兆瓦級風機直流和交流電動變槳距技術
2011-04-12 08:18:24汪海波
電力工程技術 2011年4期
關鍵詞:交流
汪海波,田 煒,魯 斌,劉 劍
(國網電力科學研究院,江蘇南京210003)
由于全球范圍內煤炭、石油等化石能源日漸減少,以及以煤炭為主要能源的電力行業帶來的環境污染問題,世界各國都將目光轉移到了可再生、清潔能源的研究、開發和利用上。風力發電是近年來發展最快、具備大規模開發利用的綠色能源之一[1,2]。目前風力發電機組正朝著大型化、變槳距和變速恒頻的方向不斷發展,變速恒頻MW級風電機組已經成為國際風力發電市場的主流產品。
變槳距機構是變速恒頻風電機組的核心部件之一。變槳距是指借助控制技術和動力系統,改變安裝在大型風力發電機輪轂上的葉片的槳距角大小,從而改變葉片的氣動特性,使槳葉和整機的受力狀況大為改善,在緊急情況下還可以實現氣動剎車的功能。國外大型風力發電機組尤其是MW級以上的風電機組一般采用電動變槳距控制技術。我國風力發電事業正處于快速發展階段,MW級風電機組的電動變槳距控制系統尚處于試驗、改進階段。結合國內外MW級風力發電機組的發展現狀,對MW級風電機組的電動變槳距系統進行簡要分析。
1 變槳距系統概述
1.1 風機的2種變槳距機構
根據變槳執行機構的動力形式不同,大型MW級風電機組變槳距系統的驅動方式主要有液壓和電動2種方式[3]。液壓執行機構具有轉矩大、無需變速機構且技術成熟等優點,Vestas,Gamesa等公司的風力發電機采用了液壓變槳距技術[4]。但液壓傳動結構復雜,存在泄漏、滲油的隱患,且液壓油受溫度影響大,影響液壓的剛度、液壓阻尼比等。近年來,隨著電力電子技術、電機設計和控制理論等的發展,電動執行機構以適應能力強、響應快、精度高、結構簡單、無泄漏、無污染和維護方便等優點得到了廣泛的應用,GE Wind,Enercon,Repower,Nordex 等公司的風力發電機都是采用了電動變槳技術[4]。
1.2 風機變槳的工作原理
變槳距調節型風力發電機組是指通過變槳驅動裝置,帶動安裝在輪轂上的葉片轉動,改變葉片槳距角的大小,從而改變風力發電機組獲得的空氣動力轉矩。其工作過程為:當風電機組達到運行條件時,控制系統命令變槳系統將葉片槳距角調到一定的角度,當風輪轉速達到一定時,再將葉片槳距角調節到0°附近,直到風力機達到額定轉速并網發電;在運行過程中,當風速低于額定風速時,發電機輸出功率小于額定功率,槳距角保持位置不變,不作任何調節;當風速超過額定風速時,發電機輸出功率超過額定功率,系統根據輸出功率的變化調整葉片槳距角的大小,使發電機的輸出功率保持在額定功率,保證風力發電機安全、穩定的工作。
2 電動變槳距系統
