一種新型平板式壓電六維力/力矩傳感器及仿真實驗*
2011-05-06 01:57:42劉京誠
傳感技術學報 2011年3期
關鍵詞:晶片
劉 俊,秦 嵐*,李 敏,劉京誠,薛 聯
(1.重慶大學光電技術及系統教育部重點實驗室,重慶400044;2.四川理工學院,四川 自貢629200)
彈射座椅是影響飛行員身體健康的關鍵設備,也是在飛機出現危急情況時進行彈射逃生的重要救生裝備。座椅動態乘坐舒適性是影響飛行員身體健康的直接因素,人椅系統在彈射出艙后的良好穩定性是決定飛行員能否實現安全救生的關鍵因素之一。人椅系統動態特性的實時測試數據可以為座椅的舒適性調節提供幫助,人椅系統的組合重心數據是座椅彈射動力穩定性調節設計的關鍵依據[1-2]。目前對人椅系統重心分布模型的研究主要是運用靜態測試結合統計分析的方法[2],而對座椅動態特性的研究主要是通過建立座椅系統動力學模型來預測[3],且未能得到實際工作條件下的實際測試數據。六維力/力矩(以下簡稱六維力)傳感器可以實現對人椅系統重心位置和動態特性的測試[4-6],能裝載在座椅上的平板式六維力傳感器能提供人椅系統重心位置和動態特性的實時測試數據。
從傳感元件測量被測量原理的角度上看,現有的六維力傳感器可分為彈性體式和非彈性體式兩類。彈性體式由于存在感知和測量外力信息的彈性體,導致其始終存在:彈性體結構復雜程度與解耦之間的矛盾問題[7]、高固有頻率與高靈敏度之間的矛盾問題[8]、彈性體質量大小與解耦之間的矛盾問題[9]等三大瓶頸矛盾問題。這些瓶頸問題不同程度影響了傳感器性能的進一步提升,制約著多維力傳感器應用空間的拓展。為此,研究者開始了對直接感知被測力這種測量原理的非彈性體式六維力傳感器的研究,這類六維力傳感器選用壓電元件作為傳感元件,但目前對其研究很少。劉巍等[10]將壓電石英晶片嵌入Stewart平臺的6條腿內部,每條腿通過球鉸與上下平臺相連,但未見其后續相關理論研究結論;孫寶元等[11]將四個三維壓電力傳感器均勻分布在同一圓周上并夾裝在上下安裝平臺之間,實現了對大力值的測量,解耦后維間耦合干擾低于3%,固有頻率低于5 kHz,X和Y向的載荷分布比例低于8%。上述研究成果很好地克服了現有彈性體式六維力傳感器的瓶頸矛盾,但由于無法直接安裝在座椅下方,難以直接用于人椅系統重心位置和動態特性的實時測量中。
