地鐵盾構控制測量方法探討
2011-03-28 12:43:26龐紅軍衛(wèi)建東黃威然
隧道建設(中英文) 2011年3期
關鍵詞:測量
龐紅軍,衛(wèi)建東,黃威然
(1.中鐵隧道股份有限公司,鄭州 450003;2.解放軍信息工程大學測繪學院,鄭州 450052; 3.廣州地鐵設計研究院,廣州 510010)
0 引言
近10年來國內(nèi)有20余個城市先后進行地鐵建設,地鐵區(qū)間隧道多采用盾構法施工。盾構法施工測量貫通精度要求很高,規(guī)范要求橫向誤差限差100 mm,縱向誤差限差50 mm,洞門鋼環(huán)最大允許盾構機貫通偏差160 mm(洞門鋼環(huán)直徑6 600 mm,盾構刀盤6 280 mm)。隨著地鐵在中心城區(qū)的逐步完善,越來越多的郊區(qū)延長線開工建設,就可能使盾構區(qū)間很長,很多條地鐵線同時在一個車站交匯,使地鐵車站形式變得復雜多樣,車站深度的加深又使聯(lián)系測量難度增加,由于工期要求,會采用一個端頭井或始發(fā)井進行盾構始發(fā),這就加大了貫通難度。因此,采用傳統(tǒng)的地鐵盾構控制測量方法很難滿足新形式下地鐵發(fā)展的需要,需要采取一些新方法或綜合方法來適應今后長盾構隧道區(qū)間、車站復雜多樣的地鐵發(fā)展模式。盾構施工控制的研究很多:呂國嶺等[1]對目前國內(nèi)各種盾構測量的方法做了研究;聶愛梅[2]更多地從設計的角度對地鐵控制測量檢測技術方法做了論述;鄒勇[3]對傳統(tǒng)的地鐵長隧道控制測量方法做了討論;肖書安[4]主要對國外隧道工程施工測量技術的現(xiàn)狀和發(fā)展做了闡述;丁樺[5]介紹了武水高速公路隧道的控制測量方法;王科鋒[6]對長大隧道洞內(nèi)控制測量方法進行了敘述。但是對目前的地鐵盾構控制測量方法尤其是對今后發(fā)展的長盾構隧道間區(qū)、車站復雜多樣的盾構施工控制測量方法還沒有系統(tǒng)的、有創(chuàng)新的探討。本文結合各種施工現(xiàn)場從采用強制對中觀測墩、主副導線點、基線控制、整體平差、全自動陀螺經(jīng)緯儀等方面對盾構區(qū)間控制網(wǎng)的布設應用提出了獨特的見解,基本上能夠滿足今后地鐵盾構施工的發(fā)展需要。
1 區(qū)間控制測量
1.1 2測站通視
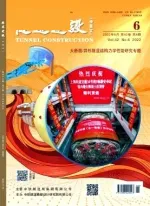
在平行于2車站左右線區(qū)間地面建造物上,布設區(qū)間控制網(wǎng),如圖1所示。A和B2測站通視,如2測站點在建造物上,則采用強制對中觀測墩,可以避免對中誤差;如2測點位于道路其他位置,則必須按照精密導線網(wǎng)的要求進行布點。A和B 2點作為基線進行平面控制坐標的控制。AB基線必須同車站平面控制進行同精度聯(lián)測并整體平差,且基線兩端點各有至少2條附合導線進行觀測。
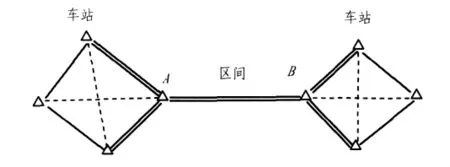
圖1 2測站通視下區(qū)間控制網(wǎng)形式Fig.1 Control net mode of tunnel section when two survey stations are inter-visible
1.2 2測站不通視
A和B 2測站點布設方式與通視布設方法一樣。當A和B 2測站點不通視,則需要進行左右兩側的導線傳達,左右兩側測點盡量能相互通視,增加多余測量條件,如圖2所示,虛線部分為盡量能夠通視。A,B,C,D,E,F(xiàn)等測點盡量采用強制對中觀測墩。同樣,區(qū)間各測點必須同車站平面控制網(wǎng)進行同精度聯(lián)測并整體平差,且基線兩端點各有至少2條附合導線進行觀測。
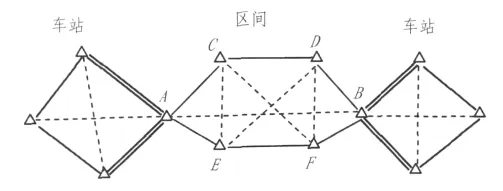
圖2 2測站不通視下區(qū)間控制網(wǎng)形式Fig.2 Control net mode of tunnel section when two survey stations are disinter-visible