目前,大型風電機組普遍采用具有獨立變槳驅動系統的三槳葉結構[5]。電動變槳距系統由3套獨立的變槳裝置組成,變槳系統如圖1所示,圖1中只給出一個槳葉的變槳執行機構,其他2個槳葉與此相同。變槳系統由控制器、伺服電機、伺服電機驅動器、后備電源、制動電阻、減速機構、電機編碼器、葉片角度編碼器以及限位開關等部分組成。其中后備電源可以采用鉛酸蓄電池串聯或超級電容串并聯來實現。當變槳系統收到來自主控變槳命令時,伺服電動機帶動減速機構的輸出軸小齒輪旋轉,小齒輪與槳葉回轉支承的內環相嚙合,從而帶動回轉支承的內環與葉片一起旋轉,實現了改變葉片槳距角的目的。根據電機編碼器與葉片角度編碼器的角度反饋值實現槳距角的閉環控制,從而完成3個槳葉的定位和同步控制。
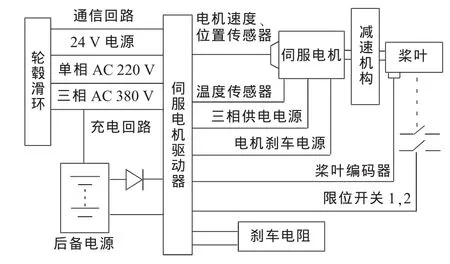
圖1 電動變槳系統
目前應用于風電機組的電動變槳距系統方案主要有直流伺服電機驅動與交流伺服電機驅動2種方案。采用直流電機方案時,圖1所示的伺服電機驅動器與伺服電機分別為直流伺服驅動器和直流伺服電機;采用交流電機方案時,伺服電機驅動器與伺服電機分別為交流伺服驅動器和交流伺服電機。
2.1 直流電動變槳
電動變槳距系統采用直流伺服電機方案時,采用的直流伺服電機主要有串激直流電機與永磁直流電機2種。
串激直流電機的勵磁繞組與定子電樞繞組之間通過電刷和換向器相串聯,勵磁電流與電樞電流相同,它的原理如圖2所示。
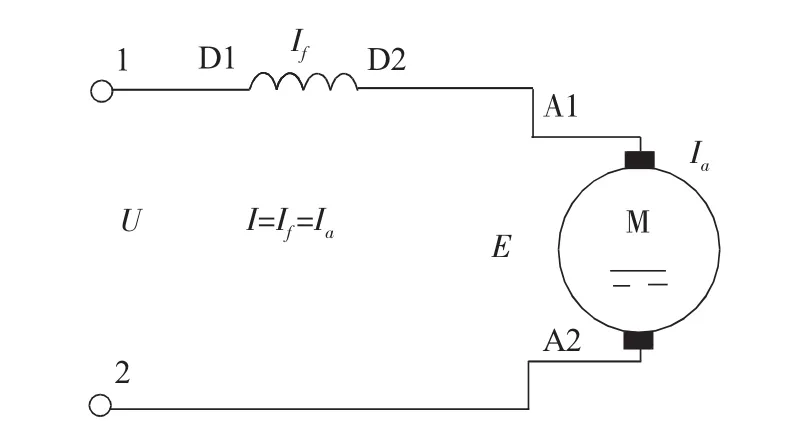
圖2 串激直流電機原理圖
其數學模型如下:

式中:K1,K2為系數;T為輸出扭矩;n為速度。 由式(1)可得:
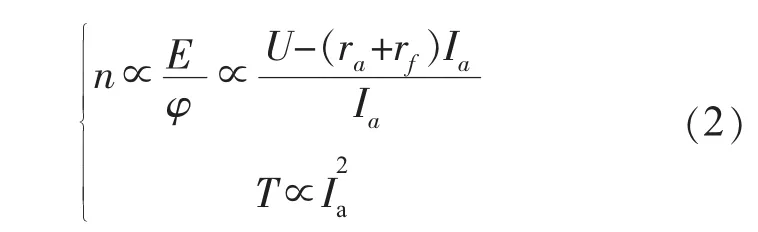
由式(1,2)可以看出串激電機定子的磁通量隨著勵磁電流的增大而增大,轉矩近似與電樞電流的平方成正比,在電壓不變的情況下,轉速隨轉矩或電流的增加而迅速下降。串激直流電機適合應用在大轉矩應用場合,但是電機的轉速變化率大,速度得不到精確的控制[6]。采用直流串激電機方案的電動變槳系統得到了較為一定的應用,其中SSB,MOOG2大公司的電動變槳產品中都有此種方案。
由于電樞和勵磁回路串聯,2個繞組中電流方向相同,不能用改變電流方向的方法來進行電機制動或反向運行。電機的正向制動或改變電機運行方向,電樞繞組或串勵繞組的極性必須反向。可以通過在串勵繞組中使用整流橋,改變電樞與勵磁繞組的電流方向,來實現電機機械的四象限運行。增加整流裝置后的原理如圖3所示,通過電樞繞組或串勵繞組的極性反向改變電機運行方向的原理如下:當電源輸入為上正下負時,電樞、勵磁電流流向分別為IA1-A2,ID1-D2;當電源輸入變為上負下正時,電樞、勵磁電流流向分別為IA2-A1,ID1-D2,其中電源端子1,2接直流伺服驅動器的輸出。

圖3 串激直流電機原理圖
永磁直流電機由永磁體代替電勵磁,無換向器和電刷,其數學模型簡單。永磁直流電機的電壓與速度關系曲線線性度好,電流與轉矩成線性關系。永磁直流電機的正反向運行只需改變電樞繞組施加電壓的極性。由于定子磁場是恒定的,所以這類電機對電壓變化的響應非常快。
