高速攝像結合虛擬儀器測量振動及其AVD方法研究*
2011-04-26 05:08:58宋玉珍劉新程
艦船電子工程 2011年1期
劉 煉 宋玉珍 劉新程
(91550部隊91分隊1) 大連 116023)(91913部隊30分隊2) 旅順 116041)
1 引言
任何一個力學系統(tǒng)在工作時都有可能發(fā)生振動,尤其是武器發(fā)射瞬間對整個發(fā)射系統(tǒng)造成的振動。通過獲得發(fā)射裝置在發(fā)射過程中的振動特征參數(shù)及相關物理量隨時間的變化規(guī)律,為檢驗和改進武備系統(tǒng)的設計、為全武器系統(tǒng)的最后定型提供必要的依據(jù)。而當前所使用的測量和分析方法主要是力學測量與分析方法,這種方法測量系統(tǒng)龐大,數(shù)據(jù)分析效率低下,甚至有時會損壞傳感器。所以,提出一種基于虛擬儀器的高效、高精度的測量與分析方法,在物理通道的基礎上增加若干虛擬通道,即對信號擴展一次積分通道、二次積分通道、一次微分通道和二次微分通道。定義虛擬通道之后,就可以實現(xiàn)在采樣時,不僅記錄了物理通道中的各路數(shù)據(jù),同時還得到虛擬通道中定義的信號,采樣結束后就同時保存了原始信號和虛擬通道信號,相比采集后處理的方式,極大地提高了效率。結合虛擬儀器和全程微積分技術,使加速度(A)、速度(V)和位移(D)三個基本參量(本文簡稱AVD值)三測量的實現(xiàn)成為可能。過去某一個傳感器只能獲得其中一個信號,需要采樣后處理才能獲得ACD值,若對該路擴展適當?shù)奈⒎趾头e分虛擬通道,就可以額外獲得AVD三測量功能:即只使用一個傳感器,只占用一路采集通道,還可以同時獲得加速度(A)、速度(V)和位移(D)三路信號。這種測量方法具有廣闊前景和深遠意義。
2 系統(tǒng)組成
計算機振動測量分析系統(tǒng)[1]主要由待測物體部分、光學成像部分、數(shù)據(jù)傳輸部分、虛擬儀器、分析部分和結果輸出部分構成。其具體結構如圖1所示。

圖1 高速攝像系統(tǒng)結構框圖
3 硬件構成
3.1 攝像系統(tǒng)
攝像系統(tǒng)[2]包括變焦距鏡頭、CCD攝像機(包括CCD芯片、驅(qū)動電路和信息處理電路等)、尋像器和固定裝置。
選用美國EG&G公司的RA25678N芯片作為圖像傳感器。RA25678N是一種MOS高速固體圖像傳感器陣列,也稱為“自掃描光電二極管陣列”,簡稱SSPD,SSPD除具有CCD的特點外,還具有抗彌散性好、暗電流小、實際感光面積大等優(yōu)點,并避免了CCD在電荷轉移過程中產(chǎn)生的不良影響。
其主要技術指標為:
1)畫幅頻率:500幀/s
2)像元數(shù):256×256
