水下滑翔機縱傾運動的自適應積分反演控制
2011-02-22 07:30:40陳宇航嚴衛(wèi)生高劍杜亮
兵工學報 2011年8期
陳宇航,嚴衛(wèi)生,高劍,杜亮
(西北工業(yè)大學 航海學院,陜西 西安710072)
0 引言
浮力驅動式水下滑翔機依靠移動內部質量塊和改變壓載艙質量(浮力調節(jié))實現(xiàn)水下鋸齒形滑翔運動[1]如圖1所示。俯仰角的跟蹤控制對于水下滑翔機完成水下偵察、海洋觀測、海底地形繪制等任務具有重要的意義。Naomi 等人[2]基于試驗級水下滑翔機“ROGUE”的線性化模型提出了LQR 最優(yōu)控制方法。Graver[3]系統(tǒng)分析了滑翔機的結構及水下運動特性,針對“ROGUE”滑翔機進行了更深入的研究,提出了滑塊加速度的控制模式。Nina 等人[4]運用PID 控制方法設計了前饋/反饋控制器對滑翔機的運動進行了分析。以上的研究對于滑翔機非線性模型均采用了線性化的方法,沒有考慮模型中的非線性特性和參數(shù)的不確定性。
近十幾年來,反演設計方法作為非線性反饋控制系統(tǒng)的一種遞歸設計方法,已經(jīng)成為不確定非線性系統(tǒng)控制的有效方法。反演技術是一種基于Lyapunov 穩(wěn)定性理論的非線性控制遞推設計方法,但尋找一個合適的Lyapunov 函數(shù)卻一直缺少系統(tǒng)化的方法,而反演設計方法則提供了一種有效的途徑,其基本思想是將復雜的非線性系統(tǒng)分解為不超過系統(tǒng)階數(shù)的子系統(tǒng),然后從系統(tǒng)輸出開始為每個子系統(tǒng)設計Lyapunov 函數(shù)和虛擬控制量,一直“反演”到系統(tǒng)的控制輸入,實現(xiàn)系統(tǒng)的全局漸近跟蹤。
本文針對水下滑翔機縱傾運動非線性模型參數(shù)不確定情況下,研究了滑翔機俯仰角跟蹤控制問題,控制律的設計分為兩步:第一步,采用了自適應積分反演控制方法,對于不確定模型參數(shù)進行在線估計,設計滑塊位移控制律;第二步,由于反演控制具有良好的過渡過程品質,將得到的滑塊位移作為滑塊伺服控制器的參考輸入,利用反演控制方法設計滑塊伺服控制器,跟蹤滑塊位移參考輸入。仿真研究顯示,該方法獲得了良好的系統(tǒng)動態(tài)性能,保證了俯仰角跟蹤誤差的全局漸近穩(wěn)定。
1 水下滑翔機縱傾運動模型
水下滑翔機的動力學模型[6]有著很強的非線性性,較為復雜,不便于控制系統(tǒng)的設計,為簡化問題的分析,作下面幾點假設[7]:
1)質量塊相對于滑翔機質量比較小,滑塊的縱向偏移量較小,且軸向位移及軸向移動速度較小,則由于滑塊移動引起的慣性主軸的變化ΔJ 可忽略不計,即滑翔機的轉動慣量=J2+ΔJ≈J2為常數(shù),并忽略滑塊軸向移動牽連力和科氏力的影響。
2)考慮到滑翔機速度的慢變特性,忽略速度的動態(tài)性能。
3)俯仰角θ∈(-π/2,π/2)
根據(jù)以上的假設,水下滑翔機的縱傾運動模型可以描述為
式中,ω2為俯仰角速度;J2為轉動慣量;mf1、mf3為附加質量;ms,s、r 分別為滑塊的質量和在載體坐標系下的位置(r 為固定值);α 為攻角;v1、v3為滑翔機在載體坐標系下的軸向和縱向速度;KM為水動力系數(shù);u 為滑塊的軸向控制力。
為便于分析,將模型(1)改寫為
模型(2)中包含不確定參數(shù)β,γ,δ.
2 自適應反演控制器設計
水下滑翔機縱傾運動控制律設計的基本思想是:首先根據(jù)給定俯仰角參考信號θr,利用自適應反演控制方法設計滑塊期望軸向位置sr,使得θ 能夠快速的全局漸近收斂到θr,進而以sr為參考輸入,設計控制律u,使得s 能夠快速的跟蹤sr.
2.1 俯仰角跟蹤控制器設計
第一步,定義俯仰角度跟蹤誤差
求導有