為了突出在車站上布設控制網(wǎng),區(qū)間隧道的控制網(wǎng)如圖2和圖3所示(如全畫上圖形太亂,重點不突出,為了突出重點,進行了簡化并非只是一個結點)。
1.3 2區(qū)間隧道過長(大于3 km)且2測站不通視
A和B2測站點布設方式與通視布設方法一樣,且導線傳遞方法同圖1和圖2,不同的是,各個測點增加1個副測點,如圖3所示。如果主測點C采用強制對中觀測墩,在其旁邊2~3 m處再布設1個同精密導線要求的測站副點C′,主測點進行主三角鎖的傳遞,副測點進行副三角鎖的傳遞,2控制網(wǎng)分別同車站平面控制同精度聯(lián)測并整體平差,主副控制網(wǎng)再進行加權平差。
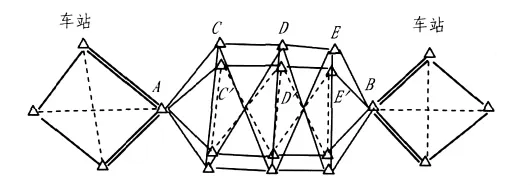
圖3 2測站不通視長區(qū)間控制網(wǎng)形式Fig.3 Control net mode of long tunnel section when two survey stations are disinter-visible
2 車站控制測量
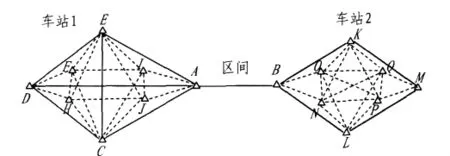
圖4 標準車站控制網(wǎng)形式Fig.4 Control net mode of standard Metro station
車站控制測量所有的點都是必須同區(qū)間控制網(wǎng)同精度整體平差的,車站控制測量是為聯(lián)系測量及地面區(qū)間控制測量做基礎的,車站控制測量的精度直接影響聯(lián)系測量、洞內(nèi)隧道控制及盾構出洞的精度,因此,車站控制網(wǎng)的布設及優(yōu)化就顯得非常重要。
目前國內(nèi)地鐵車站主要有標準模式(車站長約200 m,寬約20 m)、換乘模式(十字型、加深型——一般為3層)、始發(fā)井模式(長約80 m,寬約20 m——盾構機全長63 m)。
2.1 標準車站模式
車站平面控制網(wǎng)的一個基本原則是盡量有一條線同區(qū)間基線平行或同線,因此,每個車站的平面控制網(wǎng)基本上在高處布設3個點并與一基線點組成控制網(wǎng)。在車站兩端頭左右線各布設一強制對中觀測墩,4個觀測墩相互通視,如圖4所示。A和B為基線測點,C,D,E為車站1高處控制點,F(xiàn),I,H,J為車站1地面平面強制對中觀測墩;K,L,M為車站2高處控制點,O,Q,P,N為車站2地面平面強制對中觀測墩。各測站點盡量能夠相互通視。
2.2 換乘車站模式
換乘車站一般為橫向交叉或縱向平行,橫向交叉模式其縱向方向一般為200~400 m,縱向平行模式其縱向方向一般為長200 m,深30 m左右。上海人民廣場地鐵站目前有1號線、2號線、8號線換乘,共18個出入口,在空間上成“米”字型交叉,是換乘車站的混合模式。本文主要研究盾構區(qū)間測量問題,因此車站測量也是從區(qū)間盾構測量的角度考慮的。在長度較長的車站,中間部位(近地鐵頂板預留洞口附近)左右線各增加1個強制對中的觀測墩,如圖5所示,左右線上6個點相互通視,此時其車站控制網(wǎng)更為復雜,其他同標準車站模式。
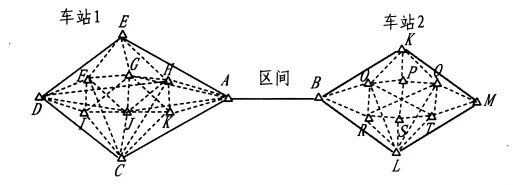
圖5 換乘車站控制網(wǎng)形式Fig.5 Control net mode of transfer Metro station
2.3 始發(fā)井車站模式
采用始發(fā)井模式一般是工期需要,盾構在始發(fā)井直接始發(fā),看條件成熟情況采用整機始發(fā)或延長管線始發(fā)。因此始發(fā)井的長度都不大,一般只有80 m左右。除始發(fā)井地面采用左右線各2個強制對中觀測墩外,高處控制測點需加密,具體視各車站通視情況,本文采用增加1個測點的情況進行分析,如圖6所示。
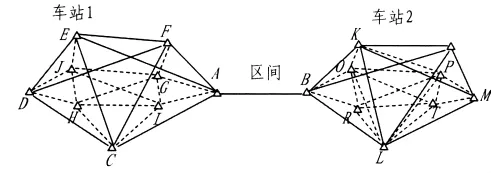
圖6 始發(fā)井車站控制網(wǎng)形式Fig.6 Control net mode of launching shaft station
3 聯(lián)系定向測量
