六相永磁同步電機串聯系統控制的兩種方法分析研究
2011-05-21 00:42:22孫美美張樹團
電子設計工程 2011年13期
關鍵詞:系統
魯 芳,孫美美,張樹團
(海軍航空工程學院 山東 煙臺 264001)
由于多相電機較普通三相電機有很多優點[1],在過去30年中,多相電機驅動的研究興趣最近一直是穩步上升,而技術性能優良的多電飛機或全電飛機以及綜合電力系統艦船,需要解決同一直流母線電源下的多臺多相電機驅動系統中各電機能同時獨立運行的問題。所以采用一臺逆變器同時驅動不同電壓額定值或不同轉速或負載條件下的多臺多相電機串聯系統應運而生。本文以兩臺雙Y移30°永磁同步電機串聯系統為例,采用電流滯環控制和PWM載波控制兩種控制策略,并在Matlab/Simulink環境下對系統進行建模仿真,驗證分析系統的可行性,比較兩種控制的不同。
1 兩臺雙Y移30°PMSM串聯系統
多相電機是一個多變量強耦合的非線性系統,根據機電能量建立的多相電機原始微分方程非常復雜,分析起來十分困難,選擇適當的空間變換,能使方程簡化。從矩陣分析的角度,六相電機的電感矩陣是一個循環矩陣,可以通過矩陣變換實現電感矩陣的對角化,消除相繞組之間的強耦合。
在對雙Y移30°六相電機的解耦研究中,通常引入廣義兩軸正交變換T將六相電壓和電流空間矢量投影到3個相互正交的兩維子平面α-β、x-y和o1-o2中去。其中,自然坐標系下的電壓和電流的基波和6k±1(k為偶數)次諧波投影到 α-β平面,6k±1(k為奇數)次諧波投影到 x-y平面,零次和3k次諧波投影到o1-o2平面。雙Y移30°的電機的兩相實變換矩陣[T]為[2]:

經過廣義兩軸正交變換后的定子電壓方程中含有轉子的旋轉角 θr,需要使用旋轉變換[R]消去 θr,得到靜止坐標系下的模型。旋轉變換矩陣[R]形式為:

根據多相電路坐標變化的一般理論,由逆變器輸出的六相電流經過空間變換矩陣變換后,投影到3個正交的子空間中(α-β平面、x-y平面和 o1-o2平面),在 α-β平面和 x-y平面的電流分量可以產生獨立控制的磁動勢。根據雙Y移30°電機的解耦方式,兩臺雙Y移30°電機串聯系統與逆變器連接如圖1所示。
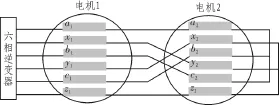
圖1 兩臺雙Y移30°PMSM串聯Fig.1 Two dual-Y shifted by 30°PMSM in series
2 電流滯環控制
串聯驅動系統由一臺逆變器來供電,要求逆變器的輸出電流可以任意控制,因此一般采用電流可控電壓源逆變器,此時的電流控制環節位于自然坐標系中,控制的是實際的六相電流[iA,iB,iC,iD,iE,iF]T,對電流的控制模式多采用滯環比較控制。
對逆變器A相電流的滯環控制如圖2所示,滯環比較器的滯環寬度為2h=2ΔiAmax,其中ΔiAmax是設定的最大電流偏差。A相電流參考值與實際值iA比較產生了電流偏差ΔiA(ΔiA=-iA)。當實際相電流iA超過給定電流,且偏差達到ΔiAmax時,滯環比較器的輸出使A相上橋臂關斷,經保持電路必要的保護延遲后,下橋臂導通,結果把A相繞組首端由高電位切換至低電位,因而電流開始下降。當實際相電流iA降低到比給定電流低ΔiAmax時,滯環比較的輸出使A相下橋臂關斷,上橋臂導通,電流再上升。由此上、下兩個電子開關反復通斷,迫使實際電流在滯環寬度2h內呈鋸齒狀不斷跟蹤給定電流的波形,于是通過調節滯環寬度可以有效地控制A相電流的偏差。滯環寬度直接影響電流的跟蹤性能:寬度過寬時,開關頻率低,跟蹤誤差大;寬度過窄時,跟蹤誤差小,但是開關頻率過高,開關損耗增大。
