探頭自動(dòng)起落控制在無(wú)縫管超聲波檢測(cè)中的研究
2011-05-11 02:48:40張文潔
制造業(yè)自動(dòng)化 2011年1期
張文潔, 王 左
(遼寧科技大學(xué),鞍山 114051)
探頭自動(dòng)起落控制在無(wú)縫管超聲波檢測(cè)中的研究
張文潔, 王 左
(遼寧科技大學(xué),鞍山 114051)
0 引言
在無(wú)縫管超聲波自動(dòng)探傷過(guò)程中,由于探頭數(shù)目較多(一般為8的倍數(shù)),因此在檢測(cè)過(guò)程中,為了保證每個(gè)探頭能夠進(jìn)行有效范圍的檢測(cè),必須采用相應(yīng)的控制措施保證探頭能夠依次起落,這樣才能夠控制掃描盲區(qū)(50mm以內(nèi))并符合自動(dòng)化探傷的需求。探頭自動(dòng)起落控制屬于電控的一部分,其基本原理是:計(jì)算機(jī)首先通過(guò)檢測(cè)光電開關(guān)的信號(hào),判斷鋼管是否進(jìn)入探傷區(qū),在固定的間隔內(nèi),得到水平行車的運(yùn)行速度和距離,根據(jù)每個(gè)探頭與光電開關(guān)的位置關(guān)系,判斷探頭的起與落。其工藝過(guò)程如圖1所示:
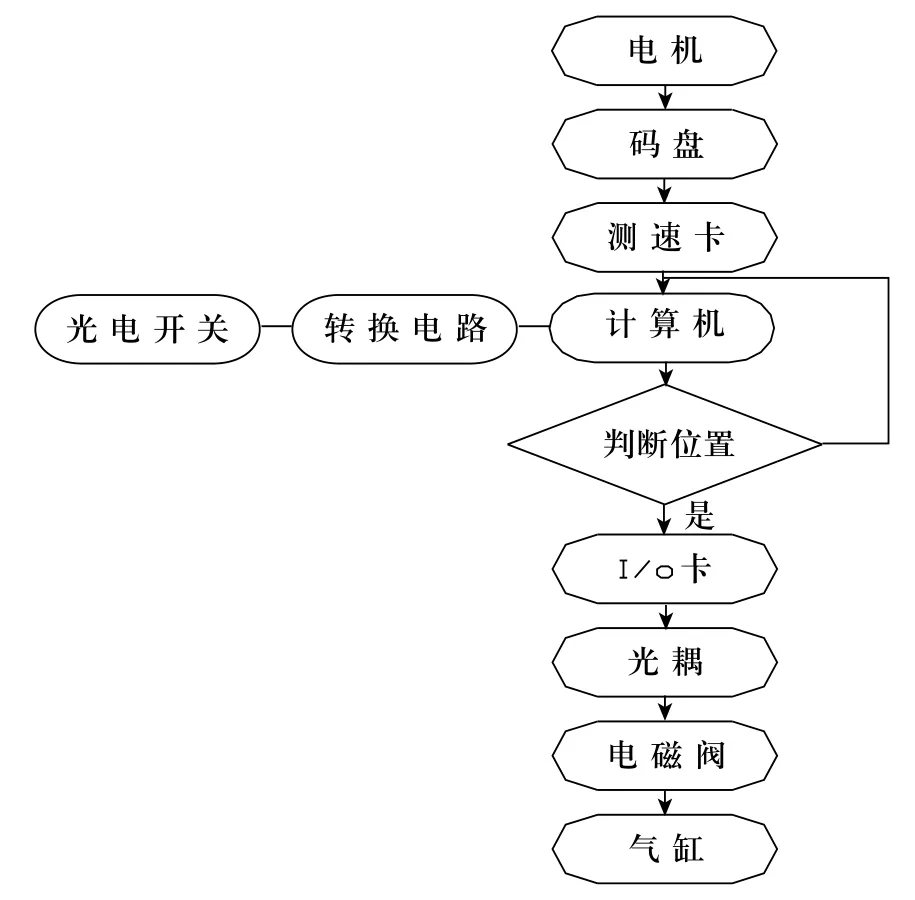
圖1 探頭起落控制工藝過(guò)程圖
1 探頭起落控制工藝過(guò)程分析
在實(shí)際應(yīng)用中,判斷鋼管是否進(jìn)入探傷區(qū)是由對(duì)射式光電開關(guān)所控制,對(duì)射式光電開關(guān)在通斷的情況下分別有有+24v與0v兩個(gè)電壓值,通過(guò)轉(zhuǎn)換電路的作用,轉(zhuǎn)換為+5v與0v兩個(gè)電壓值,當(dāng)鋼管進(jìn)入探傷區(qū)后遮住光電傳感器,接收端不能得到光信號(hào),計(jì)算機(jī)就得到一個(gè)低電平,反之計(jì)算機(jī)就得到一個(gè)高電平。經(jīng)過(guò)這樣的判斷,可以確認(rèn)鋼管是否運(yùn)行在探傷區(qū),一旦鋼管進(jìn)入探傷區(qū),通過(guò)監(jiān)測(cè)行車的水平速度,不斷的判斷探頭架上各組探頭當(dāng)前的運(yùn)行位置,并根據(jù)各組探頭與光電開關(guān)的實(shí)際距離,分別給出各組探頭的落信號(hào),控制探頭的落動(dòng)作。