GB 50308—2008《城市軌道交通工程測量規(guī)范》[7]中聯(lián)系定向測量提到有5種方法:1)聯(lián)系三角形法(一井定向);2)陀螺儀、經(jīng)緯儀、鉛垂儀(鋼絲)組合法;3)兩井定向;4)導線直接傳遞法;5)投點定向法。現(xiàn)實中聯(lián)系測量用的最多的有2種方法:一是精密導線直接傳遞法,二是二井定向。一般來說,只要條件允許,例如有多個井口,井上井下傳遞點垂直角不大于30°,采用導線直接傳遞法;如果受條件限制,沒有直接傳遞導線的條件或垂直角大于30°,采用兩井定向進行聯(lián)系測量。
3.1 精密導線直接傳遞法
精密導線傳遞的一個基本要求:相鄰導線點間以及導線點與其相連的衛(wèi)星定位點之間的垂直角不應大于30°,視線離障礙物的距離不應小于1.5 m。
采用精密導線直接傳遞,由于距離短,高差大,一般角度在20°左右,所以地面車站的控制點與傳遞到車站底板的平面控制點均采用強制對中觀測墩,其中地面控制點觀測墩盡量降低高度,相反,車站底板的觀測墩盡量提高高度(一般不超過1.5 m)。精密導線傳遞控制網(wǎng)如圖7所示,F(xiàn),H,I,K為地面強制對中觀測墩,O,N,P,M是車站底板上的強制對中觀測墩平面控制點。地面觀測車站底板上的測點必須通過端頭井對向觀測,以增加觀測距離,或通過中層板預留洞口直接測量車站底板測點。車站底板左右2條線作為控制盾構區(qū)間控制的2條基線,因此,車站底板2基線上的4個點必須同地面車站區(qū)間所有的點進行整體平差,以提高其精度。
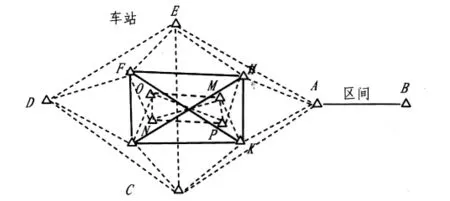
圖7 精密導線傳遞控制網(wǎng)形式Fig.7 Control net mode transferred by precise wire
3.2 二井定向
地鐵盾構區(qū)間不建議使用一井定向方法進行聯(lián)系測量,因為一井定向的精度很難滿足要求,對測量人員熟練程度、儀器精度、操作過程、平差分析都有很高的要求,如角度測量測6測回,每次測3組數(shù)據(jù),測角中誤差不大于2″,地下起始邊方位角角差不大于20″,聯(lián)系測量最后引起的橫向貫通中誤差為±36 mm,明顯誤差較大。如果受現(xiàn)場條件限制,必須采用一井定向的方法,應采用較高精度的測量儀器(如TCA2003、TS30等),多次測量和全自動陀螺經(jīng)緯儀測定真北方向法來提高精度。
二井定向方法即端頭井左右線各進行1次一井定向,傳遞至底板4個測點,等盾構機進入隧道內(nèi)約200 m,再進行1次二井定向。如果此時端頭井深度較大(大于30 m),就要增加相應的二井定向聯(lián)系測量,或使用陀螺經(jīng)緯儀進行定向。常用的全自動陀螺經(jīng)緯儀為GYROMAT2000,其定位精度高于±3.2″,但是由于GYROMAT2000價格昂貴(100多萬),國內(nèi)用于地鐵工程的很少。如果盾構區(qū)間特別長或盾構車站特別深,如多個換乘車站交匯點或國家戰(zhàn)備需要深井車站、盾構區(qū)間,此時在盾構始發(fā)端和盾構機到達前200 m使用GYROMAT2000陀螺經(jīng)緯儀就顯得非常必要。
4 盾構區(qū)間控制測量
由于條件的限制,盾構區(qū)間隧道平面控制網(wǎng)的布設只能布設成導線,因此,要求布設的導線測回數(shù)和儀器等級高于精密導線的要求。隧道導線應盡量沿線路中線布設,邊長要接近等邊,避免長短邊相接,盡量布設成多邊形閉合導線或主副導線環(huán)。由于后期沉降等因素,每1/4區(qū)間隧道長應該從車站底板控制點開始重測隧道內(nèi)控制網(wǎng)。如導線邊長較短,在曲線段,測回間儀器和目標應重新對中,以提高精度。每次測量完成,都要同車站底板控制點進行整體平差,各次測量成果再進行加權平差;如區(qū)間隧道過長或聯(lián)系測量條件不是很好,則需要在隧道1/2和3/4處,盾構出洞前200 m、盾構出洞前50 m,采用GYROMAT2000全自動陀螺經(jīng)緯儀進行定位精度,陀螺經(jīng)緯儀是能夠實現(xiàn)自動尋找真北方向從而測定地面和地下任意測站的大地方向角,不受時間和環(huán)境條件限制,且方向角真北方向定位誤差不累積,可以中間進行檢查、修正測量成果,因此對盾構機到站貫通測量顯得尤其重要。