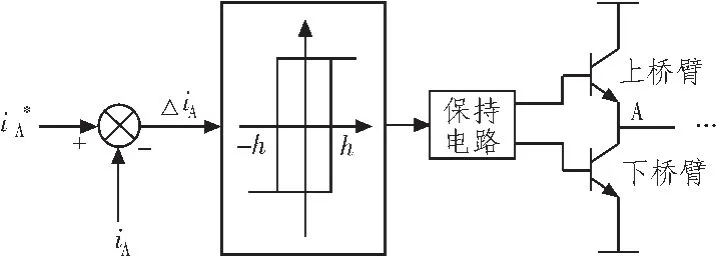
圖2 逆變器相電流滯環控制Fig.2 Hysteresis current control of inverter
滯環比較器和電壓源逆變器構成了快速電流控制環,相當于一個高增益的P調節器。此時的逆變器已成為電流可控PWM逆變器,能夠將電流強迫輸入電動機。這種控制方式使實際電流能夠快速跟蹤參考電流,提高了系統的響應速度。
此外,電流的調制和控制策略還有斜坡比較控制和預測電流控制。與滯環控制相比,斜坡電流控制的優點是開關頻率可以預置,因此不會超過逆變器的開關能力,但比滯環控制要復雜些;預測電流控制就是根據預測的電流變化軌跡來確定期望的定子電壓矢量,再使逆變器提供的實際電壓矢量與預期的定子電壓矢量相等。無論采用何種方法,最終目的是使實際電流能夠更好和快速地跟蹤指令電流,盡量降低開關頻率,且從軟硬件上容易實現,又有較低的成本。
3 串聯系統的工作原理
基于id=0的矢量控制策略和載波調制PWM技術的兩臺雙Y移30°PMSM串聯系統控制系統如圖3所示。
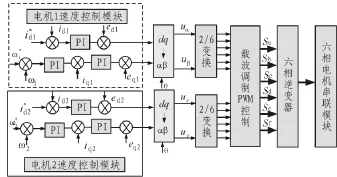
圖3 兩臺雙Y移30°永磁同步電動機串聯控制技術Fig.3 Two pairs of Y shift ed by 30°control of permanent magnet synchronous motor series
圖3中的id,iq,ω,θ都是六相電機串聯系統的反饋值。通過電流傳感器檢測六相逆變器的六相輸出電流(該電流實際上包含了兩臺六相永磁同步電機的定子繞組電流瞬時值之和),然后經過式(1)和(2)的變換矩陣計算變換后分別得到控制電機1的αβ電流分量和控制電機2的xy分量;根據計算得到各電機的位置信號θ,一方面用來進行靜止坐標到旋轉坐標的變換,分別將電機1的αβ電流分量轉變為同步旋轉坐標下的電流分量id1,iq1,同理得電機2的電流分量 id2,iq2;位置信號的另一方面用來進行微分得到轉速的大小ω[3-4]。
將閉環控制所得到的電壓信號分別進行旋轉坐標到靜止坐標的變換,然后把得到的參考電壓經2/6變換,得到每臺電機每相的參考電壓按照一定的串聯相序關系分別相加,得到逆變器輸出端的參考電壓:再經 PWM 技術輸出的 6 路控制信號(SA與 S′A、SB與 S′B、SC與 S′C、SX與 S′X、SY與 S′Y、SZ與 S′Z)分別控制六相逆變器的六個橋臂的上下兩個開關器件的導通與關斷。
電機1和電機2補償電壓分別為:

為了使單位定子電流的力矩最大,或者在產生所要求的力矩情況下,只需最小的定子電流,因此采用最簡單的定子激磁電流分量id=0的控制策略[5]。
4 串聯驅動系統的仿真分析
串聯系統包括電機串聯模塊、速度調節模塊、坐標變換模塊、逆變器模塊等。對系統仿真參數設定如下:直流電壓Vdc=300 V, 電機參數 R=rs1+rs2=2.875 Ω,L1=8.5 mH,L2=12 mH,ψf1=0.175 Wb,ψf2=0.2 Wb,p1=p2=4,運動參數 J1=0.089 kg·m2,J2=0.1 kg·m2,F1=0.005,F2=0.01。