3)像元中心距:40μ m
4)像元感光面積:800μ m2
5)動態(tài)范圍:300:1
6)感光靈敏度:5.768V/μ j/cm
7)平均暗電流:2%
8)等效時鐘頻率:40MHz
9)有效感光面積:10.24mm×10.24mm
這種芯片在水平方向每32個像元分成一組,整個芯片共分成八組,由八個輸出端口同時分別輸出,其中四個輸出端口輸出偶數(shù)序列像元信號,另四個輸出端口輸出奇數(shù)序列像元信號。
CCD攝像管是電荷耦合器件,在硅片上集成了以陣列分布的成像單元及相應的控制電路、輸出電路。當有一束平行光照射到鏡頭上時,所有的成像單元處于導通狀態(tài),輸出的圖象為全亮平面(圖2(a));當有一個U形物體擋在鏡頭前方時,由于部分光線被擋住,導致部分成像單元處于截止狀態(tài)。所以輸出圖象就會形成一個U形的陰影(圖2(b))。當物體振動時。在任何時刻物體的形態(tài)都被以這種方式記錄下來了。光電三極管分布越密,分辨率就越高。
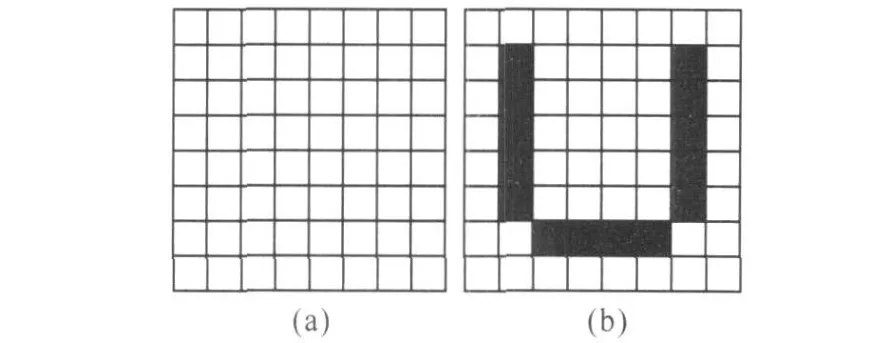
圖2 CCD攝像頭成像原理
3.2 主機
主機包括計算機、大容量圖像存儲器、監(jiān)視器、鍵盤和其它接口與控制單元。
系統(tǒng)的存儲容量至少為2000幀全幅圖像數(shù)據(jù),每幀圖像數(shù)據(jù)按64Kbit×8計,即 512Kbit,數(shù)據(jù)總量達1Gbit,如此大的存儲量需要大容量的存儲設備。
4 軟件構成
4.1 預處理過程
4.1.1 動態(tài)分塊濾波算法
由于從攝像機傳送過來的數(shù)據(jù)是物體及其周圍環(huán)境的真實反映[3],所以存在著各種外在的干擾。即使在實驗中盡量改善測量環(huán)境,如讓與待分析振動無關的物體(如支撐物等)不要進入圖像,增加光線照射的強度,來減少物體自身投影的影響。但是有用信號中混有的干擾信號總是無法完全消除的。因此,在對原始圖像進行識別處理之前,必須將上述的干擾因素排除,也就是要先對原始采樣信號進行濾波。由于干擾信號的存在具有隨機性,所以本系統(tǒng)設計了“動態(tài)分區(qū)濾波”的方法來進行處理。該方法的具體算法如下:第一步,將整個圖像區(qū)用十字形劃分為四塊 B1、B2、B3和B4,如圖 3所示。
然后通過下面的公式求出每塊的平均灰度值H1、H2、H3和 H4。其中 H 的上標(0)代表第零次分區(qū),以下上標意義與此相同。
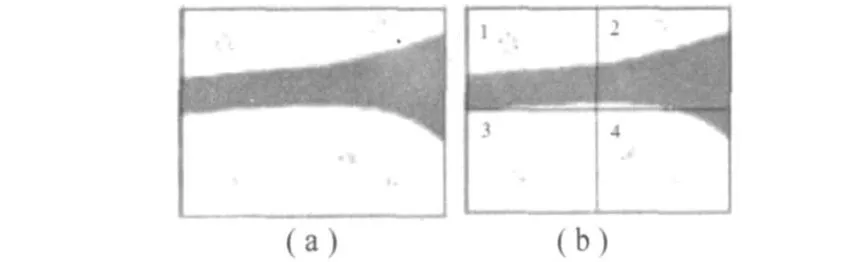
圖3 動態(tài)分區(qū)濾波第一步

再將每一個分塊按上述方法分成四等份B11、B12、B13和B14,這樣就把噪音信號進行“分而濾之”的處理,如圖4所示。
