選煤廠點檢系統網關節點設計
2011-04-23 12:11:24王振堯朱中波中國礦業大學信息與電氣工程學院江蘇徐州221008
長江大學學報(自科版) 2011年10期
王振堯,朱中波 (中國礦業大學信息與電氣工程學院,江蘇徐州221 008)
劉衛東 中國礦業大學信息與電氣工程學院,江蘇徐州221008 兗州煤業股份有限公司興隆莊煤礦,山東兗州272102
選煤廠的條件惡劣,聲音嘈雜,各個傳送皮帶電機分布復雜。如果采用人為定期檢測的方法來獲得電機的振動信號,得到的數據沒有實時性,而且工作難度非常大。若通過采用無線傳感器網絡,把振動傳感器采集的數據通過無線的方式發送到以太網接入點,再將數據的格式轉換成符合以太網的數據包格式上傳到有線控制網絡,供上位機作相應的處理,這便形成了一個完整的監控系統[1]。煤礦產業在進行數據共享以及數據傳輸時采用工業以太網,而無線傳感器網絡的信息采集以及收發數據是基于無線短程網的主流協議IEEE802.15.4來進行的[2]。在選煤廠的建筑中,無線傳感器的節點多,傳輸的數據量(振動數據)很大,再加上多點傳輸的影響,必然會使無線接入點的工作量很大,如何最大限度的提高無線接入點的性能,能最大化的反應整個選煤廠的客觀環境成為關鍵問題。為此,筆者對選煤廠點檢系統網關節點進行設計。
1 網絡拓撲設計
在選煤廠的無線傳感器網絡中,節點部署在被感知的電機外殼上,上述節點通過自組織方式構成無線網絡,以協作的方式采集和處理網絡覆蓋區域中的電機振動信號,實現對電機振動情況實時的采集、處理和分析。無線傳感器網絡結構包括分布式傳感器節點、Sink節點、交換機、地面環網、調度指揮中心和用戶界面 (見圖1),其中各個車間的傳感器節點采用星形的無線網絡拓撲結構,振動傳感器采用 ADXL202進行振動信號的采集,無線收發模塊采用CC1100進行數據收發,通過51單片機把采集的信號數據提供給收發模塊,然后通過多跳的方式把數據通過路由節點把數據傳輸給Sink節點,完成無線采集的部分。
