大型風(fēng)機(jī)變槳距控制系統(tǒng)的研究*
2011-06-02 09:55:26竇真蘭程孟增凌志斌
電機(jī)與控制應(yīng)用 2011年3期
關(guān)鍵詞:系統(tǒng)
竇真蘭, 程孟增, 蔡 旭,2, 凌志斌
(1.上海交通大學(xué)電子信息與電氣工程學(xué)院,風(fēng)力發(fā)電研究中心,電力傳輸與功率變換控制教育部重點(diǎn)實(shí)驗(yàn)室,上海 200240;2.上海交通大學(xué)船舶海洋與建筑工程學(xué)院,海洋工程國家重點(diǎn)實(shí)驗(yàn)室,上海 200240)
0 引言
目前世界上投入使用的風(fēng)電機(jī)組變槳距系統(tǒng)主要有兩種方案:液壓變槳距系統(tǒng)和電動(dòng)變槳距系統(tǒng)。本文分析了大型風(fēng)力機(jī)的變槳距緣由,針對(duì)這兩種變槳距控制,從系統(tǒng)總體結(jié)構(gòu)、執(zhí)行機(jī)構(gòu)的結(jié)構(gòu)原理、變槳系統(tǒng)控制、控制器設(shè)計(jì)等方面進(jìn)行研究,并分別利用SimHydraulics和Simulink仿真建模,不僅直觀反映變槳距系統(tǒng)的動(dòng)態(tài)特性,為大型風(fēng)電機(jī)組的全工況仿真奠定基礎(chǔ),而且變槳系統(tǒng)的控制器設(shè)計(jì),為實(shí)際風(fēng)場(chǎng)中變槳控制提供理論支持,為大型風(fēng)電機(jī)組的研制提供理論保證。
1 大型風(fēng)機(jī)的變槳距控制
根據(jù)風(fēng)力機(jī)的空氣動(dòng)力學(xué)特性[3],風(fēng)力機(jī)的輸出機(jī)械功率為

式中:ρ——空氣密度;
R——風(fēng)力機(jī)葉片的半徑;
v——風(fēng)速;
β、λ——槳距角,葉尖速比;
Cp——風(fēng)能利用系數(shù),其理論極限為0.593。

風(fēng)力機(jī)的功率特性可由一簇功率系數(shù)Cp性能曲線來表示,如圖1所示,則Cp的變化規(guī)律與槳距角和葉尖速比的關(guān)系如下:
(1)若給定β,Cp存在唯一的最大值Cpmax。
(2)若給定 λ,當(dāng)β=0°時(shí),Cp相對(duì)最大;隨著β增大,Cp則明顯減小。