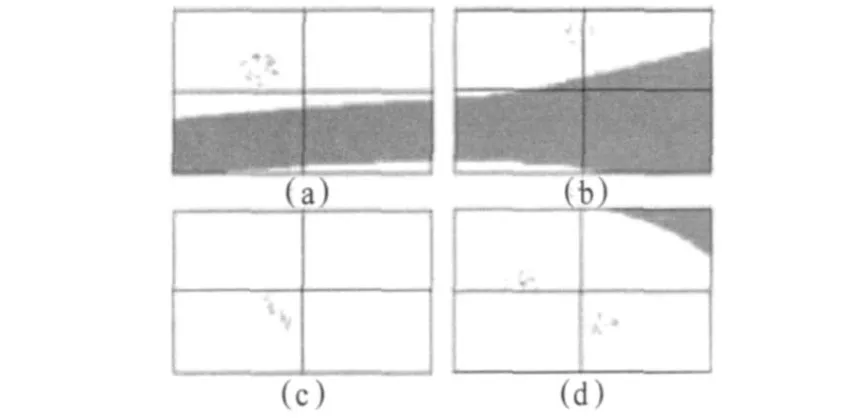
圖4 動態(tài)分區(qū)濾波第二步
然后將這四個灰度值和母分區(qū)灰度值H1作比較,定義如下控制量:

可以重復以上的步驟,直到控制量δ小于某一指定值,可以認為在此時的每一小塊中所出現(xiàn)的灰度值奇異點為干擾信號。這樣,就能用當前的塊灰度平均值代替塊中的各點灰度值。從而也就到達了濾去噪音信號的目的。
4.1.2 二值化算法
濾波以后,就可以對圖像進行二值化處理了。二值化算法[4]的核心在于如何獲得一個良好的灰度閾值,使得圖像的二值化處理能達到最佳效果。如果該閾值選得過亮,那么圖像就會在物體本身之外產(chǎn)生許多黑斑,達不到分辨的目的;如果該閾值選得過暗,又會使待測物體的外形變小,導致數(shù)據(jù)失真。為了對圖像進行更好的提取,必須選擇一個較好的閾值自動選擇算法。在計算機顯示器上,每個像素的顏色有R,G,B三部分構成,當R=G=B=255時,該點為白色,也就是對應為亮點;當R=G=B=0時該點為黑色,也就是對應為暗點。由于圖像是黑白的,所以對于同一點,其R,G,B的值大致相同,首先將屏幕上每個像素的R值讀到一個二維矩陣R[i][j]中,如果實驗背景選定為白色,而且已經(jīng)對圖像進行了濾波處理,因此得到的圖像點的R值的分布應該是在振動物體的位置上有個突起的峰(谷),而其他位置上變化應該很平滑。所以通過對這i×j個值求平均值得到Ravi作為原始閾值是具有分辨能力的。通過實驗,在此閾值控制下,圖像的二值化效果一般能夠滿足要求。為了進行彌補,系統(tǒng)另外設置了人工控制的模式。也就是在閾值附近通過手動控件進行調(diào)整,并隨時監(jiān)控圖像處理的結果,直到滿意為止。
4.1.3 圖像線化處理算法
該算法的主要目的就是從圖像中提取到可以進行后處理的數(shù)據(jù)[5]。首先按列找到二值化處理后圖像的陰影上、下邊沿,按著兩個邊沿數(shù)據(jù)求一個平均值Yavi[i]。將這些值看成是一維振動結構的中心線,在忽略物體材料的微小不均勻性的情況下,該曲線的形態(tài)就能認為是物體的振動形態(tài)。如圖5所示。
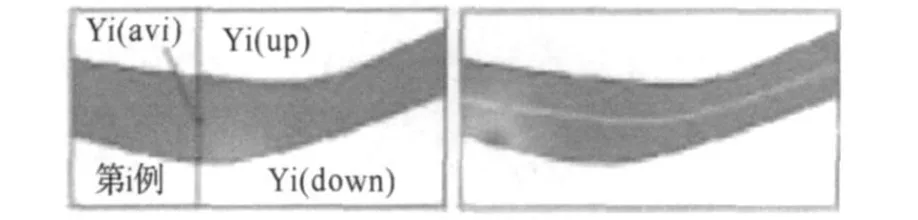
圖5 圖像線化處理示例
將這些數(shù)據(jù)存儲到文件中,準備進行參數(shù)求解和分析。由于顯示器的最小單位是像素,所以在求取Yi(avi)時必須用整型數(shù)據(jù)進行運算。這樣在所得到的中心線上會出現(xiàn)一些不光滑的地方。對此系統(tǒng)將數(shù)據(jù)讀到分析模塊中時,采用了線性插值和二次曲線插值的方法來進行平滑處理,獲得了良好的效果。