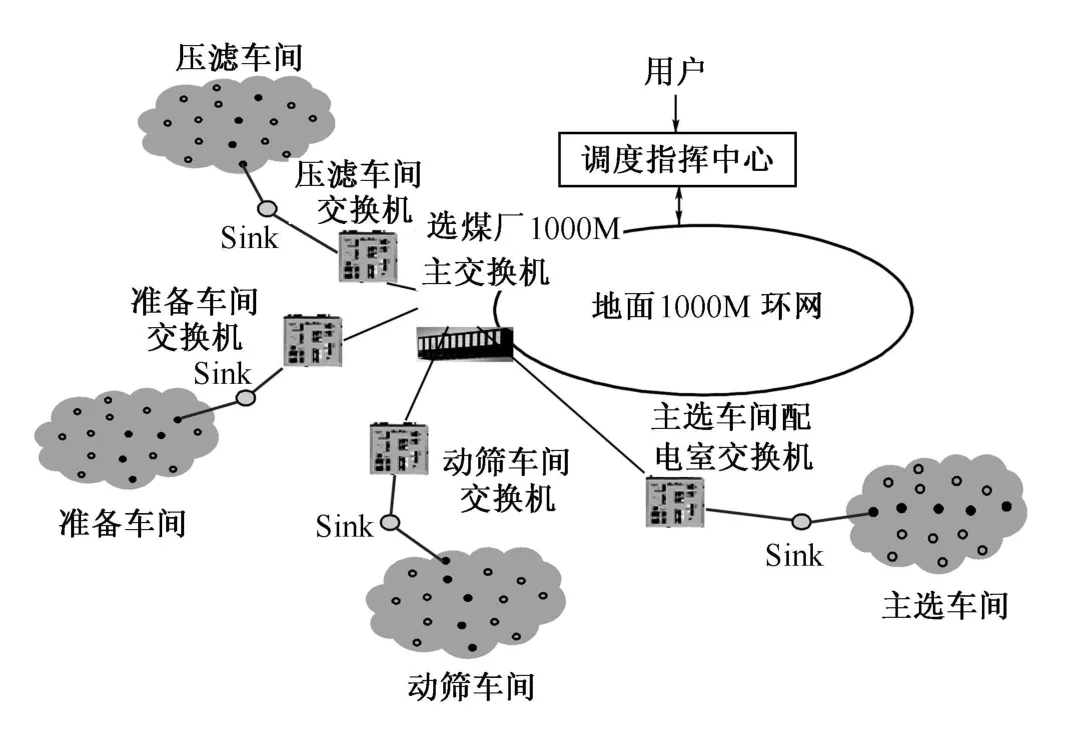
圖1 監控系統
2 網關節點設計
2.1 硬件設計
網關是建立在傳輸層以上的協議轉換器,通常連接2個或多個相互獨立的網絡。考慮到節點的通信能力有限 (數據速率僅為250kbps),為了減少網關協議轉換自身的工作量,該網關選擇了一款集成Ethernet接口的ARM芯片來完成硬件系統的搭建[3]。
網關硬件結構如圖2所示,其由內部集成以太網MAC的ARM7處理器 W90N745CDG、射頻收發模塊CC1101、以太網收發芯片 (PHY)RTL8201、大容量DataFlash存儲卡片S29AL016D70TF102等模塊組成。
W90N745CDG作為硬件系統的主控芯片,片內集成Flash、USB、CAN、以太網MAC等接口的高性能ARM7 SOC[4]。
收發芯片CC1100是一款低成本單片UHF收發器,功耗低,體積小,使用簡單,操作靈活。CC1100最高工作速率達500kbps,支持2-FSK,GFSK和MSK調制方式[5-6]。CC1100的內部結構框圖如圖3所示。
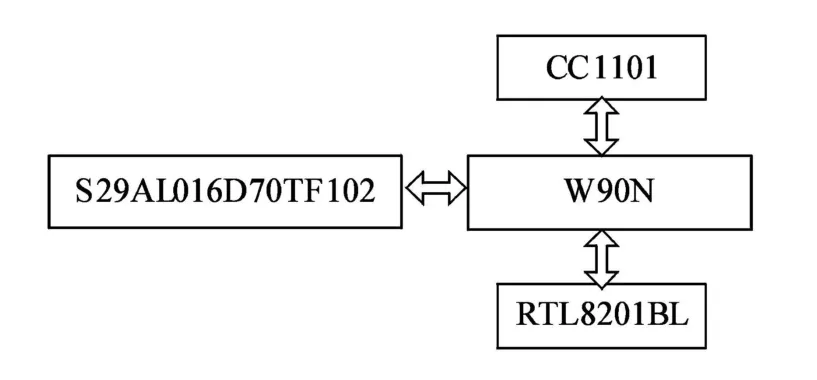
圖2 網關硬件結構
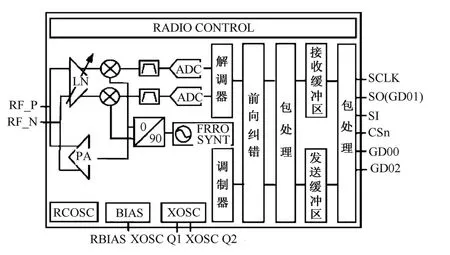
圖3 CC1100內部結構
以太網PHY層芯片采用的是RT L8201BL。RT L8201BL是一個單端口的物理層收發器,可實現10/100M以太網物理層的全部功能。
S29AL016D70TF102是一款16Mb、只支持3.0V的閃存,包含2097152bytes或者1048576words。