以角速度ω2為虛擬的控制輸入,使e1具有適當?shù)姆€(wěn)定特性,選擇穩(wěn)定函數(shù)

式中:c1,λ1為正的設計參數(shù);ζ1為積分項,定義為增加的積分項可以增強系統(tǒng)在干擾和模型參數(shù)不確定情況下的動態(tài)性能的魯棒性。
第二步,定義角速度的跟蹤誤差

由(4)式和(6)式得

選擇Lyapunov 函數(shù)

求導有

對(6)式求導有

將(2)式、(5)式代入(10)式有
選擇第二個Lyapunov 函數(shù)

求導有

將(9)式、(11)式代入(13)式有
為獲得期望的穩(wěn)定特性,考慮到不確定參數(shù)β,γ,δ,選擇滑塊位移參考輸入sr為
式中,當θ 為±90°時,ms(gcos θ+v1ω2)=0,在假設條件下為未知參數(shù)的估計值,為對應的估計誤差,c2,λ2為正的設計參數(shù),ζ2為積分項,定義為
將(15)式代入(14)式得
式中,
為消除參數(shù)估計對于系統(tǒng)穩(wěn)定性的影響,設計參數(shù)自適應律,選擇第三個Lyapunov 函數(shù)

式中,ε1,ε2,ε3為自適應參數(shù),對上式求導有
將(16)式代入(18)式有
選擇如下的自適應律
將(20)式代入(19)式得

由于標量函數(shù)V3正定,而負半定且對時間是一致連續(xù)的,根據(jù)Barbalat 引理有

由以上分析可知,(2)式描述的水下滑翔機縱傾運動在控制律(15)式及自適應律(20)式的作用下,能夠跟蹤指定的俯仰角參考信號,并且俯仰角跟蹤誤差全局漸近收斂到零。
2.2 滑塊伺服控制器設計
滑塊的軸向位移為s,滑塊在u 的作用下全局漸進跟蹤期望位移sr,由滑塊位移的作用可知,sr更應該視為一種靜態(tài)量,忽略其動態(tài)特性,結合(15)式運用反演法進行滑塊伺服控制器設計。
第一步,定義滑塊位移跟蹤誤差

求導有


定義滑塊軸向移動速度的跟蹤誤差

由(24)式和(25)式可知

選擇Lyapunov 函數(shù)

求導有

對(26)式求導有

選擇第二個Lyapunov 函數(shù)