直流電機的工作電壓等級相對較低,在電動變槳距系統采用直流電機的方案中,在出現進線主電源掉電和直流伺服驅動器故障的情況下,可以通過后備電源的接入實現順槳,并通過觸發限位開關實現電源的切斷。但是直流電機存在結構復雜、體積重量大、維護難的問題。
2.2 交流電動變槳
隨著電力電子技術、微處理器、電機控制技術的迅速發展,以交流伺服電機為執行電動機的交流伺服系統具有可與直流伺服系統相媲美的性能,并能夠充分發揮交流電動機的優勢,現代伺服系統驅動控制也逐漸朝著交流伺服電機驅動控制的方向發展。電動變槳距系統采用交流伺服電機方案時,采用的交流伺服電機主要有感應異步電機與永磁同步電機(PMSM)2種。
感應異步電動機制造容易,價格低廉,不需要特殊維護。但電機運行時轉子發熱比較嚴重,同時轉子電阻隨溫度而變化將影響磁場定向的準確性。PMSM采用永磁體代替普通同步電機的勵磁繞組,從而省去了勵磁線圈、滑環及電刷。PMSM的定子結構與普通的感應電機相同,由三相繞組及鐵芯構成。與感應電動機相比,PMSM不需要勵磁電流,可以顯著提高功率因數,而且在穩定運行時沒有轉子電阻損耗[6]。以二極式PMSM為例,PMSM的等效結構坐標圖如圖4所示。

圖4 永磁同步電機等效結構圖
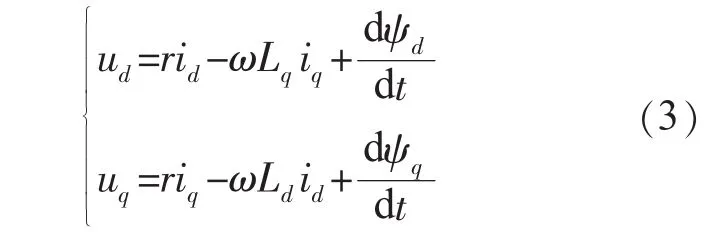
在交流電機的矢量控制中,建立在d-q坐標系下的PMSM數學模型[7],其電壓方程:
磁鏈方程:

對于表面式永磁同步電機,Ld=Lq=L,所以PMSM轉矩方程:

機械運動方程:

以上各式中的 ud,uq,id,iq分別為 d-q 軸的電壓和電流;Ld,Lq分別為 d-q軸電感;r為定子電阻;P為電機的極對數;ψf為永磁體與定子交鏈的磁鏈;Te為電磁轉矩;TL為負載轉矩;J為轉動慣量;ω為轉子電角速度。由式(5)可見,在PMSM矢量控制中,只要能很好地控制定子電流的勵磁電流分量id,保持d軸磁鏈ψd幅值恒定,則轉矩只受定子電流的轉矩電流分量iq控制,電機的電磁轉矩與轉矩電流分量iq成正比。通過這樣的矢量控制,PMSM就能獲得與直流電動機調壓調速近似的性能。
常用的交流電機工作電壓相對較高,在后備電源的選擇上比采用直流電機方案難度大,可以采用特殊設計的低壓大電流交流伺服電機。相比直流伺服電機,交流伺服電機具有體積小、重量輕、結構簡單、大轉矩輸出等優點。
2.3 2種方案比較
(1)和直流伺服電機相比,交流伺服電機具有體積小、重量輕、結構簡單、功率密度大、維護方便等優點。隨著風力發電機單機容量的持續增大,對電動變槳距系統的容量提出了更高的要求,采用交流電機具有一定的優勢。(2)和交流伺服系統相比,在伺服電機驅動器出現故障時,直流伺服電機的電樞兩端接入后備電源后可以完成順槳動作,保證風力發電機3個槳葉的有效順槳。交流伺服驅動器一旦出現故障,與之相連的交流電機不能通過接入后備電源的方式完成對槳葉的順槳工作。