DCL2-32型連續式搗固車連續作業模式撥道修正值分析
2011-05-04 08:40:34潘亞嘉劉三忠
鐵道建筑 2011年7期
王 勝,潘亞嘉,丁 坤,劉三忠
(西南交通大學 機械工程學院,成都 610031)
襄樊金鷹軌道車輛有限公司生產的DCL2-32型搗固車有連續作業模式和步進作業模式,在連續作業模式下,需要實時檢測C點檢測小車與A,B,D點檢測小車的相對位移關系,用以計算修正值。本文重點介紹連續作業模式下的四點法檢測撥道修正值計算模型。
1 B點偏離對C點矢距的影響
連續式搗固車在連續作業模式下,主車連續走行,搗固小車步進走行,主車上的A,B,D點檢測小車間的相對位置不發生改變,C點檢測小車與A,B,D點檢測小車間的相對位置時刻變化。如圖1所示,假設在撥道的瞬間,C點小車偏離靜態位置的距離為Δx。
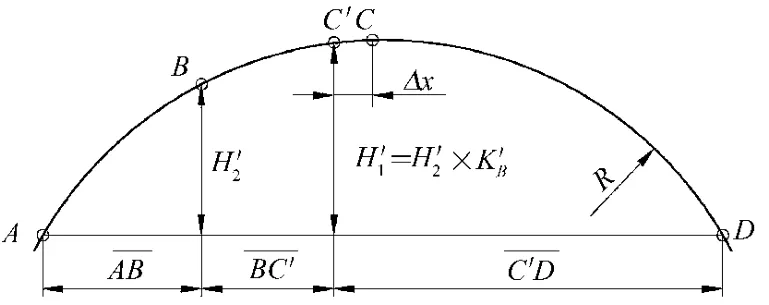
圖1 連續作業模式下四點法檢測
設C點檢測小車到C'時,B,C點檢測小車測量的矢距分別為 H'2,H'1,則有K'B定義為連續作業模式下B點偏離對C點矢距的影響系數。
2 D點偏離對C點矢距影響
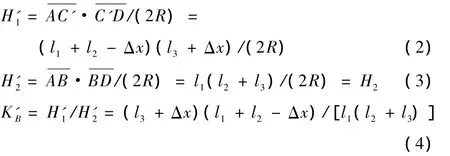
如圖2所示,點劃線表示正確的軌道位置,實線段AB為整正后的線路,實線段BD為未整正的線路。C點的矢距隨C點的位置變化而變化,小車由C點移動Δx到 C',C點矢距為 H1,C'點矢距為 H'1,B 點矢距為H2,D點偏移距離為 FD,C'點殘留偏差為F'C,撥道作業只能將軌道移動到虛線位置。
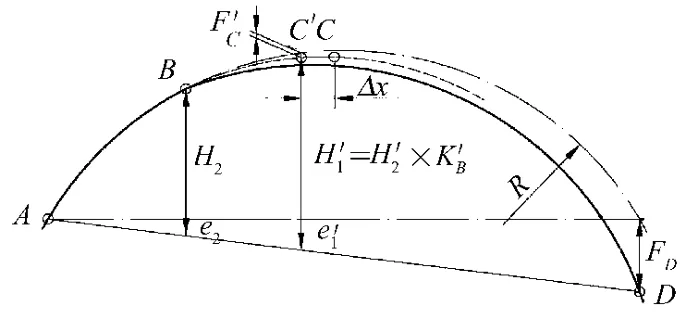
圖2 四點法檢測連續作業模式的偏差分析
偏差F'C可由下列方程組求出
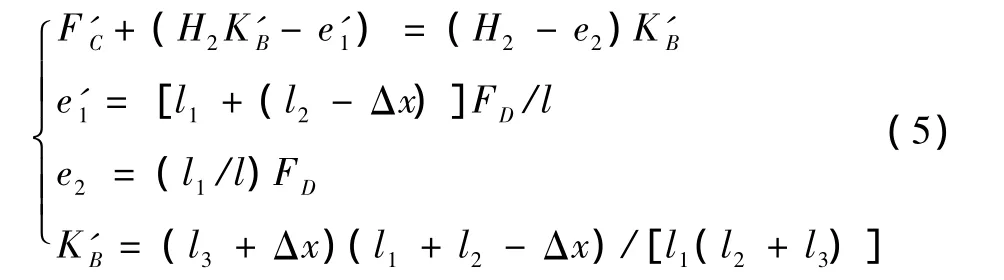
如圖2,式(5)中,e'1為連續作業模式下D點偏移對C'矢距的影響量;e'1為連續作業模式下D點偏移對B點矢距的影響量。
解方程組式(5)得出

