ZPW-2000 軌道電路信息傳輸仿真設計
2011-03-13 01:23:16熊平,劉奇
電氣化鐵道 2011年3期
關鍵詞:信息
熊 平,劉 奇
0 引言
目前,國內鐵路正處于高速發展時期,對鐵路設備的安全性、效率等要求也越來越高,特別是列車控制(下文簡稱列控)系統,為了保證鐵路運輸的安全高效及舒適,近年來運輸設備正不斷更新換代以適應新的需求。
列控系統通過地面子系統向車載子系統傳輸信息,并由列控中心根據信息產生命令控制列車安全運行。所以,車-地之間的信息傳輸對鐵路運輸作業的安全及效率至關重要。CTCS-2 級列控系統采用ZPW-2000 軌道電路作為列車占用、出清的檢查和地面控車信息的傳輸設備。因此通過計算機仿真技術對CTCS-2 級列控系統ZPW-2000 軌道電路信息傳輸過程進行仿真模擬,其研究成果有助于鐵路研究及設計部門對信息傳輸技術的開發,也可用于現場培訓。
1 ZPW-2000 軌道電路碼序分析
列車在區間運行時,ZPW-2000 軌道電路碼序根據前方閉塞分區的數量會不斷變化。主要有區間無車占用、1 輛車占用、2 輛車占用及多輛車占用等情況,下面列舉前3 種情況進行分析。
(1)當區段無車占用時,站內區段信息碼均為“H”,以下行線為例,區間的碼序固定為HU-ULU-L-L2-L3-L4-L5。
(2)當區段有列車運行,且列車A 前方沒有其他列車B 時,列車所在區段碼序為當前軌道電路碼序,并表示出空閑數量,把信息傳遞給車載設備。
(3)當區段有列車運行,且列車A 前方有列車B 運行時,即2 列列車在區間追蹤運行,碼序將進行調整。
在第3 種情況下,又存在3 種狀態:列車A、列車B 均只占用一個閉塞分區,列車A 的當前碼序為L,表示前方有3 個閉塞區段空閑;列車A 占用2 個閉塞分區,列車B 占用一個閉塞分區時,此時,列車A 占用的第2 個閉塞分區碼序為“H”,第1 個閉塞分區碼序為“LU”,表示前方有2 個閉塞區段空閑;列車A 與B 均占用2 個閉塞分區時,如圖1 所示,此時,列車B 占用的第2 個閉塞分區碼序為“H”,列車A 第一個閉塞分區碼序為“LU”,表示前方有2 個閉塞區段空閑。
將后2 個狀態的軌道電路碼序進行對照,可以發現:雖然列車B 占用的第2 個閉塞分區碼序改變,但并沒有改變列車A 與B 之間的間隔距離,即列車A 當前碼序依然不變。該情況和列車A 與B 之間無車占用的閉塞區段實際空閑數量相符合。分析可知,無論前后2 輛列車占用閉塞分區是1 個還是2 個,追蹤列車的當前碼序可由前方列車尾部所在區段,或前方列車已出清區段開始推算(其中前方列車尾部所在區段可假定義為H,或直接利用前方列車已出清區段為恒定值HU 這一結論)。其好處在于:不用考慮上述3 種狀態會對追蹤列車當前碼序造成的影響(但站間閉塞分區碼序則有變化)。
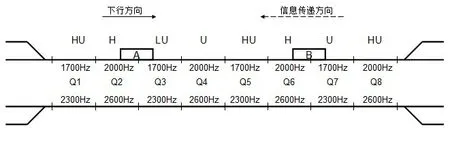
圖1 軌道電路碼序在第3 種情況之狀態3 的示意圖
站間閉塞分區碼序調整模式。從進站口開始倒推每個區段的碼序,一直推至列車占用的區段,此時開始分2 種情況繼續倒推:情況A,列車占用一個閉塞分區時,碼序推至該分區后,從剛出清區段以HU 為開頭重新倒推;情況B,列車占用2 個閉塞分區時,碼序推至第1 個閉塞分區后,從第2 個閉塞分區開始以H 為開頭重新倒推。站間閉塞分區碼序推算過程,如圖2 所示。
當車載設備接收到列車當前碼序之后,可以通過列車當前碼序,并結合應答器信息包中的軌道閉塞分區長度、速度等信息計算出目標距離,然后生成目標距離曲線。因此,列車當前碼序是該過程所需的主要信息數據。
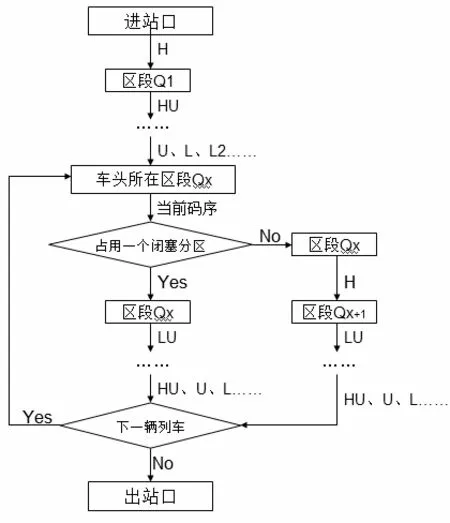
圖2 站間閉塞分區碼序推算過程示意圖
2 ZPW-2000 軌道電路信息傳輸仿真系統
ZPW-2000 軌道電路信息傳輸仿真系統分單車運行模式和雙車追蹤模式2 種。這2 種模式均要設置初始參數,啟動列車運行,根據列車運行狀態產生列車當前碼序與前方空閑閉塞分區數量,把實時信息傳輸給車載設備。
2.1 單車運行模式
單輛列車當前碼序推算直接來自列車圖標在運行示意圖中走行距離(以圖表.left 數值為參量),當參量在某2 個數值(該數值為8 個閉塞分區的不同坐標)之間,即可反映出當前距離進站口前方空閑閉塞分區數量。在仿真系統中初始速度有60,120,240 km/h 3 種,分別演示慢車、正常車速、快車情況。時間控件(timer)是實現動態化演示的關鍵。初始設置Timer(n).Enabled = False,時間控件不會執行。在啟動控件的click()參數中設置Timer(n).Enabled = True,使控件在啟動時開始執行。在列車停車控件的 click()參數中加入Timer(n).Enabled = False 可以通過取消執行時間控件使得列車停車。