為此,本文提出了一種具有高剛度、高靈敏度、高固有頻率,可加工較大安裝面積、厚度小等特點的能安裝在座椅安裝面上、能實現對作用力(即人椅重心)空間位置和動態特性實時測量的平板式壓電六維力傳感器,討論了其數學模型,運用ANSYS軟件對傳感器的靜、動態特性進行了仿真,并對載荷傳遞系數、耦合特性和退耦矩陣等參數進行了研究,得到了預想的實測結果。
1 傳感器的結構與工作原理
自Kistler公司成功研制出電荷放大器以來,石英晶體以其優越的特性被廣泛用于力和加速度的測量[12]。壓電式力傳感器按照石英晶片結構分類可以分為整體式和分列式(也叫平面展開式、陣列式)兩種。整體式是指內部壓電晶片為一個完整的圓片或圓環狀片,分列式是指若干組小型晶體元件以一定規律均勻排列在力傳感器內的晶片布置形式。整體式結構能夠減少傳感器的截面積,但設計的多維力傳感器維數不能大于3,無法用于做大尺寸六維力傳感器,且由于石英晶片為空間堆疊結構,故而難以用MEMS工藝實現,分列式結構可以避免整體式結構的這些弱點。
圖1為平板式壓電六維力傳感器的實物照片,本傳感器屬分列式結構,主要由蓋子、石英晶片組、信號輸出電極、絕緣填充劑和基座組成。基座和蓋子均屬于一次加工成型,在施加適當預應力后,運用電子束焊接技術將蓋子和基座焊接在一起;絕緣填充劑是為了保證傳感器內部信號傳輸線之間的高絕緣性;夾裝在蓋子和基座的晶片安裝凸臺上的石英晶片組均勻分布在同一圓周上。為了克服維間干擾,所有的石英晶片均選用圓形;為了提高文獻[11]設計方案中傳感器的剛度,進一步簡化文獻[13]中傳感器的結構,作者提出了如圖2所示的石英晶片組八點支撐分布結構。八組石英晶片組均勻分布在同一圓周上,四組Y00切型石英晶片組分布在X、Y軸與圓周的交點上,承擔對FX、FY和MZ三個參量的測量;四組X00切型石英晶片組分布在其它四個位置,承擔對參量FZ、Mx和My的測量。
