岔管供水不穩定分析與處理
2011-05-16 09:08:42邵彬
水電站機電技術 2011年2期
邵彬
(烏魯瓦提水力發電廠,新疆 和田 848000)
岔管供水不穩定分析與處理
邵彬
(烏魯瓦提水力發電廠,新疆 和田 848000)
通過對烏魯瓦提水電廠的岔管供水方式進行介紹,同時對岔管供水的壓力波動和引起的頻率波動進行分析,采用選擇機組的運行工況、調速器的運行方式、改進調節算法等方法抑制岔管供水對調速器調節所帶來的影響,使機組在孤網下運行得以穩定。
岔管;孤網;調速器;參數;算法
0 引言
烏魯瓦提水電廠位于新疆和田喀拉喀什河中游,為壩后式電站,安裝有4臺15MW立軸混流式水輪發電機組,設計水頭78m,水庫多年平均水頭102m,4臺機組共用一根壓力鋼管,為非對稱Y型岔管方式[1],如圖1引水岔管示意圖所示。調速器為武漢三聯水電控制公司生產的BWT-80型PLC步進式調速器。于2000年投入運行,在2007年以前和田地區電網為孤立小電網,總容量約為100MW。烏魯瓦提水電廠作為第一調頻廠,一直以來擔負著地區電網的調峰調頻任務。由于電網較小,頻率容易波動,只要波動稍稍較大就會引起電網頻率在45Hz~52HZ之間來回振蕩,導致低頻減載裝置頻繁動作,給地區電網的運行安全帶來極大的隱患,供電質量嚴重低下,嚴重影響電網和機組的安全運行。
1 壓力波動分析
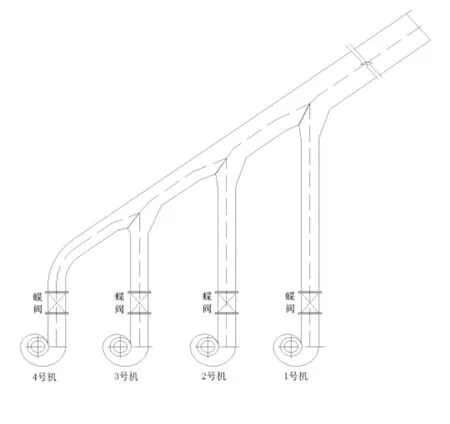
圖1 引水岔管示意圖
烏魯瓦提水電廠裝機容量占據了全網的60%份額,且作為第一調頻廠,其頻率控制不穩定,將會導致全網頻率變化范圍不合格。為了保證調頻的速動性,四臺機組運行中都處于孤網轉速調節狀態。調速器參數給定也較為靈敏,如表1所示。
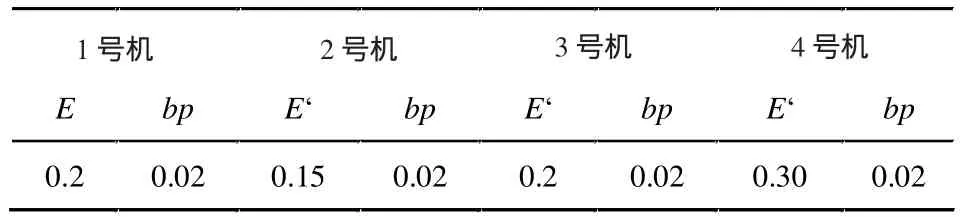
表1 調速器參數配置表
要分析其壓力波動原因,必須首先對水流進行分析。對于均質水管中水擊壓力波傳播速度可按下式計算:

式中:E0為水的彈性系數,一般為2.1×105N/cm2;E為管壁材料的彈性系數,該處E=2.1×105N/cm2,D為管道直徑,該處支管220cm,主管503cm。δ為管壁厚度,a0為聲波在水中的傳播速度,一般為1435m/s。一般電站鋼管的 D/δ=50~200,多數情況下100左右,所以波速a通常在1000m/s左右[2]。水庫取水口到第一岔管段距離L=422m。
當機組負載改變時,機組轉速將發生變化,調速器動作,導葉開度發生變化,引起管道系統的水力瞬變,管壁所產生的水擊波從蝸殼處一方面經過L/a=422m/1000m/s=0.422s到達水庫,因水庫很大,庫水位不會因水擊影響而變化,故取水口壓力始終保持不變,于是水擊波在取水口處以同樣的數值發生反射,經過2L/a=0.844s返回到本機蝸殼處,同時反射到其他三臺機組蝸殼處。另一方面水擊波直接經過L/a=0.07s~0.05s到達相鄰機組。這樣直接和間接水擊引起相鄰機組負荷發生大幅度變化。加上前面所述,調速器參數較為靈敏,爭相調整頻率,再次造成大的水擊,如此反復,惡性循環下去,導致4臺導葉接力器來回抽動,頻率處于大幅度振蕩狀態。