在TCP/IP協議中,以太網的數據傳輸使用硬件地址 (MAC)來進行識別,其中ARP(地址解析協議)完成IP地址和數據鏈路層使用的硬件地址之間的轉換,因而為了保證網關在以太網中的通信,首先要實現ARP協議的功能。協議轉換的工作原理如圖4所示。以太網向無線節點信息轉換方式過程如下:①信息輸入端從網絡接口接收一個正常發往接入點的IP數據包,簡單判斷后向上發給對應的 UDP或TCP處理函數進行相應處理,然后向上發給網關應用程序處理。②網關應用程序經過簡單分析后,確定要轉發給傳感器網絡中的哪個節點,通過ARP解析出該節點的MAC地址,再將相應數據包成功交至該節點。③節點向Ethernet端轉換。
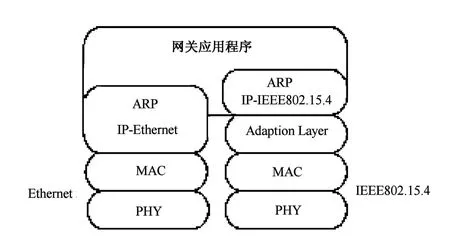
圖4 協議轉換工作原理圖
2.2 軟件設計
Linux操作系統應用于多種硬件平臺,具有良好的移植性、高可靠性、完備的文件系統以及豐富的API等特點,為嵌入式網關提供強大的軟件支持[7]。因此,選擇Linux作為嵌入式網關的操作系統。
選煤廠監控系統采用CC1101收發模塊來做Sink節點,接受各個路由節點傳送來的振動信號數據。網關采用ARM單片機進行協議轉換,將感應器、檢測器、計算機等工業設備的RS-232串口信號與以太網絡信號相互轉換。Sink節點與網關組成了一個接入點,接入點的輸入端是無限的收發模塊,輸出端是一個以太網RJ-45接口。這便是一個串口轉以太網口的協議轉換工具,該設備可以直接通過以太網接口與計算機直接相連,或者通過交換機連接到地面環網再與計算機通信。網關節點主程序流程圖如圖5所示。
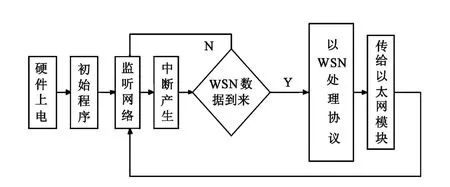
圖5 網關節點主程序流程圖
3 測試結果分析
使用Matlab產生一段音樂再外接硬件喇叭,把振動傳感器附著在喇叭上,然后對通過傳感器采集到的數據進行分析。由于振動傳感器采集到的是振動信號分解到X軸和Y軸的數據,所以求X軸和Y軸的數據平方根就可以還原原始振動的信號。上位機軟件接收到的信息界面如圖6所示。圖6顯示了接收一個節點的數據,該數據中包含振動的X軸與Y軸數據。