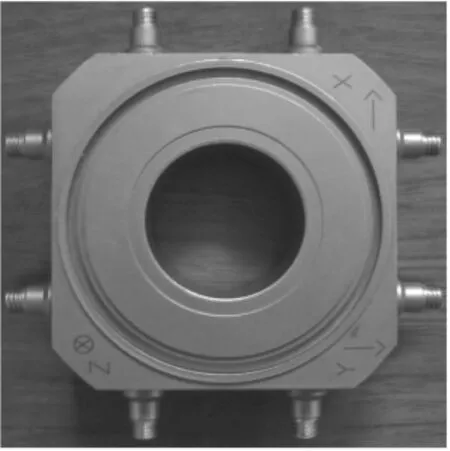
圖1 壓電六維力/力矩傳感器照片
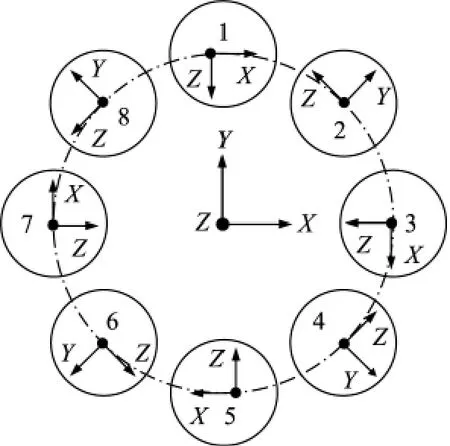
圖2 石英晶片組布局
2 傳感器的靜態數學模型
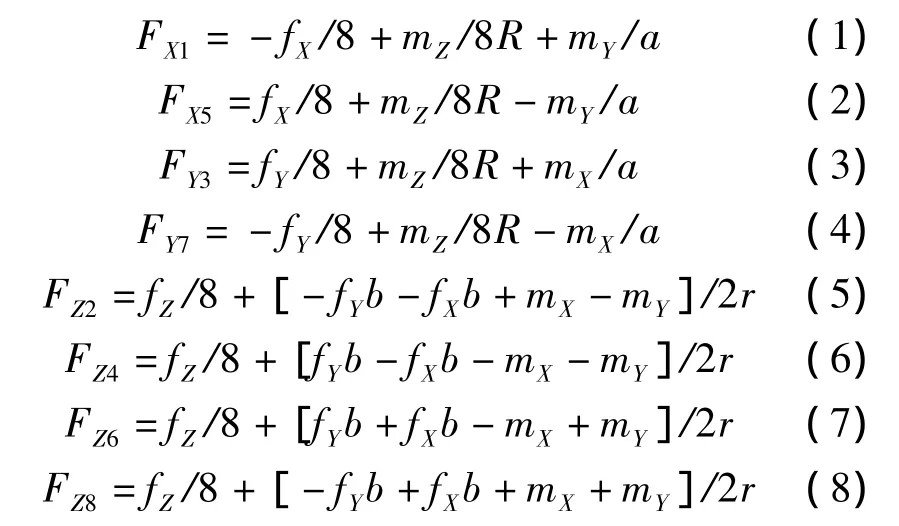
圖3是傳感器的結構簡圖,八組石英晶片組均勻分布的圓周半徑為R,四組X00切型石英晶片組分布在邊長為的正方形四個角上,即與傳感器的幾何中心的距離為,傳感器的力作用點與石英晶片表面的距離為b,Mx(My)對Fy(Fx)產生的耦合力臂系數為a,O-XYZ為被測力作用點的坐標系,O1-X1Y1Z1是壓電石英晶片的安裝布局位置坐標系。為了簡化分析,對傳感器的受力作如下假設:傳感器蓋子為剛體,且各向剛度相同,靈敏度相等且均勻分布;力FZ、力矩Mx和My在八組石英晶片組之間按杠桿原則分布;力FX、FY、力矩MZ在八組石英晶片組之間平均分配。設被測外力/力矩分別為 fX、fY、fZ、mX、mY和 mZ,石英晶片響應輸出為FX、FY、FZ、Mx、My和 MZ,當外力/力矩作用在傳感器蓋子的中心上時,則各組石英晶片組上的分力可用如下數學關系式表示:
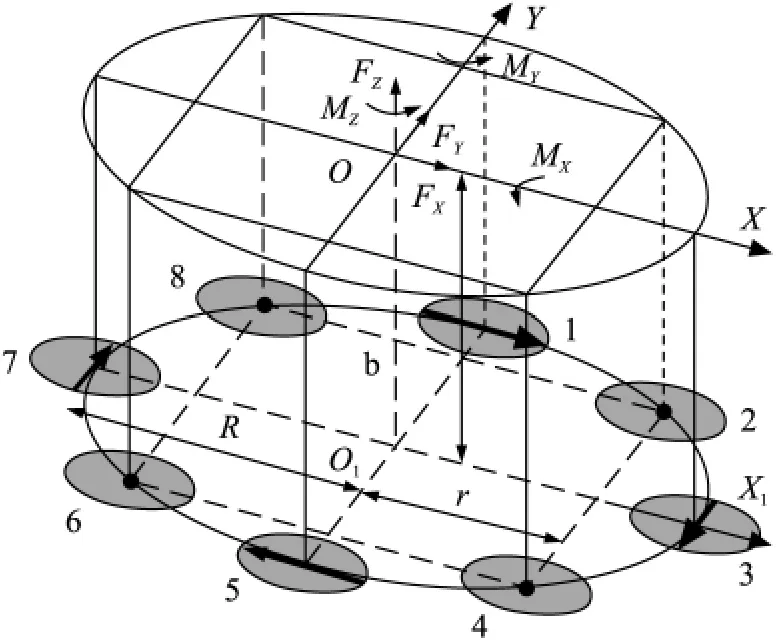
圖3 傳感器結構簡圖
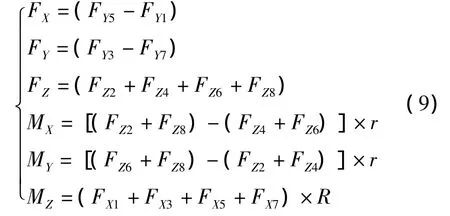
根據空間力系的平衡原理,能夠得到:
由于實際中,并不完全滿足上述假設條件,故需要引入 kfX、kfY、kfZ、kmX、kmY和 kmZ等載荷傳遞效率(比例)的概念,這些參數由傳感器的結構、石英晶片組的分布形式、數量和制作工藝水平決定。
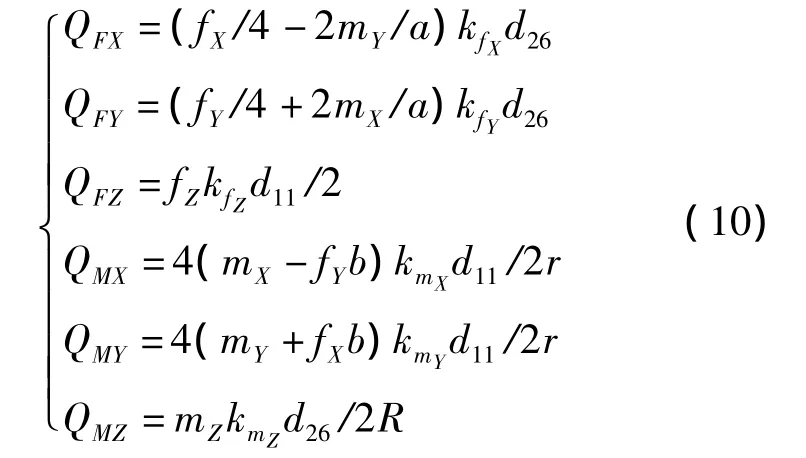