當(dāng)鋼管離開探傷區(qū)時(shí),光電開關(guān)的接收斷得到光信號(hào),同時(shí)計(jì)算機(jī)檢測(cè)各組探頭與光電開關(guān)的位置,并根據(jù)各組探頭與光電開關(guān)的實(shí)際距離,分別給出各組探頭的起信號(hào),控制探頭的起動(dòng)作。由于探頭的起落過(guò)程中,針對(duì)每組探頭,相差一個(gè)探頭體的距離,因此,探頭的起落控制距離是不一致的,所以要求在實(shí)際的應(yīng)用中,分別給出各組探頭的起落距離,如圖2所示。
行車帶動(dòng)探頭架的運(yùn)動(dòng)過(guò)程中,每組探頭的起落位置的檢測(cè)是由光電增量碼盤來(lái)實(shí)現(xiàn)的,計(jì)算機(jī)在每個(gè)檢測(cè)周期T=50ms內(nèi),就可以得到當(dāng)前時(shí)間段內(nèi)的行車運(yùn)行距離ΔLi( 測(cè)速卡每讀一次清零),則總的運(yùn)行距離L為:
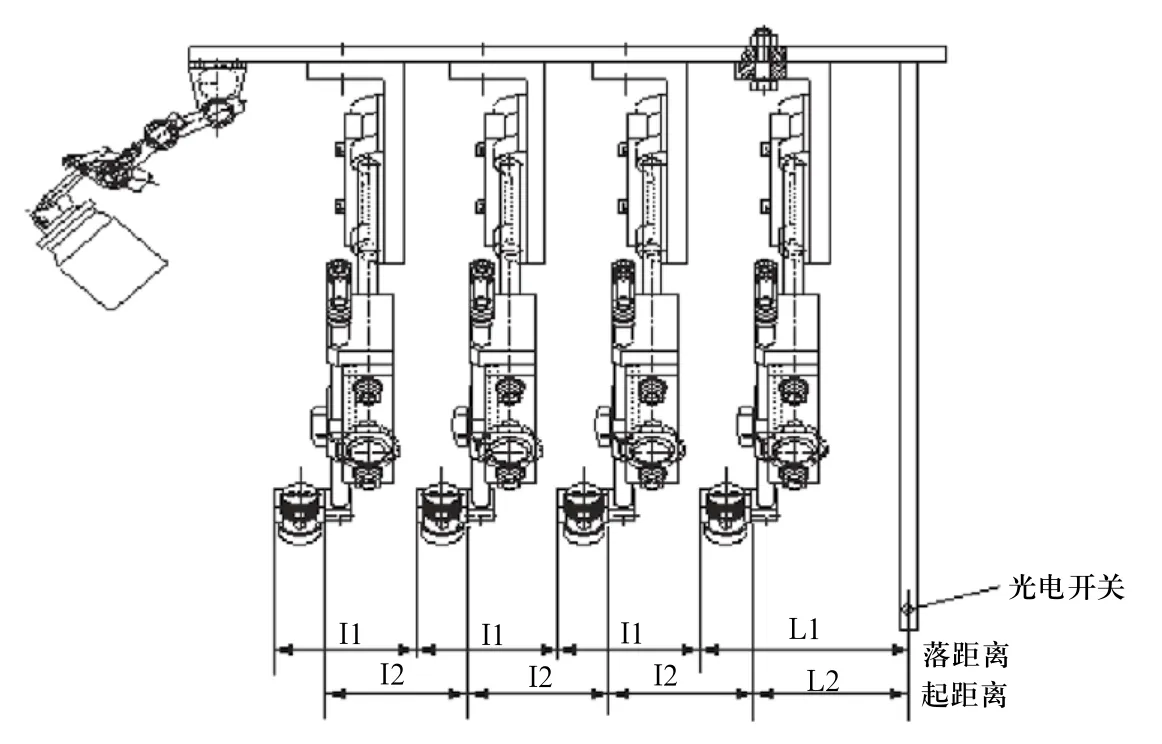
圖2 探頭起落位置示意圖
計(jì)算機(jī)每次檢測(cè)周期固定,為T=50ms,當(dāng)計(jì)算機(jī)通過(guò)接口得到當(dāng)前時(shí)刻行車的運(yùn)行位移時(shí),也可得到行車的運(yùn)行速度Vi, 為以后的螺距控制提供依據(jù)。
根據(jù)光電開關(guān)提供的檢測(cè)信息,不斷判斷L的距離,根據(jù)起落位置的不同要求,分別實(shí)現(xiàn)對(duì)各組探頭的起落控制。
2 控制程序設(shè)計(jì)
計(jì)算機(jī)在進(jìn)行信號(hào)采集之后,為了避免干擾,一般都進(jìn)行相應(yīng)的數(shù)字濾波預(yù)處理。預(yù)處理的主要任務(wù)是去除混雜在有用信號(hào)中的各種干擾信號(hào),在設(shè)計(jì)中采用滑動(dòng)平均濾波法。該方法采用循環(huán)隊(duì)列作為采樣數(shù)據(jù)存儲(chǔ)器,隊(duì)列長(zhǎng)度為n,每進(jìn)行一次新的采樣,把采樣數(shù)據(jù)放到隊(duì)尾,扔掉原來(lái)隊(duì)首的一個(gè)數(shù)據(jù)。