取X軸與Y軸數據的平方根,這個平方根就是振動的幅值。把這個幅值在 Matlab中仿真就可以得到傳感器采集到的音樂的時域波形和頻域波形 (見圖7)。從圖7(b)可以看出,音樂信號的主頻率出現在500~700Hz之間,這說明網關采集到的振動信號是正確的。

圖6 信息接收界面
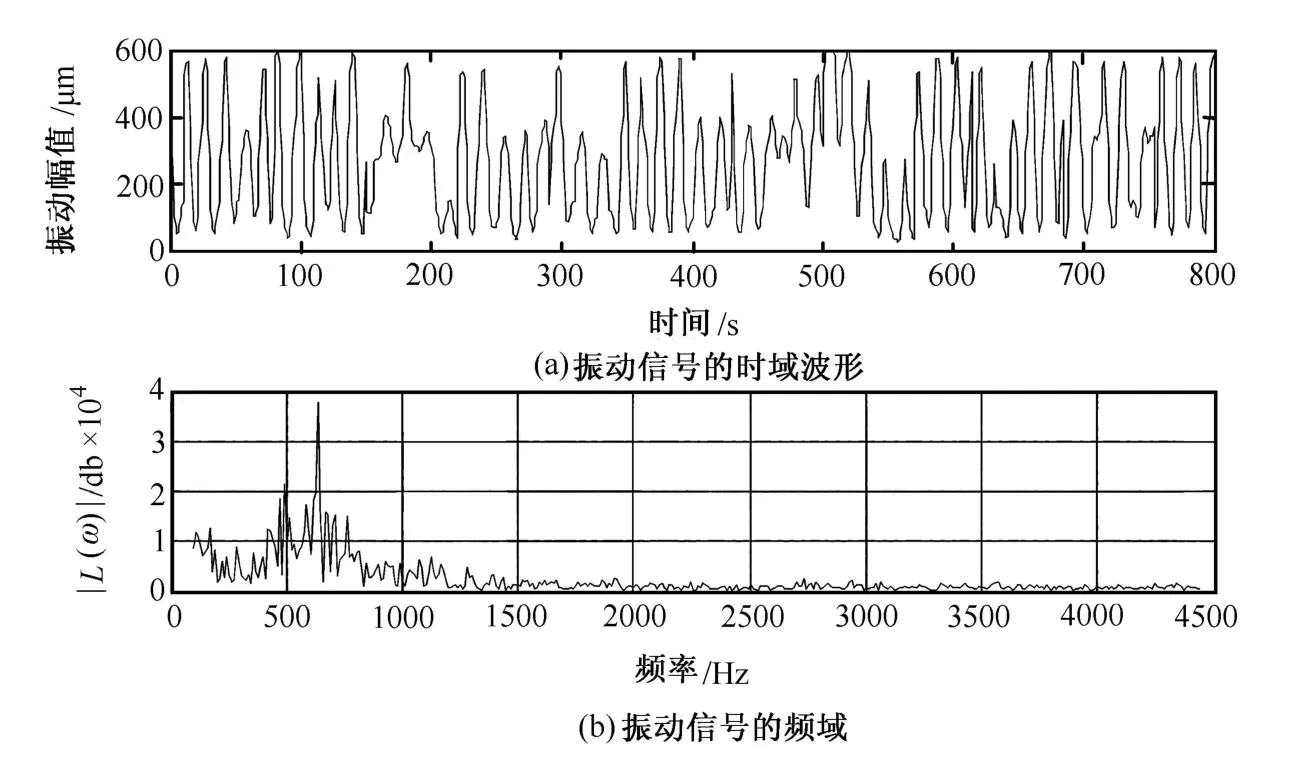
圖7 振動信號的Matlab仿真
4 結 語
對選煤廠點檢系統網關節點進行設計,該網關節點可以同時接收4個路由節點發送的數據,這為選煤廠的節點放置提供了比較充分的空間。測試結果表明,該網關具有效率高、響應實時、可靠性高、功耗低和抗干擾能力強等特點,且在 “無線傳感器網絡在煤礦選煤廠中的應用”項目中得以使用,因而該設計具有可行性。
[1]孫利民,李建中.無線傳感器網絡 [M].北京:清華大學出版社,2005.
[2]王文君,胡國珍.工業以太網及其無線接入技術的研究[J].工業控制計算,2008,21(1):23-24.
[3]崔光照,陳富強.基于ARM9的無線傳感器網絡網關節點設計 [J].計算機技術與應用,2008(11):115-118.
[4]牛永超,馬孝義.基于CC1100的溫室溫濕度檢測系統 [J].農機化研究,2009(8):91-92.
[5]鄧專,陳維,王春麟.射頻收發芯片CC1100及其應用 [J].機械工程與自動化,2007,145(6):168-168.
[6]吳常明,蘇小龍.基于A RM9嵌入式網關的設計 [J].大眾科技,2010(7):13-14.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國生殖健康(2019年3期)2019-02-01 06:12:26
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00