圖1 變槳距風(fēng)能利用系數(shù)曲線
理論上,風(fēng)力機(jī)輸出功率是風(fēng)速的立方函數(shù),隨著風(fēng)速的增加,其輸出功率是無限的。但實(shí)際的變速風(fēng)力發(fā)電機(jī)組受到兩個(gè)基本條件限制:(1)所有電路及電力電子器件受功率限制;(2)所有旋轉(zhuǎn)部件的機(jī)械強(qiáng)度受轉(zhuǎn)速限制,所以風(fēng)力機(jī)的轉(zhuǎn)速和輸出功率是有限度的,超過限度,風(fēng)力發(fā)電機(jī)組的某些部分便不能正常工作[1-3]。當(dāng)風(fēng)速超過額定風(fēng)速時(shí),利用變槳控制系統(tǒng)增大β,降低Cp,控制風(fēng)輪捕獲功率,保持風(fēng)力機(jī)輸出功率穩(wěn)定在額定功率附近。根據(jù)變槳執(zhí)行機(jī)構(gòu)不同,變槳距系統(tǒng)可分為:液壓變槳距系統(tǒng)和電動(dòng)變槳距系統(tǒng)。
2 液壓變槳距系統(tǒng)
液壓變槳系統(tǒng)根據(jù)給定的槳距角,利用一套曲柄連桿機(jī)構(gòu)同步驅(qū)動(dòng)或者由3個(gè)液壓缸分別推動(dòng)槳葉轉(zhuǎn)動(dòng),調(diào)節(jié)槳距角,優(yōu)點(diǎn)是對(duì)于大慣性負(fù)載具有頻率響應(yīng)快、扭矩大,實(shí)現(xiàn)無級(jí)調(diào)速,便于集中控制和集成化等優(yōu)點(diǎn),目前在中國商業(yè)機(jī)組中占有重要的地位,國外Vestas、Gamesa和EHN等公司的風(fēng)機(jī)也采用液壓變槳技術(shù)。缺點(diǎn)是其傳動(dòng)結(jié)構(gòu)相對(duì)復(fù)雜,漏油、卡澀時(shí)有發(fā)生,且液壓傳動(dòng)部件在夏季和冬季的控制精度差別較大。
2.1 液壓變槳距系統(tǒng)結(jié)構(gòu)
本文分析的液壓變槳距系統(tǒng)采用液壓缸作為原動(dòng)機(jī),通過一套曲柄滑動(dòng)結(jié)構(gòu)同步驅(qū)動(dòng)三個(gè)槳葉變槳距。變槳距機(jī)構(gòu)主要由推動(dòng)桿、支撐桿、導(dǎo)套、防轉(zhuǎn)裝置、同步盤、短轉(zhuǎn)軸、連桿、長轉(zhuǎn)軸、偏心盤、槳葉、法蘭等部件組成。變槳控制系統(tǒng)根據(jù)當(dāng)前風(fēng)速算出槳葉的槳距角調(diào)節(jié)信號(hào),液壓系統(tǒng)根據(jù)指令驅(qū)動(dòng)液壓缸,液壓缸帶動(dòng)推動(dòng)桿、同步盤運(yùn)動(dòng),同步盤通過短轉(zhuǎn)軸、連桿、長轉(zhuǎn)軸推動(dòng)偏心盤轉(zhuǎn)動(dòng),偏心盤帶動(dòng)槳葉進(jìn)行變槳距。
液壓變槳距執(zhí)行機(jī)構(gòu)的槳葉通過機(jī)械連桿機(jī)構(gòu)與液壓缸相連接,槳距角同液壓缸位移成正比。當(dāng)槳距角減小時(shí),液壓缸活塞桿向右移動(dòng),有桿腔進(jìn)油;當(dāng)槳距角增大時(shí),活塞桿向左移動(dòng),無桿腔進(jìn)油。液壓系統(tǒng)的槳距控制是通過電液比例閥實(shí)現(xiàn)的,電液比例閥的控制電壓與液壓缸的位移變化量成正比,利用油缸設(shè)置的位移傳感器,利用PID調(diào)節(jié)進(jìn)行液壓缸位置閉環(huán)控制。為提高順槳速度,變槳距執(zhí)行系統(tǒng)不僅引入差動(dòng)回路,還利用蓄能器為系統(tǒng)保壓。當(dāng)系統(tǒng)出現(xiàn)故障斷電緊急關(guān)機(jī)時(shí),立即斷開電源,液壓泵緊急關(guān)閉,由蓄能器提供油壓使槳葉順槳。
2.2 液壓變槳距系統(tǒng)控制
液壓變槳距系統(tǒng)的槳距控制如圖2所示,執(zhí)行機(jī)構(gòu)為液壓系統(tǒng)(電液比例閥和液壓缸),槳距控制器根據(jù)槳距角給定與實(shí)際槳距角的差值計(jì)算出電液比例閥的控制電壓(-10~+10 V),通過電液比例閥控制器轉(zhuǎn)換成一定范圍的電流信號(hào),該電流信號(hào)控制比例閥輸出流量的大小和方向。實(shí)際槳距角通過位移傳感器測(cè)量液壓缸活塞的位移信號(hào),利用A/D得到。液壓缸按電液比例閥輸出的方向和流量推動(dòng)變槳機(jī)構(gòu),調(diào)節(jié)槳距角。
液壓變槳距系統(tǒng)是一個(gè)典型的位置控制系統(tǒng),即系統(tǒng)通過控制電液比例輸出閥的壓力實(shí)現(xiàn)對(duì)液壓缸活塞桿位移的控制,所以其控制性能取決于比例閥、液壓缸等元部件的特性及槳距控制器的設(shè)計(jì)。

圖2 變槳距控制框圖
(1)液壓元部件數(shù)學(xué)建模。電液比例閥的閥心運(yùn)動(dòng)方程可表示為

式中:ωn——比例閥液壓頻率;
δv——比例閥阻尼比;
Ka——放大器增益;
Kv——比例閥增益;
u——比例閥輸入電壓。
通過拉氏變換,電液比例閥的傳遞函數(shù)為