3 撥道過程數學模型
如圖3所示,連續作業模式下四點法檢測撥道有以下規律:D點檢測小車處于未整正曲線上,C點檢測小車處于即將撥動的軌道上,A,B點檢測小車處于已整正的曲線上,A,B,D點檢測小車間相對位置固定,C點檢測小車與A,B,D點檢測小車間有相對運動。
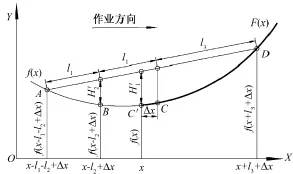
圖3 連續作業模式下四點法檢測撥道數學模型
如圖3所示,C點檢測小車與 A,B,D點檢測小車間產生相對位移Δx時,以C'橫坐標為X軸建立直角坐標系,F(x)為未經整正的線路曲線,f(x)為經過整正的線路曲線,建立方程有
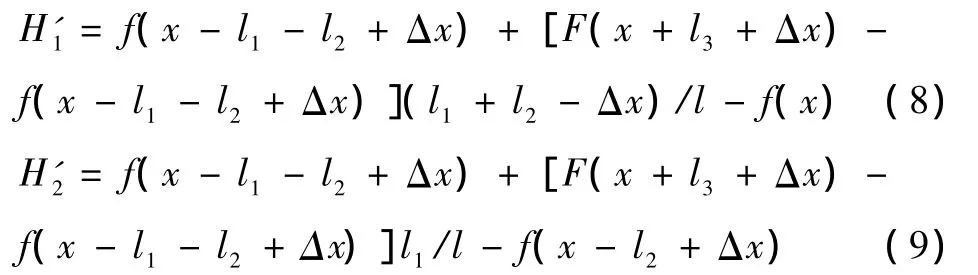
又H1'=H2'KB',將式(8)及式(9)代入整理得
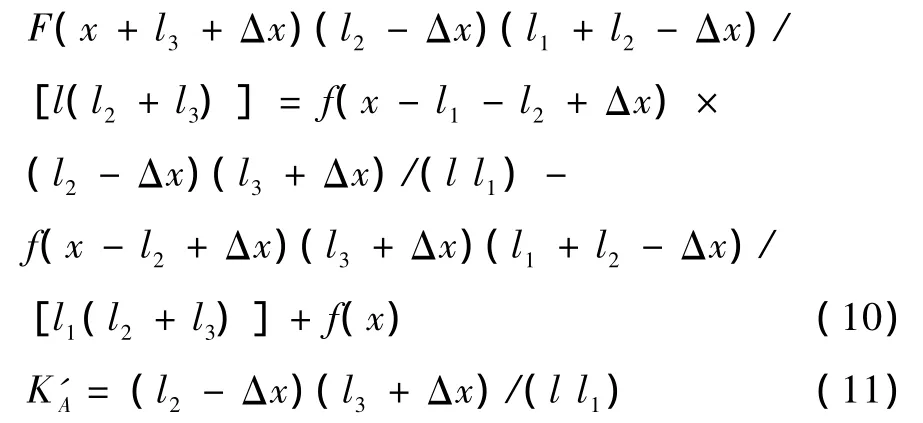

可以看出,搗固車撥道過程是根據撥道前的線路線型F(x)求撥道后的線路線型f(x)。
4 修正值計算模型
撥道修正,即根據作業方向上各檢測點所處位置的鋼軌線型,計算出各檢測點偏離圓曲線的大小對C點的理論影響值,然后對實測的撥道量進行修正。
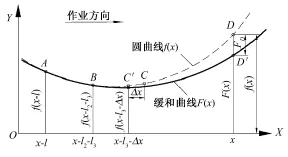
圖4 連續作業模式下四點法檢測撥道修正值計算
如圖4所示,搗固車連續作業模式下四點法檢測撥道時,A,B,C三點處于圓曲線上,C點與 A,B,D 點間有相對運動,對應D點的D'點在緩和曲線上,D點偏移量FD為

設FD對C點矢距的影響值為V4'(C點的修正值)為

又根據式(12)推得

將式(15)代入式(14),得出連續作業模式下四點法檢測撥道時修正值計算的數學模型V'4為

同理寫出連續作業模式下三點法檢測撥道時修正值計算的數學模型V'3為

式中,K'3D、K'3B分別是三點法檢測時 D,B點對 C'點矢距的偏離影響系數,其值為

5 總結
在曲率變化的緩和曲線上以及線型變更點處,需要針對不同的線型計算撥道量的修正值,要求出連續作業模式下不同線型處單弦法檢測撥道修正值的計算方程式,包括在有緩和曲線的直緩點、緩圓點、圓緩點、緩直點四種線型變更點處的修正值計算方程,以及在無緩和曲線的直圓點、圓直點處修正值計算方程,只需將各檢測點的線型方程式代入修正值計算的數學模型計算撥道修正值。
[1]韓志清,唐定全.抄平起撥道搗固車[M].北京:中國鐵道出版社,1996:137-150.
[2]蔣剛.D09-32型連續式搗固車撥道原理分析[J].鐵道建筑,2008(10):107-109.
[3]謝寅山.D09-32連續式搗固車工作小車的撥道補償數學幾何原理[J].科技情報開發與經濟,2008(21):134-136.
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
故事大王(2016年7期)2016-09-22 17:30:08
海峽科技與產業(2016年3期)2016-05-17 04:32:12