其中,情況1 為正常勻速運行,情況2 為減速運行,情況3 為停車。仿真分析前必須在初始加載命令中設置timer 控件的響應頻率。單車運行模式界面從左到右分為Q1、Q2…Q8 區段,列車運行之前選擇列車初始位置和初始速度,啟動列車,列車在運行過程中,按照前方閉塞分區數量的變化,列車運行的當前顯示碼序也會實時變化,如閉塞分區數量為4 時,列車當前碼序為L2。
2.2 雙車追蹤模式
在雙車追蹤模式中,將會有追蹤列車A、前行列車B 按照所設定的不同速度、不同初始位置在同一條線路上運行。追蹤列車A 為產生列車當前碼序的列車,為該模式下的研究對象。前行列車B作為前行列車,必須時刻保證在追蹤列車A 的前方。當B 車中途停車,則暫停B 車運行,而A 車按照原速前行,并在接近B 車出清的前方區段減速停車。下面分2 種情況討論。
(1)追蹤列車A 追上前行列車B 之后的減速與停車。當追蹤列車A 快追上前方前行列車B 時,此時速度按照單車模式所設置方式遞減到十分緩慢。前行列車B 可能會在站間或者進站之后停車,追蹤列車A 與前行列車B 之間必須保持間隔距離。間隔距離一般為前行列車B 尾部所在閉塞分區到下一閉塞分區的距離。設前行列車B 圖標.left 參量為W,第一閉塞分區Q1 橫向坐標數值為W1,閉塞分區長度為S1,則(W-W1)/S1取整得到的值N為前行列車B 已完全經過的閉塞分區數量。N×S1+W1-Q(注:Q 為追蹤列車A 車長),則得到前行列車B 停車時追蹤列車A 圖標.left 的最終定位—參量T。當追蹤列車A 圖標.left 根據timer 控件位移至T 時,圖標不再位移,即為追蹤列車A 按照規定合理停車。
(2)追蹤列車A 前方空閑閉塞分區數量。空閑閉塞分區為2 車均無部分占用的區段。之前已經計算出前行列車B 完全經過的閉塞分區數量N=(W-W1)/S1。按照同樣方法計算追蹤列車A完全經過的閉塞分區數量M=(W2-W1)/S1(W2為追蹤列車A 圖標.left 參量),此時需考慮A 車長(原因是因為需要知道A 列車頭所占用分區數量),若車長小于閉塞區段,則在M 的基礎上加1,若車長大于閉塞分區,則在M 的基礎上加大于閉塞分區的倍數再加1。最終空閑閉塞分區數量X為M1-N。如圖3 所示。

圖3 列車A 前方空閑分區數量編程算法示意圖
在設計過程中,列車A、B 啟動運行使用同一控件,停車按鈕則分別設置,其意圖在于模擬B車站間停車時,A 車的不同當前碼序。A 車初始區段為進站口到Q3,而B 車初始區段為Q4 到Q7,其意圖在于使B 車始終位于A 車前方,符合追蹤條件。最終雙車追蹤模式編程界面與單車運行模式界面類似,前行列車和追蹤列車都要選擇列車初始位置和初始速度,在列車運行過程中,根據前行列車和追蹤列車之間閉塞分區的數量,追蹤列車的顯示碼序也實時發生變化。
3 結束語
ZPW-2000 軌道電路是地面設備向車載設備傳輸數據的重要通道,在列車運行控制系統中起著關鍵作用,本文對CTCS-2 列控系統ZPW-2000 軌道電路信息傳輸方式進行仿真設計初期探索,開展了對軌道電路碼序其推算算法的分析以及利用地址碼信息實現邏輯運算的分析,利用Microsoft visual basic 6.0 對其進行了軟件仿真,仿真系統還有待進一步深入開發,以便能在現場運用。
[1] 鐵道部.中國列車運行控制系統CTCS 技術規范總則(暫行).2003.
[2] 鐵道部.客運專線CTCS-2 級列控系統配置及運用技術原則(暫行).2007.124 號.
[3] 吳石生.CTCS-2 級列控系統地面設備的仿真與研究[C].西南交通大學,2008.
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創業(2009年10期)2009-10-08 04:52:00
數字社區&智能家居(2009年7期)2009-09-29 08:16:48
數字社區&智能家居(2009年11期)2009-06-25 04:30:34
數字社區&智能家居(2009年3期)2009-04-21 03:09:04
數字社區&智能家居(2009年2期)2009-03-27 04:33:44
數字社區&智能家居(2009年12期)2009-02-03 07:50:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32