根據壓電系數矩陣,結合式(9)很容易得到六維力傳感器的六路輸出電荷輸出響應如式(10)所示(d11=2.31 pC/N、d26=4.62 pC/N),理論上在忽略六維力傳感器結構影響的條件下,六維力/力矩之間沒有相互的維間干擾,但實際情況中,由于傳感器蓋子厚度的影響,Fx與MY、FY與MX相互之間存在交叉耦合,需要對傳感器的六路輸出進行解耦計算才能得到被測量。
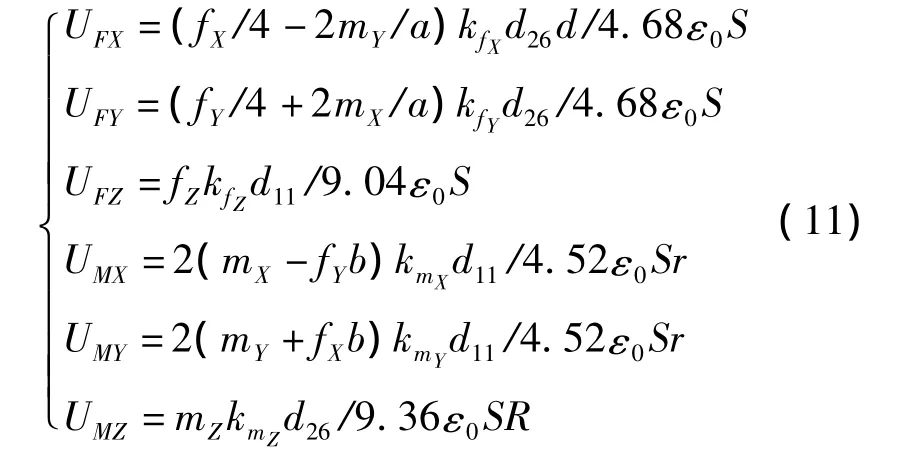
由于石英晶片可以看成是一塊薄平行板電容器,依據式C=ε0εrS/d(其中εr為石英的相對介電常數,X00切型石英晶片取4.52,Y00石英晶片取4.68,d 為石英晶片厚度,ε0為介電常數)、Q=CU可得到傳感器六路輸出電勢差:
3 傳感器的仿真實驗
根據傳感器的研制指標要求(Fx、FY和Fz的測量范圍都為0~1 000 N,MX、MY和MZ的測量范圍都為0~100 N·m,解耦后的維間耦合<=5%),結合傳感器尺寸緊湊的設計思路,傳感器主要部件的結構尺寸見表1。
表1 傳感器模型參數 (單位:mm)
3.1 FEM建模
ANSYS軟件具有強大的耦合場分析能力,是目前壓電分析的首選軟件。在進行有限元建模過程中,首先運用Solidwork2006建立傳感器的結構模型,然后借助ANSYS提供給Solidwork2006的接口將模型導入ANSYS中,選用耦合單元SOLID98作為石英晶體的單元類型,并且輸入石英晶體材料的壓電系數,彈性系數和介電常數矩陣,同時按照圖2中晶片組的布局要求為每一組晶片組建立局部坐標系,選用映射方式劃分網格。其它的部件材料選用不銹鋼,彈性模量 E=2 ×1011Pa,泊松比 μ =0.3,單元類型選用SOLID95,對這些結構采用手動控制等分份數和自由網格劃分相結合的方式劃分網格,得到傳感器結構的有限元模型,如圖4所示。
圖4 傳感器有限元模型
3.2 載荷施加與求解
載荷施加主要包括約束和集中力/力矩載荷加載兩部分工作,在進行約束設置時,完全按照壓電式六維力傳感器安裝狀態進行相應設置,預緊力通過蓋子的斷面施加,基座的安裝面的全部自由度設為0,同時,為了去除實際中預緊裝置的影響研究本傳感器在理想工作狀態下的特性,特將傳感器蓋子下表面、石英晶片和石英晶片安裝面之間的接觸狀態設為始終綁定狀態。