因此,可以總結出由于4臺機組具有共同的壓力引水總管即岔管供水,當鄰近機組擾動調節,使水流產生較大的波動時,則此臺機組蝸殼內的水壓也相應產生波動,此波動值對低水頭來說就是一較大的相對變化量[3];對此機組轉輪而言,則是大幅度的水壓波動值。此大波動就迫使穩定運行的機組改變轉速,此調速器就產生自動調節使之穩定,并非是調速器本身的故障。為了證實此判斷的正確性,我們又特將這臺穩定運行的手動運行進行觀察,當鄰近機組不擾動時,該機組轉速在穩定范圍之內;如鄰近機組擾動時,則中間機組轉速器就產生較大波動。
2 處理措施
通過上述分析,認為岔管下機組相互間干擾引起壓力波動,導致頻率波動和振蕩,為了減輕這種干擾,可以通過改變壓力鋼管共用方式,采用單機單供方式徹底解決壓力干擾問題,但這與實際不相符,也不現實,但可以通過以下幾種方式進行抑制:
2.1 合理選擇機組的運行工況
機組運行在大網下,調速器一般處于功率調節或者開度調節狀態,而在孤網下時,調速器處于轉速調節狀態,但經過現場的實際觀察,發現該調速器大網轉孤網時間較長為40s,也就是說調速器在大網下判斷頻率下降或升高超過頻率死區40s才進行調節。而在孤網下,40s也就意味著頻率下降到很大數值,因此,此時再進行調整將會導致頻率偏差極大,引起超調現象,而超調就可能引起壓力波動較大。因此,合理的選擇大網轉孤網時間,將會使調速器處于合適的運行工況下運行,對調速器程序中將該時間改為5s。
2.2 合理選擇調速器參數
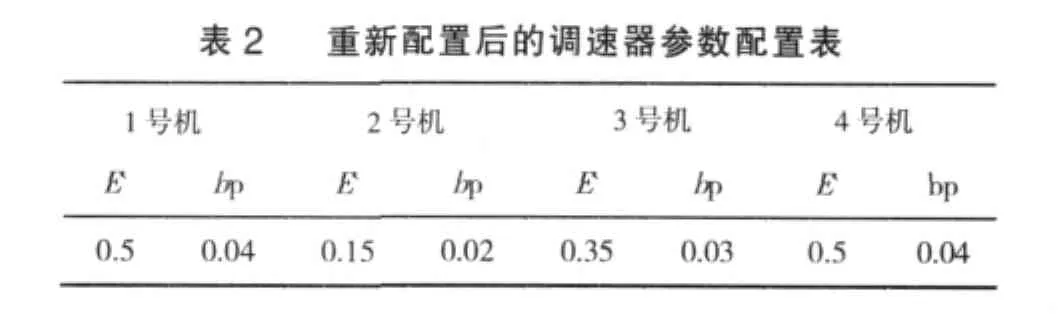
原有調速器參數選擇如表1所示,4臺機組頻率人工死區設置均相差不大,而在地區孤網中,一般頻率變化范圍較大,處于±0.5Hz范圍,當遇有大負荷投退時將遠遠超過該值,且bP值一致,無法形成全廠機組的有差調節,一旦頻率波動較大時,將會輕易引起4臺調速器共同調節,導致調節力度過大而產生超調現象,因此,需要重新對參數進行選擇,使各機組形成有差調節,呈階梯調節方式,也就是當頻率較小變動時,由一臺機組或兩臺機組擔任調節任務,其他幾臺機組待命,逐漸減小頻率的波動范圍,即使遇有大波動的情況下,4臺機組同時調節,由于合理設置了永態轉差系數bp,使調節力度不至于過度。見表2。
?
2.3 改進調節算法
調速器采用增量式PID調節規律,其算法表達式如下:

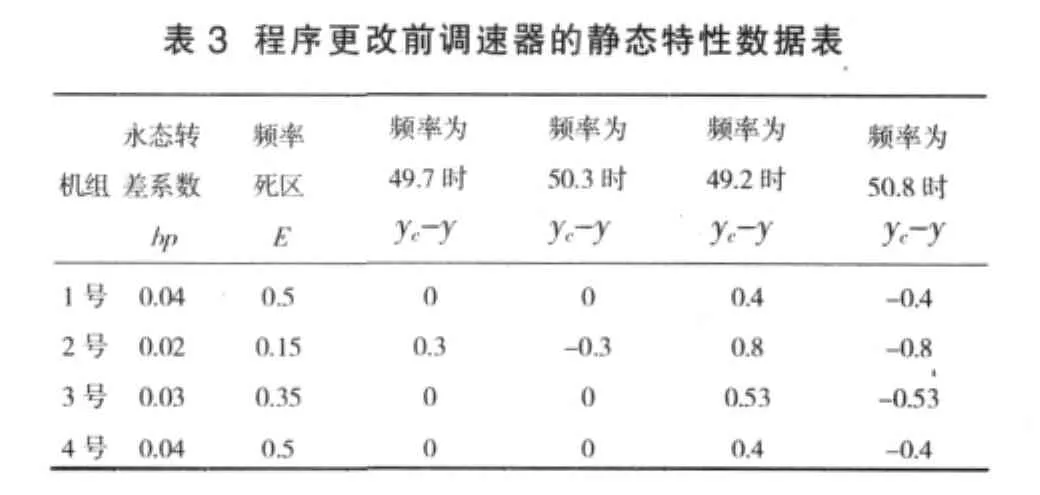
由式可見其 PID調節中與頻差△f(i)有著重要的聯系,機組靜態穩定狀態下的等效表達式yc-y=(fc-fg)/50bp[5],式中:fc為頻率給定,單位是 Hz;fg為機組頻率,單位是Hz;bp永態轉差系數;y為導葉接力器相對值,值范圍0~1;y為導葉接力器開度給定相對值,取值范圍0~1。根據表達式可模擬頻率在4種情況下即50±0.3和50±0.8變動下調速器的靜態特性數據見表3。
?