4.1.4 虛擬擴展通道
本文的虛擬儀器[6]采用DASP智能數(shù)據(jù)采集和信號處理系統(tǒng),通道設置如圖6所示,上半部為采集器的物理參數(shù)設置,下半部是虛擬通道參數(shù)設置[7]。
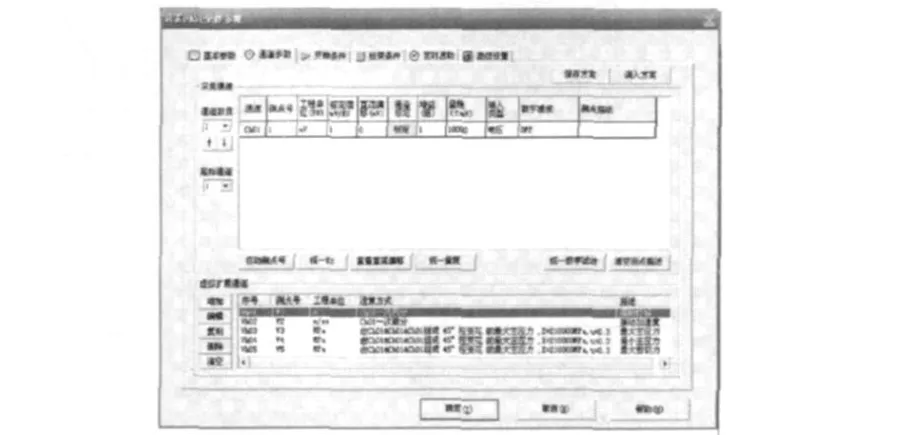
圖6 物理通道和虛擬通道設置
4.1.5 振動參數(shù)頻譜分析
通過上述各步驟的圖像處理工作,以圖6為例可以獲得結構(如橫梁)上的任意點的X(k)采樣函數(shù)。參數(shù)分析的基本算法[8]就是對X(k)進行離散傅立葉變換,并在頻域內(nèi)進行分析處理。通過對幅值/相位圖的分析,就能得到各階振型的頻率和其它所需要的各種參數(shù)。
采用虛擬微積分通道還具有不受信號端點截斷的影響,因為采集儀得到的信號是連續(xù)的。若采用采集后再進行微積分轉換,則可能在數(shù)字信號兩端出現(xiàn)嚴重的波形畸變現(xiàn)象。
需要說明的是,基于梯形法等的傳統(tǒng)微積分運算方法,對長時間的連續(xù)振動信號具有難以克服的缺點,積分操作易受信號基線和低頻漂移的影響導致積分后波形基線的大幅波動,微分操作則易受信號局部噪聲的影響導致微分后波形噪聲比較大。因此在AVD三測量中,對長時間連續(xù)振動波形需要采取考慮波形全程特性的微積分運算手段,才能保證獲得理想的微積分虛擬通道信號。
5 對系統(tǒng)的實驗室驗證
試件采用圖7所示的一維振動結構,其具體結構如圖7所示。
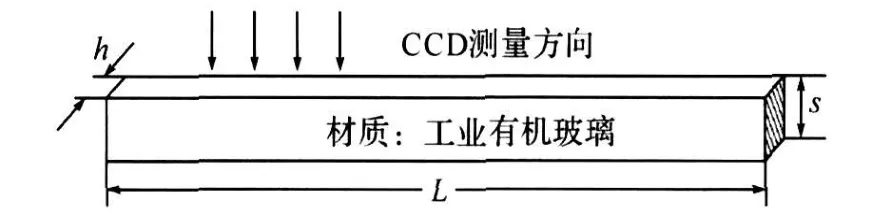
圖7 待測結構說明
用本系統(tǒng)對其振型作了測量和分析。所使用的待測物體的材料為有機玻璃,總長為110cm寬度為5cm厚度為0.4cm,攝像頭垂直照射在厚度方向上。將攝像系統(tǒng)的采集速度設為24幅/秒,在該試件上加上兩個質(zhì)量適當?shù)捻来a作為配重來控制振動頻率。根據(jù)振動理論,如果改變配重 M1和M2的質(zhì)量,或者改變長度a和b的值(見圖7)都會引起各階振型所對應的頻率發(fā)生移動。因此,在改變這些參數(shù)的條件下進行了大量的數(shù)據(jù)采集與分析實驗。選取了兩張有代表性的頻譜曲線進行比較。如圖8、圖9所示。
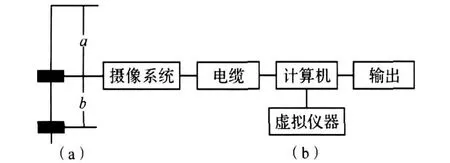
圖8 高速攝像系統(tǒng)結構框圖