為了模擬理想的集中力/力矩載荷加載情況,外載荷通過建立在Z軸上且與傳感器蓋子的上表面同平面上的關鍵點施加,關鍵點與蓋子上表面形成剛性區。分別在FX、FY、FZ三個方向單獨施加0~1 000 N的外力,在MX、MY、MZ三個方向單獨施加0~100 N·m 的力矩,然后分別進行求解,通過應力、電勢差、應變云圖、模態分析、諧響分析等研究傳感器的特性。
3.3 靜態特性仿真分析
由于ANSYS耦合場分析得到的是傳感器各組石英晶片面上的電勢差,要得到傳感器的電荷靈敏度可以通過式(10)~式(11)來轉換。圖5~圖10分別是傳感器FX、FY、FZ、MX、MY和 MZ方向的輸入 -輸出力 -電荷曲線,表2是六維力傳感器在未使用解耦矩陣前電荷靈敏度和維間干擾仿真結果,表中FX、FY、FZ的靈敏度單位為pC/N,MX、MY、MZ的靈敏度為單位為pC/N·m。
圖5 FX輸入/出力-電荷曲線
圖6 FY輸入/出力-電荷曲線
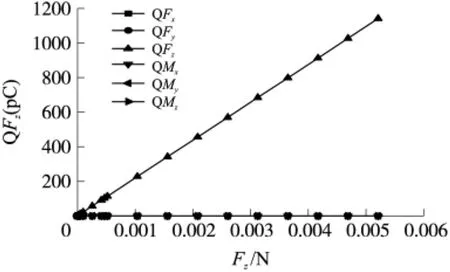
圖7 FZ輸入/出力-電荷曲線
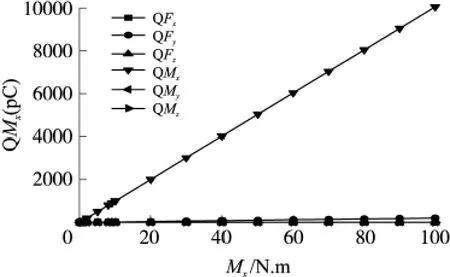
圖8 MX輸入/出力-電荷曲線
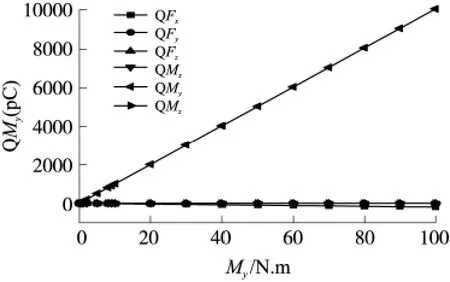
圖9 MY輸入/出力-電荷曲線
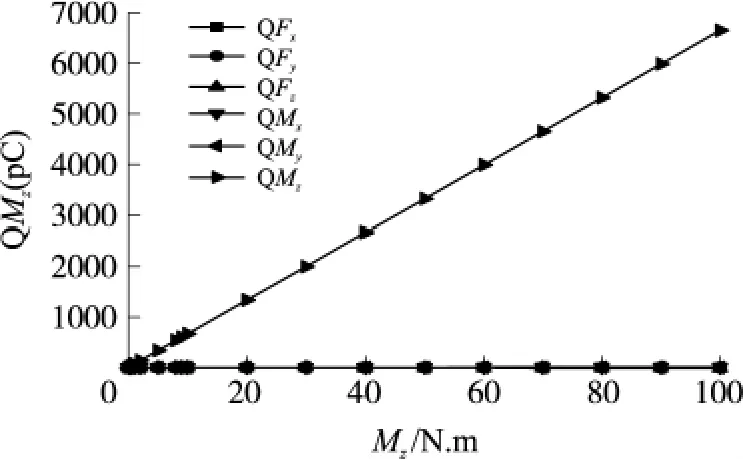
圖10 MZ輸入/出力-電荷曲線
結合式(10)和仿真結果可以看出:六維力傳感器FX、FY、FZ、MX、MY和 MZ各維的力—電荷靈敏度分別為0.84 pC/N、0.84 pC/N、1.14 pc/N、100.75 pC/N·m、100.75 pC/N·m、66.45 pC/N·m;在未使用退耦矩陣前,FZ、MX、MY和 MZ維輸出的維間干擾小于2%,FX(FY)維輸出受MY(MX)的影響很大,維間干擾高達60.5%,必須要通過退耦矩陣來消除。