由表3可以看出,在電網或機組頻率超出頻率人工死區后,調速器將會參與調節,其開度與超出頻率死區的頻差成正比,電網頻率發生小波動時,一臺或兩臺調速器以較小的調節力度調節頻率,可以保證頻率在正常范圍之內。當電網突然發生大負荷投退或切除時,對于孤網運行的機組來說,頻率將會發生大幅度變化,導致更多機組參與調節,造成超調的現象,同時由于岔管的原因,使調節品質更加惡化。為了保證多臺機組調節的情況下不發生頻率變動較大的現象,對調節規律進行修改,將PID中計算的頻差減去頻率死區,這樣就可以減少其調節力度,即△f(i)=△f(i)-E。
具體做法是在原調速器PLC負載子程序中增加一段程序:當調速器為負載運行狀態時,且為開度調節或功率調節狀態(頻率調節狀態時不執行該段程序),首先判斷頻差是否大于頻率死區,若大于,則△f(i)=△f(i)-E,反之則△f(i)=0。 見圖 3。
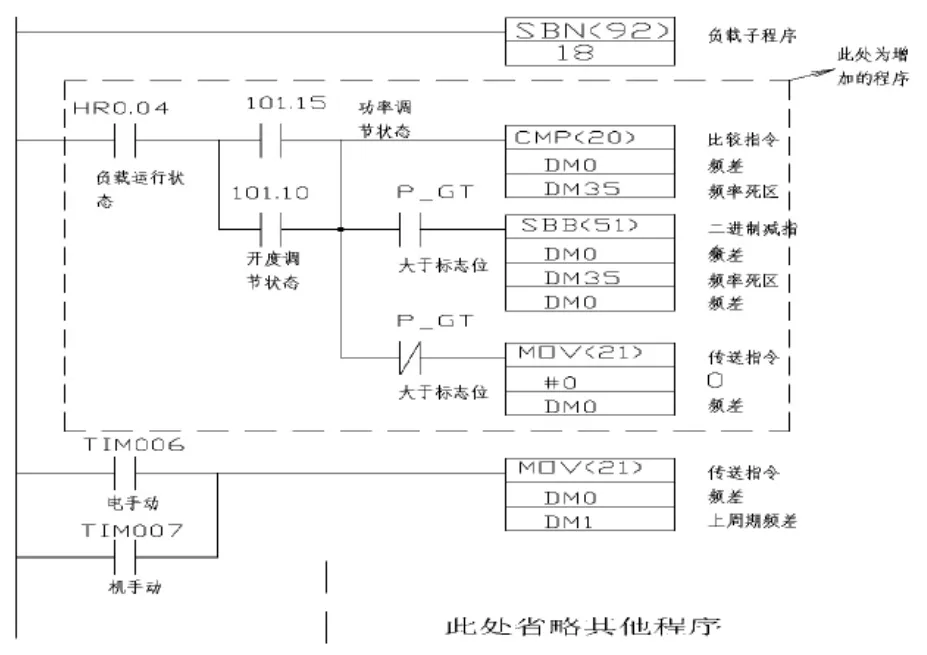
圖3 調速器PLC梯形修改圖
根據新的算法,仍然按照原來模擬頻率得到開度變化數據,見表4。從表中數據可以看出,在同樣的頻率變動范圍之下,更改程序后的開度變化范圍明顯比未修改前的小,這就可以減小機組在孤網運行狀態下四臺機組同時調節的超調量。

?
3 結束語
烏魯瓦提水電廠通過對岔管水力情況的分析,找到了孤網狀態下調節不穩定的根本原因,通過對調速器工況轉換的調整,參數的修改、調節算法的改進,解決了困擾多年孤網狀態下調節不穩定的問題,為地區電網的安全穩定運行提供了有力的保證。
[1]陳可一.水電站概論[M].北京:水利電力出版社,1996.8-9.
[2]劉玉祥,許維忠.高水頭電站引水管壓力波動分析與調節[J].水電自動化與大壩監測,2008,32(6):26-27.
[3]李永國.調速器的調試與故障處理[M].南京:河海大學出版社,1999.94-96.
[4]魏守平.現代水輪機調節技術[M].武漢:華中理工大學出版社,2002.
[5]魏守平.水輪機調節[M].武漢:華中理工大學出版社,2009.
TV732.4+3
B
1672-5387(2011)02-0061-03
2010-10-11
邵彬(1982-),助理工程師,從事水電站生產技術管理工作。
