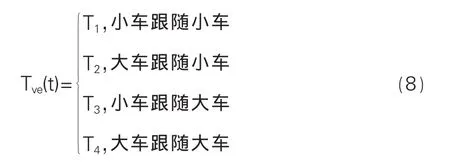
由相關研究可知,上述4種跟車類型的期望車頭時距的關系大致是:T1 表3 不同跟車類型下的期望車頭時距 (3)道路環境方面,綜合車道寬度、交叉口間距、道路線形因素指標,對車頭時距進行修正,得到修正后的期望車頭時距。道路環境方面對車頭時距的修正常采用韋布爾模型進行修正,由于涉及因素復雜,本文未進行深入研究。 將期望車頭時距進行人車路差異修正后即可得: 式中:μ、η、γ為權重系數,且μ+η+γ=1;T(t)為期望車頭時距;Tdr(t)、Tve(t)、Tlo(t)分別為經駕駛員自身特性、車輛性能、道路交通修正后的期望車頭時距。 將經修正得出的期望車頭時距代入基本通行能力計算公式中,得到修正后的通行能力計算公式如下式表示: 通行能力修正系數綜合考慮各種因素對通行能力的影響,但是各種因素的影響程度大小不一,需要找到一種通用的度量尺度對影響程度作出統一的衡量。本文以車頭時距作為度量通行能力的尺度,對道路通行能力修正系數進行研究。同時,現有跟馳模型把期望車頭時距視為常量,沒有考慮各種影響因素對車頭時距的影響,不能描述交通流的動態性。本文通過對各種因素對道路車頭時距的影響分析,研究在靜態車頭時距跟馳模型的基礎上,建立了動態期望車頭時距的跟馳模型,以很好地反應前后車的車速變化情況,進一步降低平均絕對誤差值,更接近實際交通流特性。 本文在分析國內外研究現狀的基礎上,提出動態期望車頭時距的修正模型,由于研究時間限制,尚無法提供實測數據對模型參數標定,在接下來的工作中將根據實測數據進一步完善相關模型及參數。 [1]張維全,周亦唐,等.道路勘測設計[M].重慶:重慶大學出版社,2002. [2]張起森,張亞平.道路通行能力分析[M].北京:人民交通出版社,2002. [3]徐吉謙.交通工程總論[M].北京:人民交通出版社,2002:83—120. [4]李軍,李儉全,李劍.城市道路車道寬度計算模型的修正研究[J].2010,(8). [5]毛林鋒,陸建.平面交叉口間距對道路交通的影響[J].交通科技,2006,(5). [6]賈曉敏.城市道路通行能力影響因素研究[D].長安大學碩士學位論文,2009. [7]喻丹,吳義虎.一種基于動態期望車頭時距的跟馳模型[J].長沙理工大學,2007,12. [8]周靜,陳森發.微觀交通流中跟馳模型的仿真研究[J].東南大學學報(自然科學版),2004,34(4):545—548.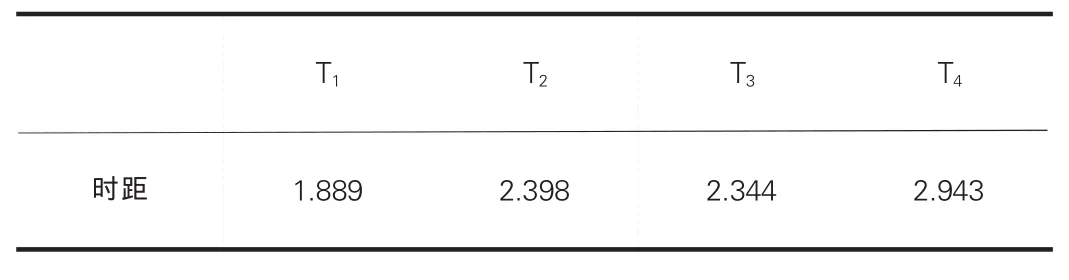


4 結語
猜你喜歡
發明與創新(2022年30期)2022-10-03 08:40:56
汽車實用技術(2022年14期)2022-07-30 06:13:42
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
汽車實用技術(2022年4期)2022-03-07 06:07:20
當代陜西(2021年2期)2021-03-29 07:41:24
人大建設(2018年6期)2018-08-16 07:23:10
文理導航·科普童話(2017年5期)2018-02-10 19:42:14
中國塑料(2016年3期)2016-06-15 20:30:00
公民與法治(2016年4期)2016-05-17 04:09:26
小星星·閱讀100分(低年級)(2015年10期)2015-10-22 08:30:04