求導有

取控制輸入

則有

根據(jù)Barbalat 引理有

由以上分析可知,(2)式描述的滑塊軸向運動在控制律(33)式作用下,能夠跟蹤滑塊位移參考信號,并且位移跟蹤誤差全局漸近收斂到零。
反演控制具有良好的過渡過程品質,滑塊在控制律(33)式的作用下,跟蹤參考輸入sr,并保證s=sr,而在控制律(15)式及自適應律(20)式的作用下,最終保證俯仰角跟蹤的全局漸近穩(wěn)定性。
3 仿真研究
通過仿真實驗驗證上述的自適應積分反演跟蹤控制器及滑塊伺服控制器的性能,并分析引入的積分項對于控制系統(tǒng)的性能的影響,控制器設計框圖如圖2所示。
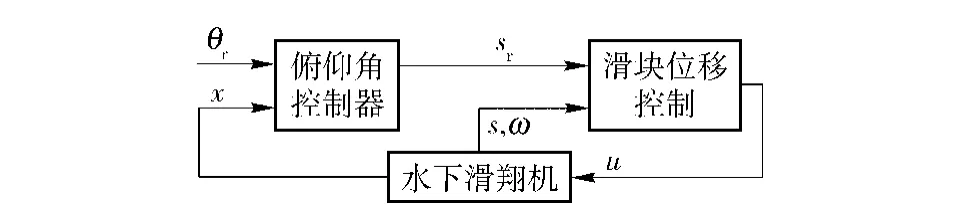
圖2 水下滑翔機縱傾運動控制示意圖Fig.2 Underwater glider vertical pitch motion control schematic
仿真中,取水下滑翔機運動模型參數(shù)KM=-100 Nm(s/m)2,J2=12 kg·m2,mf1=5 kg,mf3=70 kg,ms=9 kg,r=0.05 m,俯仰角參考指令取為
1)選取控制參數(shù)λ1=1,λ2=1,c1=2,c2=2,c3=15,c4=15,參數(shù)自適應估計的初值為,=-8,=5.4=-12,自適應參數(shù)ε1=ε2=ε3=0.1.
從仿真結果可以看出,俯仰角和滑塊位移能夠快速的跟蹤給定的參考值如圖3所示。同時,俯仰角及滑塊位移跟蹤誤差漸近收斂到零如圖4所示。
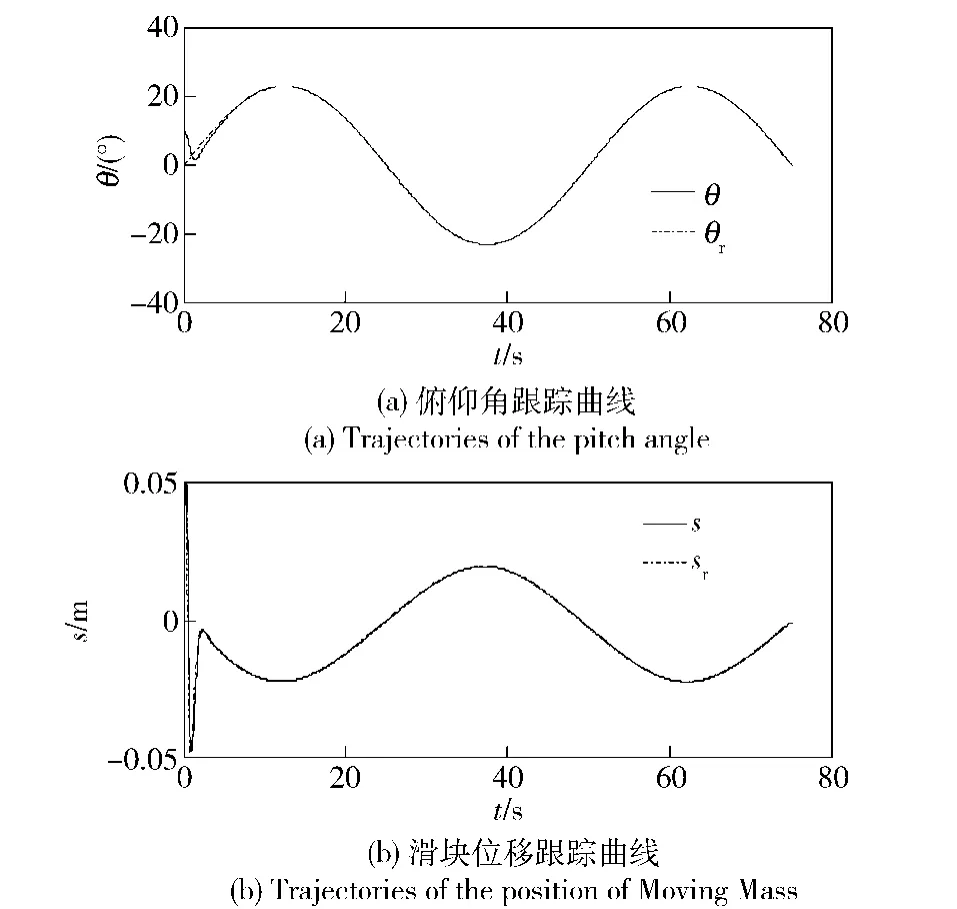
圖3 俯仰角、滑塊位移跟蹤曲線Fig.3 Trajectories of the pitch angle and position of Moving Mass
2)對比有積分項,即λ1=1,λ2=1 和無積分項,即λ1=0,λ2=0 時的控制系統(tǒng)的響應性能,其他控制參數(shù)與上述相同。
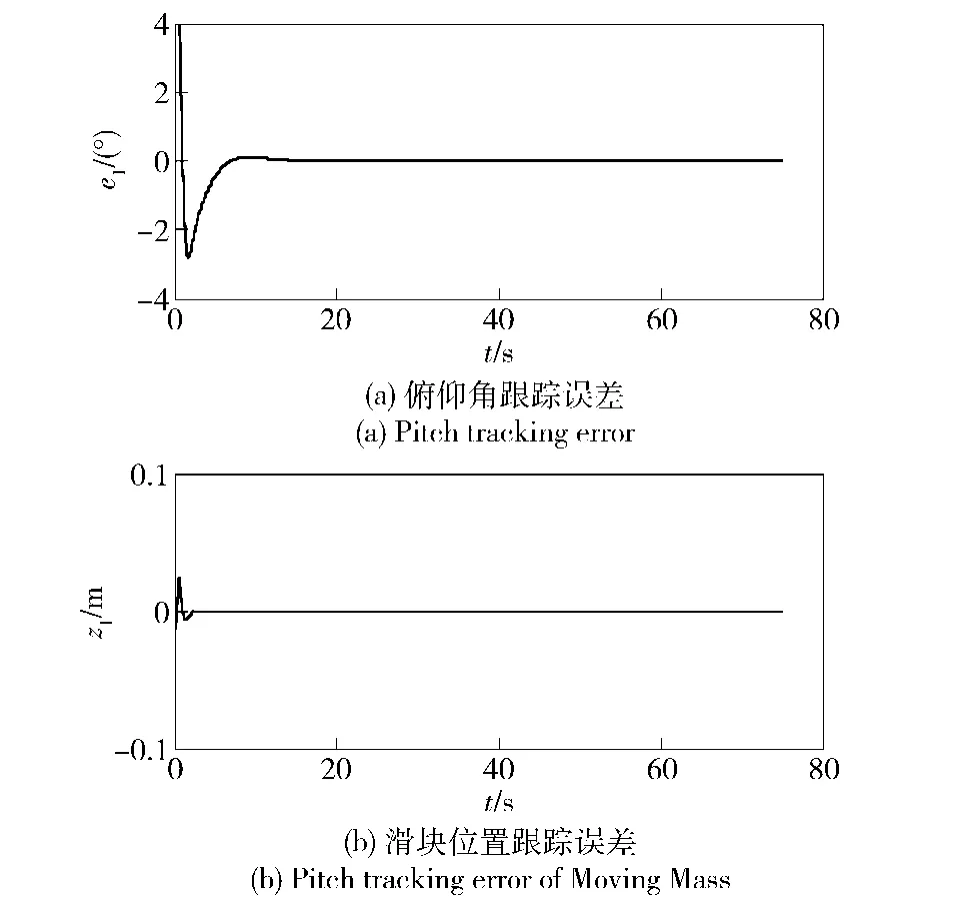
圖4 俯仰角及滑塊位置跟蹤誤差Fig.4 Pitch tracking error and position tracking error of Moving Mass