5 盾構機出洞控制測量
洞門鋼環(huán)最大允許盾構機貫通偏差160 mm,測量規(guī)范要求:橫向誤差限差100mm,縱向50mm。除了測量誤差,還有施工誤差,凈空要求,所以真正留給測量的限差很少,留給控制測量的限差就更少了。盾構機出洞前的控制測量是整個控制測量中最重要的一環(huán),需要對地面區(qū)間、車站、聯(lián)系測量點、盾構始發(fā)基點、盾構接收基點全部重新測量并進行整體平差,且需要對隧道區(qū)間內(nèi)導線重新測量,必要時全自動陀螺經(jīng)緯儀進行定向,確保盾構機順利出洞。
6 高程控制測量
高程控制測量相對來說簡單,使用傳統(tǒng)的加測微器的水準儀+銦瓦鋼尺就可以滿足。但需要注意3點:1)聯(lián)系測量使用懸吊鋼尺法多次懸吊并加尺長改正,盡量使用主體樓梯傳遞高程進行復核;2)如遇大江大河區(qū)間,可以采用三角高程進行傳遞,傳統(tǒng)水準測量復核;3)隧道區(qū)間內(nèi)高程控制測量,每200m復測1次。
7 結論與討論
根據(jù)不同的車站模式、不同的隧道區(qū)間模式對地鐵盾構控制測量方法進行探討,通過采用強制對中觀測墩、主副導線點、基線控制、整體平差等方法,尤其是上述方法的綜合應用,最終使直接導線傳遞的聯(lián)系測量法滿足了聯(lián)系測量的要求,基本上滿足了目前國內(nèi)盾構施工控制測量的要求且在很多城市的地鐵盾構施工中得到了很好的應用。但是地鐵可能會向超深的地鐵站(超過40 m)、更長的盾構區(qū)間(超過10 km)的方向發(fā)展,直接導線傳遞的聯(lián)系測量法就會有更多的局限性,二井定向加全自動陀螺經(jīng)緯儀進行定位方法尤其重要,需要進一步的研究探討,以滿足今后的地鐵盾構施工發(fā)展需要。
[1] 呂國嶺,黃威然,龐紅軍.盾構自動導向方法的應用研究[J].隧道建設,2005,25(5):11-14.(LV Guoling,HUANG Weiran,PANG Hongjun.Research on application of automatic guidance system in shield tunnelling[J].Tunnel Construction,2005,25(5):11-14.(in Chinese))
[2] 聶愛梅.地鐵控制測量檢測主要技術方法[J].工程與建設,2008(1):45-47.
[3] 鄒勇.簡析地鐵長隧道控制測量[J].隧道建設,2006,26 (2):27-29.(ZOU Yong.Analysis on control survey of long metro tunnels[J].Tunnel Construction,2006,26(2):27-29.(in Chinese))
[4] 肖書安.國外隧道施工測量技術的現(xiàn)狀和發(fā)展[J].隧道建設,2007,27(1):76-79,86.(XIAO Shu’an.Present situation and development of aboard tunnel construction surveying technology[J].2007,27(1):76-79,86.(in Chinese))
[5] 丁樺.淺談特長隧道的控制測量[J].鄂州大學學報,2010 (5):17-19.
[6] 王科鋒,黃國濤.長大隧道洞內(nèi)控制測量實施方案設計[J].能源技術與管理,2008(5):78-80.(WANG Kefeng,HUANG Guotao.Design of inner long-big tunnel control survey[J].Energy Technology and Management,2008(5):78-80.(in Chinese))
[7] GB 50308—2008 城市軌道交通工程測量規(guī)范[S].北京:中國建筑工業(yè)出版社,2008.
猜你喜歡
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21