在系統(tǒng)工作頻率范圍內(nèi)起主導(dǎo)作用的是動(dòng)力機(jī)構(gòu)環(huán)節(jié),與閥控液壓缸相比,比例閥動(dòng)態(tài)響應(yīng)速度很高,可將其等效為比例環(huán)節(jié)Ka·Kv。
液壓缸的傳遞函數(shù)為
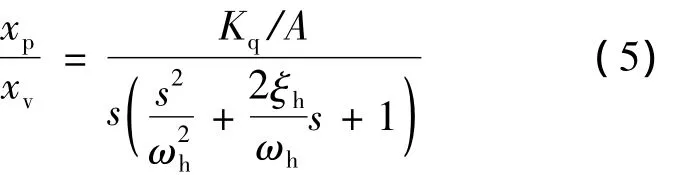
式中:xp——活塞行程;
xv——比例閥閥心位移;
Kq——比例閥的流量增益;
A——活塞有效面積;
ωh——液壓固有頻率;
ξh——液壓阻尼比。
位移傳感器的響應(yīng)速度也遠(yuǎn)遠(yuǎn)高于動(dòng)力機(jī)構(gòu),可將其等效為比例放大環(huán)節(jié),其增益為Kr。
(2)槳距控制器設(shè)計(jì)。變槳控制器采用PID調(diào)節(jié)器,主要是為了提高變槳的響應(yīng)性能,增強(qiáng)位置跟蹤性能,動(dòng)態(tài)結(jié)構(gòu)框圖如圖3所示。
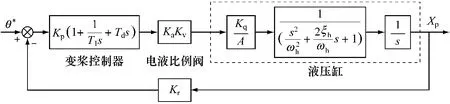
圖3 液壓變槳控制系統(tǒng)動(dòng)態(tài)結(jié)構(gòu)框圖
作為位置跟蹤控制,希望位置的超調(diào)與振蕩很小,故將其校正成典型Ⅰ型系統(tǒng)。經(jīng)設(shè)計(jì),PID調(diào)節(jié)器的參數(shù)Kp遠(yuǎn)大于積分系數(shù)Ki和微分系數(shù)Kd,主要起作用的是Kp,這與液壓系統(tǒng)本身慣性大、工作頻率較低的特點(diǎn)一致。
2.3 液壓變槳距系統(tǒng)仿真
根據(jù)液壓變槳系統(tǒng)執(zhí)行機(jī)構(gòu)原理,利用Sim-Hydraulics搭建液壓變槳系統(tǒng)仿真模型。電液比例閥控制信號(hào),設(shè)置值為0~0.3,與槳距角0°~90°相對(duì)應(yīng),功率調(diào)節(jié)過程中槳距角依次為60°-40°-50°,則給定電液比例閥控制信號(hào)值為0.2-0.133-0.167。換向閥的選擇信號(hào)利用正零值控制,如圖4所示。基本仿真過程為風(fēng)力機(jī)處于順槳位置,第8 s開始功率調(diào)節(jié),第18 s正常關(guān)機(jī),槳葉順槳至90°。