根據傳感器在 fX、fY、fZ、mX、mY、mZ分別為1 N 或1 N·m作用下的輸出結果,結合式(9)可構建的6×6方陣Uij,據此可得到傳感器的退耦矩陣為Cij=[(Uij)T]-1=
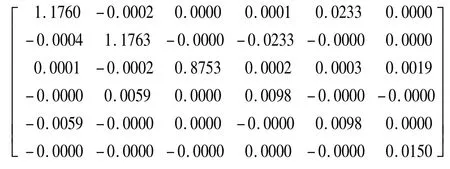
當同時加載6個力/力矩時,把傳感器的8路電荷輸出信號用電荷放大器轉換成電壓信號后,根據式(9)所示的解算方法,可以得到6×1的解算輸出信號矩陣,將退耦矩陣與此矩陣相乘就可得到傳感器的退耦輸出結果。仿真結果表明,解耦后傳感器的最大測量誤差≤0.61%,維間交叉耦合≤0.48%。
由于受六維力傳感器結構的影響,kfX、kfY、kfZ、kmX、kmY和kmZ等載荷傳遞效率不盡相同,石英晶片的力—電轉換效率與載荷傳遞效率直接相關,且在Fx、Fy和Fz三個方向上載荷傳遞效率與石英晶片的力—電轉換效率相等。對石英晶片的力電轉換效率研究,可以采用單片石英晶片的力-電荷靈敏度與該切型晶片實際的壓電系數相比較的方法。根據d11=2.31 pC/N、d26=4.62 pC/N,結合表2 的數據可以計算得到X00和Y00切型石英晶片上產生的力-電荷靈敏度為2.285 ×10-12C/N 和3.361 ×10-12C/N,即力電轉換效率分別為98.92%和72.75%,故kfX=kfY=0.727 5、kfZ=0.989 2。結合 X00和 Y00切型石英晶片力—電轉換效率等前述結論,根據式(1)~式(9)可以進一步推算出 kmX=kmY=0.925 2、kmZ=0.431 5。
3.4 動態特性仿真分析
平板式壓電六維力傳感器的主要特性都與其固有頻率有關,與輸入信號無關,Mz方向的動態特性與Fx、Fy方向的動態特性直接相關,Mx和My方向的動態特性一致,且與Fz方向的動態特性直接相關(見式9),故對平板式壓電六維力傳感器動態特性的研究只需研究Fx、Fy、Fz三個力方向的動態特性即可。對傳感器動態特性的仿真研究主要采用模態分析和諧響分析兩種方法。