所以伺服驅動器故障的情況下,采用直流電機的方案有一定的優勢,但是3套伺服驅動器同時壞掉的機率較小,應從整體上統一考慮。(3)直流伺服電機的數學模型簡單,其電樞電壓與速度、轉矩與電流的線性度較好,運動控制相對簡單,目前直流伺服驅動器電路較多的采用H橋式拓撲。交流伺服電機內部電磁關系復雜,但是通過現代電機控制理論來驅動交流伺服電機,能夠實現比直流伺服系統性能更佳的交流伺服系統。交流伺服驅動器的電路須采用三相全橋的拓撲結構。
綜上所述,交流伺服系統在具有直流伺服系統眾多優點的基礎上,還在價格成本、運行穩定性、可維護性等諸多方面具有相當的優勢。隨著全球風電技術的迅猛發展,風力發電機單機容量的持續增大,風電機組對電動變槳距系統的容量、可靠性等方面提出了更高的要求。相比直流伺服系統,電動變槳距系統采用交流伺服系統作為其執行機構具有較大的優勢。
3 結束語
電動變槳系統具有造價低廉、適用性廣、結構簡單和便于維護的優點,為絕大多數風機制造商所廣泛采用,電動變槳技術已經成為風力發電機變槳技術的主流。隨著風力發電機組單機容量的不斷增大,電動變槳距系統采用交流伺服電機的方案將是一種趨勢。
[1]李 晶,方 勇,宋家驊,等.中外常用風力發電技術及風電機概述 [J].電氣技術,2009(8):79-82.
[2]沙 非,馬成康,劉 闖,等.變速恒頻風力發電系統及其控制技術研究 [J].電網與清潔能源,2009,25(1):44-47.
[3]任麗蓉.兆瓦級風力發電機組電動變槳距系統研究[D].重慶:重慶大學,2009.
[4]劉曉林.淺談風力發電機組的液壓和電動變槳系統[J].電氣應用,2009,28(15):70-73.
[5]惠 晶,顧 鑫,楊元侃.兆瓦級風力發電機組電動變槳距系統 [J].電機與控制應用,2007,34(11):51-54.
[6]姜飛龍.永磁同步電機伺服系統控制研究[D].杭州:浙江大學,2006.
[7]黃佳佳.滑模控制永磁同步電機伺服系統的研究[D].南京:南京航空航天大學,2007.
猜你喜歡
科教新報(2022年12期)2022-05-23 06:34:16
四川勞動保障(2021年10期)2021-12-02 01:41:42
今日農業(2021年14期)2021-10-14 08:35:28
四川勞動保障(2021年4期)2021-07-22 08:08:54
四川勞動保障(2021年5期)2021-07-19 06:09:54
四川勞動保障(2021年3期)2021-06-09 07:09:22
四川勞動保障(2021年9期)2021-01-27 20:24:59
海峽姐妹(2020年8期)2020-08-25 09:30:18
遵義(2018年14期)2018-08-06 06:32:18
人民中國(日文版)(2015年10期)2015-04-16 03:53:58