仿真結果如圖5所示,積分項的引入提高了俯仰角跟蹤精度,但增大了系統(tǒng)的超調。
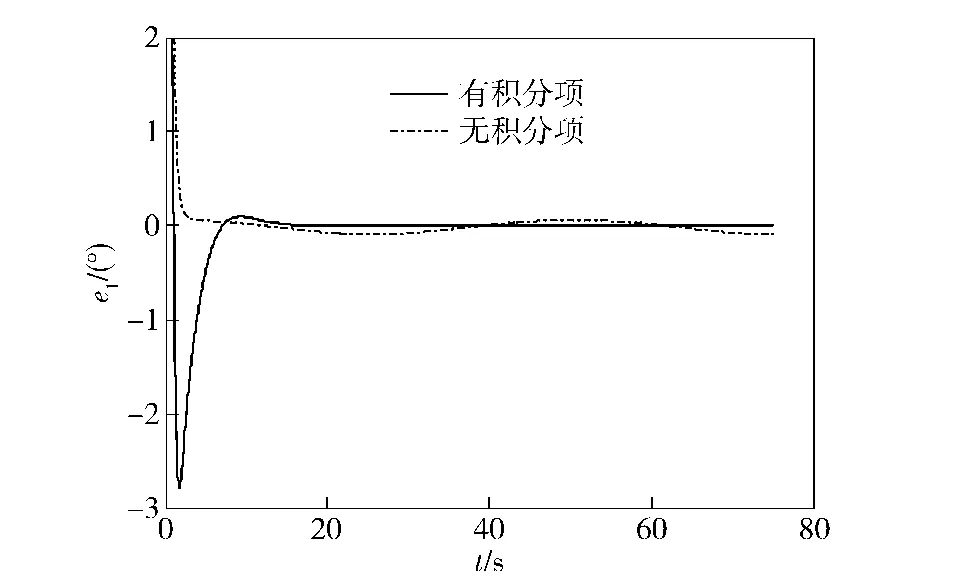
圖5 積分項對于系統(tǒng)性能的影響Fig.5 Integral on the performance of the system
上述仿真結果顯示,在俯仰角控制律和自適應律及滑塊伺服控制器的作用下,俯仰角和滑塊位移能夠快速的跟蹤給定的參考值。同時,俯仰角及滑塊位移跟蹤誤差收斂到零。自適應積分反演控制保證了在模型參數(shù)不確定的情況下跟蹤誤差的全局漸近穩(wěn)定性,積分項的引入,則進一步提高了系統(tǒng)在不確定參數(shù)及未建模動態(tài)下的魯棒性。
4 結論
本文研究了水下滑翔機縱傾運動的俯仰角跟蹤控制問題,采用自適應積分反演控制方法,設計了俯仰角跟蹤控制器及滑塊伺服控制器。理論分析和數(shù)學仿真都證明了在所設計的控制律和自適應律的作用下,閉環(huán)控制系統(tǒng)具有全局漸近穩(wěn)定性,而積分項的引入則可以進一步改善穩(wěn)態(tài)控制品質。水下滑翔機所處海洋環(huán)境復雜,如海流的影響等,在存在隨機干擾和模型參數(shù)不確定的情況下,自適應和滑模控制的結合將是一個值得探索的解決方案。另外,滑翔機的編隊控制,路徑跟蹤,路徑規(guī)劃等在未來的工作中也將做進一步的研究探討。
References)
[1] Jenkins S A,Humphreys D E,Sherman J,et al.Underwater glider system study[R]∥Scripps Institution of Oceano-graphy Technical Report.UC San Diego:Scripps Institution of Oceanography,2003.
[2] Naomi E L,Joshua G G.Model-based feedback control of autonomous underwater gliders[J].IEEE Journal of Oceanic Engineering,2001,26(4):643-645.
[3] Joshua G G.Underwater gliders:dynamics,control and design[D].Princeton:Princeton University,2005.
[4] Nina M,Craig W.Under water glider motion control[C].Proceedings of the 47th IEEE Conferenceon Decision and Control,2008:552-557.
[5] Smallwood D A,Whitcomb L L.Model based dynamic positioning of underwater robotic vehicles:theory and experiment[J].IEEE Journal of Oceanic Engineering,2004,29(1):1-19.
[6] Woolsey C A,Leonard N E.Moving mass control for underwater vehicles[C]∥Proceedings of the American Control Conference,May 8-10,2002.
[7] Liao G B,Yu B S,Yang Y G.Study on the theory and simplified equations of mass moment control missile[J].System Engineering and Electronics,Nov,2004,26(11):1635-1639.
[8] Jean-Jacques E.Slotine,Weiping Li.Applied nonlinear control[M].Beijing:China Machine Press,2006.
[9] 嚴衛(wèi)生.魚雷航行力學[M].西安:西北工業(yè)大學出版社,2005.YAN Wei-sheng.Torpedo navigation mechanics[M].Xi’an:Northwestern Polytechnical University Press,2005.(in Chinese)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03