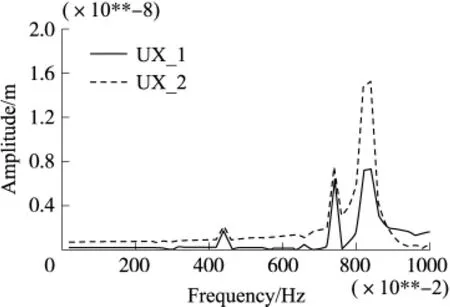
圖11 Fx—幅度-頻率響應曲線
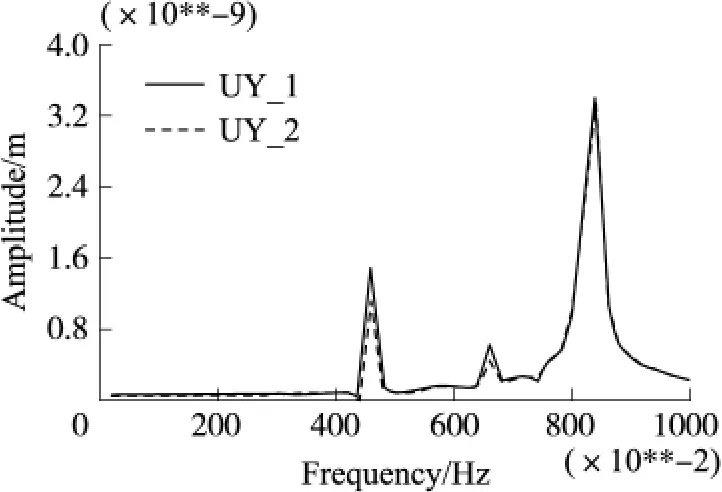
圖12 Fy—幅度-頻率響應曲線
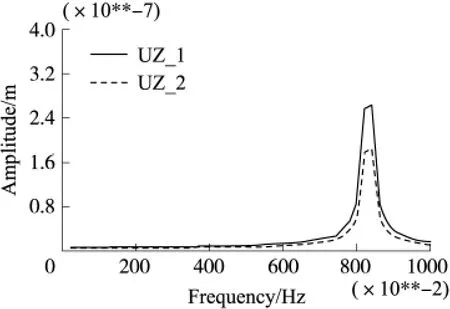
圖13 Fz—幅度-頻率響應曲線
固有頻率和振型是承受動態載荷結構設計中的重要參數,運用ANSYS對傳感器實施模態分析可以判斷傳感器的固有頻率和振型,其一階振動頻率的2/3可作為傳感器的固有頻率[14]。仿真結果顯示本傳感器在Z向預應力條件下,1~6階振動頻率分別為 40 206 Hz、40 225 Hz、46 662 Hz、47 050 Hz、48 247 Hz、48 270 Hz,故其固有頻率約為 26.8 kHz。
諧響分析是用于確定線性結構在承受隨時間按正弦規律變化的載荷時的穩態響應的一種技術,分析的目的是計算結構在幾種頻率下的響應,找到峰值響應點。圖11~圖13是傳感器在施加Z向預應力條件下,X、Y、Z三個方向的諧響曲線,由于傳感器X和Y方向屬于對稱結構的緣故,故X、Y向的諧響分析結果是一致的,這與模態分析的結論一致。
4 結論
本文提出了一種新型平板式壓電六維力/力矩傳感器,并運用Solidwork軟件建立了傳感器的物理模型,推導了傳感器的靜態數學模型,采用ANSYS對傳感器的靜、動態性能進行了仿真實驗研究。結果表明:仿真分析方法正確、數學模型有效,傳感器固有頻率>25kHz,使用退耦矩陣后傳感器的維間干擾<1%,傳感器結構滿足設計要求。由于本文和文獻[15]都采用了壓電材料陣列式平面分布的設計思路,故而本文采用的設計方案亦適合研制基于MEMS工藝微六維力/力矩傳感器,但Mz向載荷傳遞效率較低,還需要進一步對傳感器的結構展開深入研究,以期進一步提高其性能。
[1]王春潔,曾福明.彈射座椅動態舒適性與人椅動力學特性研究[J].北京航空航天大學學報,2004,30(4):375 -378.
