踝關節假肢的機械結構設計
2011-05-08 01:21:20王禎祥趙偉欽
中國新技術新產品 2011年2期
王禎祥 尚 昆 阮 超 趙偉欽 郭 丹
(上海理工大學醫療器械與食品學院,上海200093)
引言:根據2006年國務院殘疾人工作委員會抽樣調查數據顯示,全國肢體殘疾人數約為2400萬人[1]。近年來,隨著工業、交通業的迅速發展,這一數字正以驚人的速度增加,極大地增加了社會的負擔。在現有醫療水平尚不能使肢體再生的情況下,為了幫助肢體殘疾者恢復一定的生活自理和工作能力,提高其生活質量,為殘疾人開發和研制現代化舒適的假肢產品成為國內外假肢行業的一項重要任務。
假肢的作用是代償肢體傷殘者所失去的部分肢體功能,使其恢復一定的生活自理和工作能力。在現今假肢行業中,踝關節假肢作為人體下肢的重要組成部分,也是最為靈活的部分。在理論研究和實用產品設計方面都有很大的發展,但與髖關節和膝關節假肢的設計和產品相比,相關研究都比較滯后,使得假肢踝關節產品未能很好的滿足假肢患者的需求。
本文從生物力學、解剖學和生理學角度出發[2-3],分析了踝關節在行走過程中的步態運動規律、受力特點和生理功能。基于仿生學原理,設計了踝關節假肢的機械結構,完成了假肢產品開發和生產的前期工作。
1 踝關節的生物力學分析
踝關節是既穩定又靈活的負重關節,是人體與地面接觸的樞紐。人體能夠完成站立、行走、下蹲、跑跳等動作,與踝關節的結構及肌肉的動力作用密切相關。在人體行走的整個步態周期中踝關節起著至關重要的作用。在著地支撐階段,腳跟著地后踝關節背屈吸收地面給人體的沖力,當沖力下降到足夠小時,屈曲停止,開始回復,使身體重心始終保持水平動量,繞支撐腳轉動實現從支撐階段到推進階段的平穩過渡。在整個后蹬階段,由蹬地腿的彎曲位置開始踝關節伸展跖屈為行走提供動力,在擺動階段從腳尖離地開始擺動腿稍折疊踝關節,使足向前擺動保證運動的平穩性。
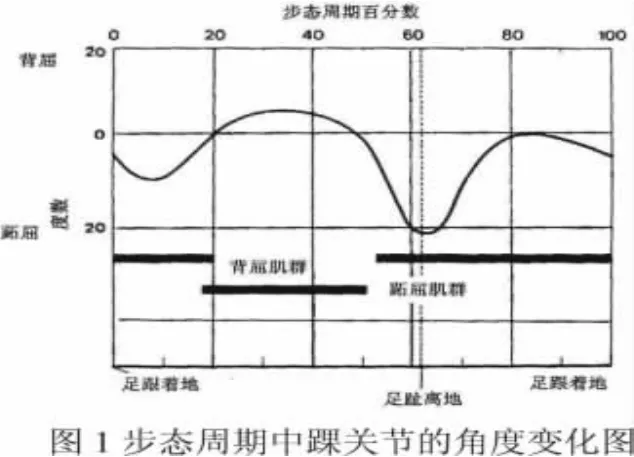
臨床實驗研究和分析發現踝關節在腳跟著地時產生輕微的背屈作用力。隨著承重的增加很快產生跖屈作用力,跖屈作用力在足平著地時達到最大,從支撐中期開始產生較強的背屈作用力,并在蹬離期達到最大。整個人體步態周期中踝關節的角度變化如圖1所示。在足平著地和支撐中期關節跖屈達到15°,后脛骨向前方旋轉至約3°,背屈位之后背屈繼續增大,到蹬離期漸漸跖屈至腳趾,離地期跖屈至最大角度20°,之后在背屈肌群的作用下產生背屈至最大5°,使腳尖順利抬起。整個過程中踝背屈肌群主要是為保護踝關節,不至使其急劇跖屈損壞關節。而跖屈肌群則是起到阻尼作用防止背屈,同時驅動和防止膝猝屈,也為腳尖順利抬起提供動力。作為人體最為靈活的關節,踝關節除了有冠狀面的跖屈、背屈運動外同時還有內外翻和內外旋運動,這些運動有效的保證了踝關節正常的功能,最大程度的滿足了人體運動的要求。踝關節的功能主要是背屈、跖屈與負重,因此在踝關節機械結構設計以及運動設計中,既要保持其負重的穩定性,又須注意活動的靈活性。
2 踝關節的機械結構設計
基于人體生理學、人體解剖學、人體生物力學的原理和人體踝關節在步行時的受力特點和生理功能,對踝關節假肢的機械結構進行設計,整個踝關節假肢的機械結構由三部分組成,分別為穩定性機械結構部分、屈伸運動功能機械結構部分和輔助裝置機械結構部分。