這樣,在隊(duì)列中始終有n個(gè)最新的數(shù)據(jù)。對(duì)這n個(gè)最新數(shù)據(jù)求取平均值,作為此次采樣的有效數(shù)據(jù)。這種方法每采樣一次,便得到一個(gè)有效采樣值,因而速度快,實(shí)時(shí)性好,對(duì)周期性干擾有良好的抑制作用。滑動(dòng)平均濾波的流程圖如圖3所示:
在實(shí)際應(yīng)用中,取n=3,數(shù)據(jù)經(jīng)過(guò)處理后,得到相應(yīng)的行車運(yùn)行速度,依據(jù)前面的分析,進(jìn)行探頭起落控制的程序流程圖如圖4所示:
本程序使用VC++6.0開發(fā),部分程序及說(shuō)明如下:
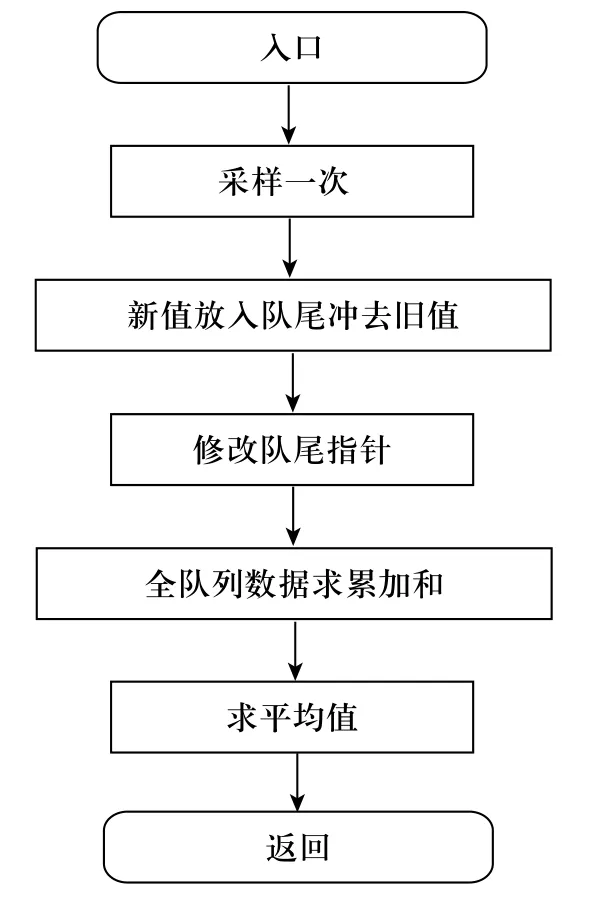
圖3 滑動(dòng)平均濾波流程圖
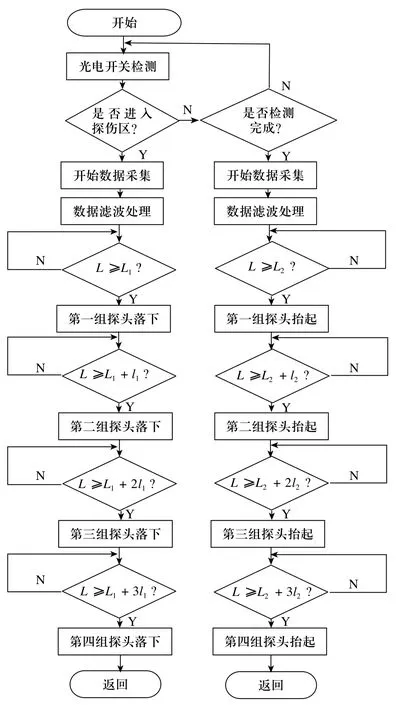
圖4 探頭起落控制的程序流程圖



3 結(jié)束語(yǔ)
針對(duì)探頭的起落控制進(jìn)行了分析,使掃描盲區(qū)在50mm能夠很好的實(shí)現(xiàn),但在實(shí)際的應(yīng)用中,為了進(jìn)一步減少其掃描盲區(qū),必須考慮影響其起落位置的因素,主要有:
1)由于探頭的起落靠氣缸來(lái)執(zhí)行,執(zhí)行元件在得到起落信號(hào)后會(huì)有一個(gè)時(shí)間的延遲(0.2~0.4s,因探頭與鋼管的距離的不同而不同);
2)行車在運(yùn)行中與軌道的打滑現(xiàn)象也對(duì)位置精度產(chǎn)生影響;
3)計(jì)算機(jī)的檢測(cè)時(shí)間對(duì)位置精度的影響。
因此,為了更好的實(shí)現(xiàn)探頭的起落控制,根據(jù)不同的現(xiàn)場(chǎng)情況,可適當(dāng)?shù)恼{(diào)整水平行車的滑移系數(shù);在計(jì)算速度允許的情況下盡量縮短檢測(cè)時(shí)間;在計(jì)算中充分考慮探頭的起落時(shí)間。這樣,能在原有的基礎(chǔ)上能夠進(jìn)一步縮小檢測(cè)盲區(qū)。
[1]王仲生, 無(wú)損檢測(cè)診斷現(xiàn)場(chǎng)實(shí)用技術(shù), 2002.