在圖9(a)、(b)兩張頻譜圖上,可以清晰地看到一階振型和二階振型所對應的頻率發(fā)生了移動。而且經(jīng)過計算可以發(fā)現(xiàn)兩張圖上頻率比值也發(fā)生了變化。這正是由于改變了配重 M1和 M2在待測物體上的位置,根據(jù)振動理論,必然會發(fā)生這種現(xiàn)象。由此也就間接地證明了本系統(tǒng)的可用性。再通過建立初步數(shù)學模型計算出的AVD值與虛擬通道記錄的AVD值相比較,數(shù)值基本一致。
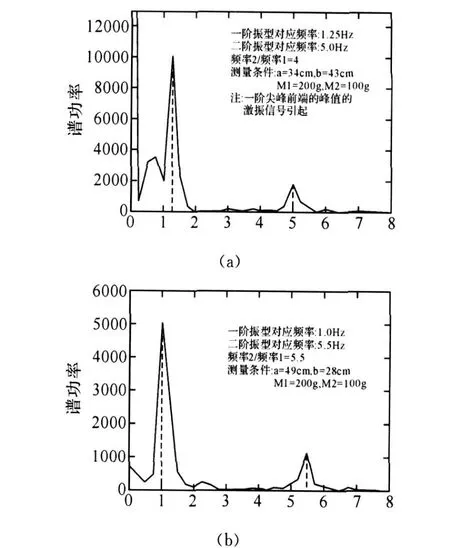
圖9 待測結構振動頻譜分析曲線圖
6 系統(tǒng)應用及可能遇到的問題
本系統(tǒng)為達到精確、高效的目的。以一種車載武器發(fā)射裝置為例,測量發(fā)射系統(tǒng)的水平、垂直和射向三個方向的一維振動量(如圖10)就可獲得該發(fā)射系統(tǒng)的特征值和AVD值。
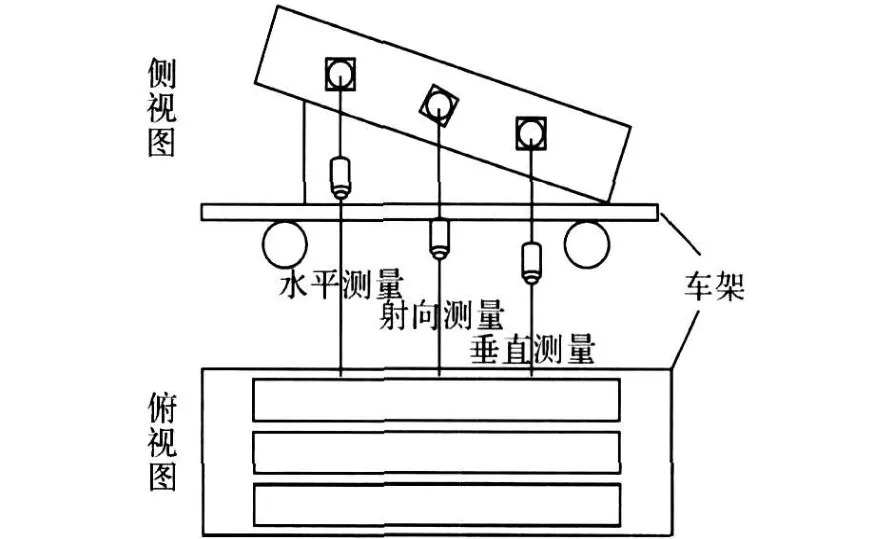
圖10 攝像頭位置圖
仍存在一些可能影響測量結果的問題:
1)攝像系統(tǒng)測量時的固定位置選擇;
2)日光、背景對攝像系統(tǒng)的影響;
3)發(fā)射時,尾焰的熱和光對攝像系統(tǒng)的影響;
4)發(fā)射瞬間,氣流對攝像系統(tǒng)的沖擊;
5)發(fā)射時,煙塵對攝像系統(tǒng)的影響。
針對以上問題,可采用以下辦法解決或減少影響程度:
(1)攝像系統(tǒng)攝像頭固定在測量點2~4m的地方,以遠離氣流沖擊和看清目標點為標準;
(2)攝像頭處加裝遮光裝置減少日光和發(fā)射時火光、煙塵影響;
(3)在發(fā)射裝置后面裝氣流導向板,減少氣流對攝像頭的沖擊。
[1]張三喜,姚敏,孫衛(wèi)平.高速攝像及其應用技術[M].北京:國防工業(yè)出版社,2006
[2]徐青,張艷,耿則勛.遙感影像融合與分辨率增強技術[M].北京:科學出版社,2007
[3]沈鳳池.圖形圖像處理技術[M].北京:人民郵電出版社,2006
[4]應懷樵.現(xiàn)代振動與噪聲技術[M].北京:航空工業(yè)出版社,2008
[5]賈永紅.數(shù)字圖像處理[M].武漢:武漢大學出版社,2003
[6]劉進明,應懷樵.虛擬擴展通道采樣技術[M].北京:北京東方振動和噪聲技術研究所,2008
[7]應懷樵.DASP-V10操作使用手冊[M].北京:北京東方振動和噪聲技術研究所,2008
[8]謝官模.振動力學[M].北京:國防工業(yè)出版社,2007
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學物理學報(2017年6期)2018-01-22 02:26:40
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21