對串聯驅動系統的變速運行情況進行仿真分析。電機1運行在240 r/m,電機2運行在200 r/m,0.5 s時刻電機2加速到350 r/m的仿真波形如圖4、圖5所示。
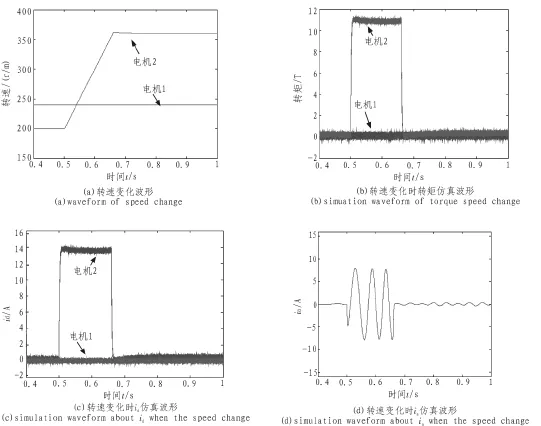
圖4 串聯系統在電流滯環控制下的波形Fig.4 Hysteresis series system under the control of the current waveform

圖5 串聯系統在PWM控制下的波形Fig.5 Series system under the control of the PWM waveform
從仿真波形可以看出:兩種控制方式對電機轉速的控制都能達到預期效果。電流滯環控制的優點是相電流的波動較小,即對電流的利用率較高,適合高功率電機串聯的控制;而PWM控制的優點是轉矩的波動較小,適合精度較高的電機串聯控制,但是,電流利用率不高。
5 結束語
筆者闡述了兩臺雙Y移30°PMSM的串聯系統的工作原理,采用電流滯環控制和載波調制PWM控制。在Simulink環境下建立了該串聯系統的仿真模型。仿真結果表明:兩種控制方式都能很好地控制電機的串聯系統,而且各有優缺點。以此為基礎,可以對多相電機串聯系統進行更深入的研究[6]。
[1]侯立軍,蘇彥民,陳林,等.多相感應電機調速系統研究、綜述[J].機床與液壓,2004(4):8-12.HOU Li-jun,SU Yan-min,CHEN Lin,et al.Multi-phase induction machine drive research-a survey[J].Machine Tool&Hydraulics,2004(4):8-12.
[2]陳林.感應電機空間電壓矢量選擇與控制研究 [D].武漢:華中科技大學,2003.
[3]Levi E,Jones M,Vukosavic S N,et al.A novel concept of a multiphase,multi-motor vector controlled drive system supplied from a single voltage source inverter[J].IEEE Trans actions on Power Elect ronivs.2004,19(2):320-335.
[4]Levi E.Multiphase electric machines for variable-speed applications[J].IEEE Trans.on Industrial Electronics,2008,55(5):1893-1909.
[5]王成元,夏家寬,孫宜標.現代電機控制技術[M].北京:機械工業出版社,2009.
[6]崔納新,張承慧,孫豐濤.異步電動機的效率優化快速響應控制研究 [J].中國電機工程學報,2005,25 (11):118-123.CUI Na-xin,ZHANG Cheng-hui,SUN Feng-tao.Study on efficiency optimization and high response control of induction motor[J].Journal of Chinese Electrical Engineering Science,2005,25(11):118-123.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