[2]譚浩強(qiáng),C程序設(shè)計(jì)[M]. 清華大學(xué)出版社, 2003.
[3]向世明.Visual C++數(shù)字圖象與圖形處理[M]. 電子工業(yè)出版社, 2001.
[4]喬林,楊志剛.Visual C++數(shù)字圖象與圖形處理[M]. 中國(guó)鐵道出版社, 1999.
Probe lifting control research based on seamless ultrasonic test
ZHANG Wen-jie, WANG Zuo
由于無(wú)縫管的廣泛應(yīng)用,對(duì)于無(wú)縫管自動(dòng)超聲檢測(cè)的要求越來(lái)越高,而探頭的自動(dòng)起落是自動(dòng)化探傷中的重要問題之一。為了保證每個(gè)探頭能夠進(jìn)行有效范圍的檢測(cè),減少其掃描盲區(qū),設(shè)計(jì)考慮到執(zhí)行元件得到起落信號(hào)的延遲、行車在運(yùn)行中與軌道的打滑現(xiàn)象及計(jì)算機(jī)的檢測(cè)時(shí)間對(duì)位置精度的影響等多種因素對(duì)其的影響并在程序中對(duì)其加以解決。
無(wú)縫管;探頭;超聲檢測(cè);起落
張文潔(1963-),女,遼寧鞍山人,副教授,碩士,主要從事機(jī)械電子、數(shù)控加工等方面的研究工作。
TP273
B
1009-0134(2011)1(上)-0015-04
10.3969/j.issn.1009-0134.2011.1(上).04
2010-07-21
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
小學(xué)科學(xué)(學(xué)生版)(2021年7期)2021-07-28 06:44:42
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
科技傳播(2019年22期)2020-01-14 03:06:34
電子制作(2018年11期)2018-08-04 03:25:42
消費(fèi)導(dǎo)刊(2017年20期)2018-01-03 06:26:40
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