[2]孫明照,吳銘,蘇迅,等.飛行員人體參數與人椅組合重心的回歸分析研究[J].人類工效學,2005,11(2):23 -25.
[3]李寶峰,薛紅軍,宋筆鋒.基于SIMULINK的彈射救生人椅系統六自由度仿真[J].系統仿真學報,2007,19(6):1379 -1382.
[4]Chung W Y,Waldron K J.Wrench Reconstruction by Using a Six-Axis Force Sensor[J].Mech.Mach.Theory,1995,30(3):383-389
[5]Ming hua Luo,Masanori Ito,Etsuro Shimizu,et al.Development of a Six-Axis Force/Tactile Sensor for Robot Finger by Employing Spring Beams[C]//Industrial Electronics Society,2003 IECON’03.The 29th Annual Conference of the IEEE 2 - 6 November,2003,2:1505 -1510.
[6]韓壯志,王田苗,張玉茹,等.基于指端6維力傳感器的接觸點測量算法研究[J].北京航空航天大學學報,2004,30(5):400-404.
[7]張為公.一種六維力傳感器的新型布片和解耦方法[J].南京航空航天大學學報,1999,31(2):221 -222.
[8]Chao Lu-Ping,Chen Kuen-Tzong.Shape Optimal Design and Force Sensitivity Evaluation of Six-Axis Force Sensors[J].Sensors and Actuators A:Physical,1997,63(2):105 -112.
[9]吳寶元,吳仲城,申飛.多維加速度場中六維力傳感器慣性耦合特性研究[J].傳感技術學報,2008,21(10):1686 -1690.
[10]劉巍,林盛,賈振元,等.壓電式六維大力傳感器[P].中國,發明,申請號200710157931.2,2008-03-26:1 -8.
[11]Li Ying Jun,Sun Bao Yuan,Zhang Jun,et al.A Novel Parallel Piezoelectric Six-Axis Heavy Force/Torque Sensor[J].Measurement,2009,42(5):730 -736.
[12]劉俊,秦嵐,劉京誠,等.一種新型差動式壓電加速度傳感器[J].光學精密工程,2007,15(6):903 -909.
[13]劉俊,秦嵐,劉京誠等.一種平板式壓電六維力傳感器[P].中國,發明,ZL200810069720.8:1 -16.
[14]Song A G,Wu J,Qin G,et al.A Novel Self-Decoupled Four Degreeof-Freedom Wrist Force/Torque Sensor[C]//Measurement:Journal of the International Measurement Confederation,November/December 2007,40(9 -10):883 -891.
[15]Nemirovsky Y,Nemirovsky Z A,Muralt P,et al.Design of a Novel Thin Film Piezoelectric Accelerometer[J].Sensors and Actuators A:Physical,1996,(56):239 -249.
猜你喜歡
電子器件(2021年4期)2021-10-26 12:27:18
海洋工程裝備與技術(2020年6期)2020-03-09 00:17:16
兵器裝備工程學報(2019年6期)2019-07-05 00:40:48
測控技術(2018年8期)2018-11-25 07:42:16
電子工業專用設備(2016年8期)2016-08-24 09:39:59
電子世界(2016年22期)2016-03-12 22:15:32
超硬材料工程(2016年1期)2016-02-28 22:20:04
振動、測試與診斷(2014年1期)2014-03-01 01:13:42
航天器環境工程(2011年4期)2011-06-08 05:03:08
電子工業專用設備(2011年10期)2011-06-04 04:36:48