2.1 穩定性機械結構。穩定性結構[4]是踝關節在正常運動過程中,保證其平穩的在矢狀面內運動的同時能夠在其它矢量平面內也有分運動,但是變化角度都比較小。這樣既可以增加關節運動的靈活性和適應性,同時也要模仿人體自身踝關節的內外側三角韌帶,當關節角度變化很大時可以及時的調整關節回到正常的穩定區域。正常的關節運動變化是限制在一定的角度范圍,這是與韌帶自身產生的拉力變化以及回復能力相關聯的。韌帶的變化既要保證關節有一定的運動變化范圍,同時也可以回復到原始的運動狀態。踝韌帶對踝關節的穩定性起著重要的作用。當人體在正常行走過程中,如果路面存在一定的不平整性,踝關節的內外翻運動可以有效的保證人體運動的穩定性,以及防止踝關節著地緩沖時造成關節損傷。所以韌帶模型的設計是踝關節模型設計的重要組成部分。韌帶在踝關節運動時起到拉力以保證踝關節穩定性的作用,并且這種力學關系是屬于非線性的,因此采用非線性的壓簧模型進行設計,踝關節具體運動模型和穩定性模型分別見圖2和圖3,踝關節穩定性機械結構設計如圖4所示。

圖2 踝關節運動模型
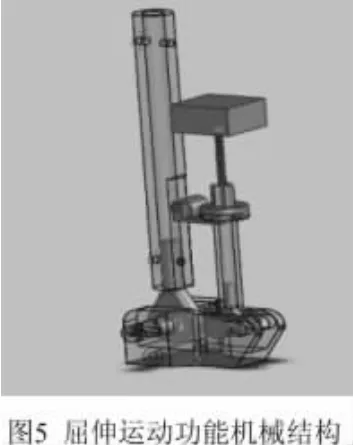
2.2 屈伸運動功能機械結構。屈伸運動是通過絲桿、滾子、軸承等轉動或傳動來實現。踝關節在矢狀面的背屈、跖屈運動是通過絲桿在轉動過程中帶動下面的軸承在規定的角度范圍內運動,同時絲桿的旋轉作用帶動滾子做上下運動,并通過軸承運動軌跡的限定裝置來實現關節的運動和幅度是在一定的限制范圍內,但又必須能夠滿足正常人體踝關節的屈伸運動變化范圍,最終來實現踝關節的屈伸運動功能,具體設計的踝關節屈伸運動功能的機械結構模型如圖5所示。
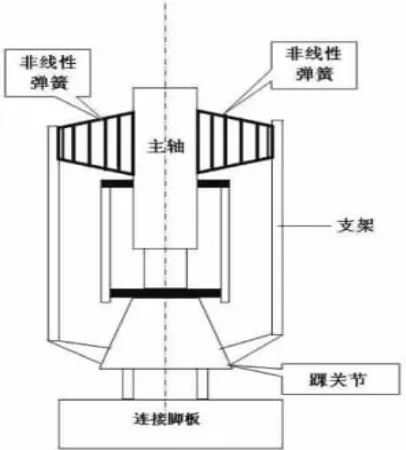
圖3 踝關節穩定性模型

圖4 穩定性機械結構
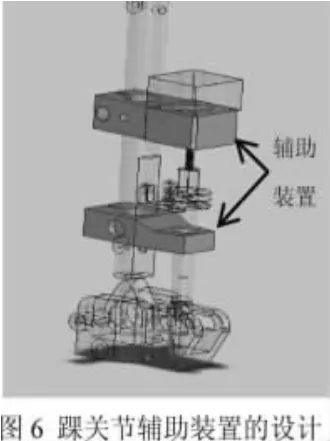
2.3 輔助裝置機械結構。輔助裝置機械結構主要是為了固定軸承與軸承之間的距離,同時起到支撐和固定踝關節的作用,保證整體設計的美觀性和合理性。輔助裝置具體部件如圖6箭頭表示的零部件。
結論:本文從生物力學、解剖學和生理學角度出發,分析了踝關節在行走過程中的步態運動規律、受力特點和生理功能。基于仿生學原理,設計了踝關節假肢的機械結構,通過SOLIDWORKS三維實體開發平臺進行仿生踝關節的實體建模,繪制了相關部件的機械結構圖,完成了假肢產品開發和生產的前期工作。
[1]中華人民共和國國家統計局.2006年第二次全國殘疾人抽樣調查主要數據公報 [J].中國康復理論與實踐,2006(12):1013.
[2]華佳,顧海燕,王偉力等.正常踝關節內外側韌帶的解剖及其影像學表現 [J].解剖學雜志,2007,30(5):609-613.
[3]毛賓堯.人工踝關節外科學[M].人民軍醫出版社,2005.
[4]夏昊昕.下肢康復訓練機器人的研究[D].哈爾濱工程大學,2003.
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
當代工人(2020年8期)2020-05-25 09:07:38
中華詩詞(2019年7期)2019-11-25 01:43:04
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49