圖4 電液比例閥控制信號(hào)和電磁閥信號(hào)
液壓變槳距控制系統(tǒng)仿真結(jié)果如圖5所示。由圖5(a)分析可知:液壓變槳距閉環(huán)PID系統(tǒng)根據(jù)電液比例閥的輸入信號(hào),定量對(duì)槳距角進(jìn)行準(zhǔn)確控制,比例閥信號(hào)值大小直接決定槳距角大小,其中變槳距速度約15°/s,符合液壓變槳實(shí)際要求。圖5(b)為控制過程中液壓缸活塞位移量與比例閥控制信號(hào)的關(guān)系,給出控制信號(hào)后,經(jīng)過1 s的延遲,即調(diào)節(jié)槳距角至給定位置,誤差很小。相對(duì)于開環(huán)系統(tǒng),閉環(huán)系統(tǒng)更加穩(wěn)定,槳距角跟蹤誤差相對(duì)更小。
3 電動(dòng)變槳距系統(tǒng)
電動(dòng)變槳機(jī)構(gòu)利用伺服電機(jī)帶動(dòng)減速機(jī)的輸出軸小齒輪旋轉(zhuǎn),而小齒輪與回轉(zhuǎn)支承的內(nèi)環(huán)相嚙合,從而帶動(dòng)回轉(zhuǎn)支承的內(nèi)環(huán)與槳葉一起旋轉(zhuǎn),調(diào)節(jié)槳距角,具有快速性、同步性、準(zhǔn)確性等特點(diǎn)。由于結(jié)構(gòu)簡單、緊湊,可充分利用有限空間實(shí)現(xiàn)分散布置,同時(shí)不存在漏油、卡澀等機(jī)械故障,并能實(shí)現(xiàn)對(duì)槳葉的獨(dú)立控制等優(yōu)點(diǎn)。其缺點(diǎn)是電氣布線困難,動(dòng)態(tài)響應(yīng)特性較差。另外電機(jī)本身如果連續(xù)頻繁地調(diào)節(jié)槳葉,將產(chǎn)生過量的熱負(fù)荷使電機(jī)損壞。
3.1 電動(dòng)變槳距系統(tǒng)結(jié)構(gòu)
電動(dòng)變槳距系統(tǒng)由變槳控制器、伺服驅(qū)動(dòng)器和備用電源系統(tǒng)組成,結(jié)構(gòu)如圖6所示。其能夠?qū)崿F(xiàn)3個(gè)槳葉獨(dú)立變槳距,給風(fēng)力發(fā)電機(jī)組提供功率輸出和足夠的剎車制動(dòng)能力,從而避免過載對(duì)風(fēng)機(jī)的破壞。
電動(dòng)變槳距系統(tǒng)的每個(gè)槳葉配有獨(dú)立的執(zhí)行機(jī)構(gòu),執(zhí)行機(jī)構(gòu)的結(jié)構(gòu)原理圖如圖7所示。伺服電機(jī)連接減速箱,通過主動(dòng)齒輪與槳葉輪齒內(nèi)齒圈相連,帶動(dòng)槳葉進(jìn)行轉(zhuǎn)動(dòng),實(shí)現(xiàn)對(duì)槳距角的直接控制。
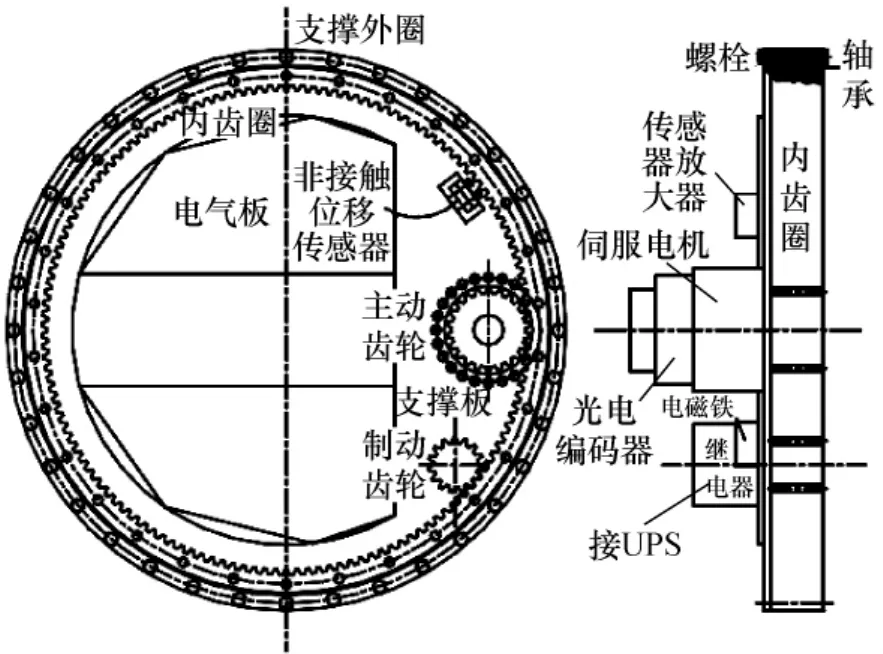
圖7 電動(dòng)變槳矩系統(tǒng)執(zhí)行機(jī)構(gòu)的結(jié)構(gòu)原理圖
如果電動(dòng)變槳距系統(tǒng)出現(xiàn)故障,控制電源斷電,伺服電機(jī)由備用電源系統(tǒng)供電,15 s內(nèi)將槳葉緊急調(diào)節(jié)為順槳位置。在備用電源電量耗盡時(shí),繼電器節(jié)點(diǎn)斷開,原來由電磁力吸合的制動(dòng)齒輪彈出,制動(dòng)槳葉,保持槳葉處于順槳位置。在輪轂內(nèi)齒圈邊上還裝有一個(gè)接近開關(guān),起限位作用。在風(fēng)力機(jī)正常工作時(shí),繼電器上電,電磁鐵吸合制動(dòng)齒輪,不起制動(dòng)作用,使槳葉能夠正常轉(zhuǎn)動(dòng)。
3.2 電動(dòng)變槳距系統(tǒng)控制
電動(dòng)變槳距系統(tǒng)伺服電機(jī)為永磁同步電機(jī)(Permanent Magnet Synchronous Motor,PMSM)。PMSM在d-q坐標(biāo)系下的定子電壓方程為

其中轉(zhuǎn)子磁鏈為
式中:u,i,Rs,Ld——定子電壓、電流、繞組電阻、電感;
下標(biāo) d、q——其 d、q 軸分量;
ωr——轉(zhuǎn)子旋轉(zhuǎn)電角速度;
φf——永磁體對(duì)應(yīng)的轉(zhuǎn)子磁鏈;
p——微分算子。
PMSM的運(yùn)動(dòng)方程為

式中:J——轉(zhuǎn)動(dòng)慣量;
B——衰減系數(shù);
θr——轉(zhuǎn)子位置;
Tl——負(fù)載擾動(dòng)及不確定的擾動(dòng)。
忽略電機(jī)定子繞組損耗和磁場(chǎng)儲(chǔ)能,PMSM的輸出扭矩可表示為

基于轉(zhuǎn)子磁場(chǎng)定向的PMSM矢量控制系統(tǒng),令 id=0,則 Te=3pnφfiq/2,即當(dāng) φf恒定時(shí),定子電流的q軸分量iq代表了電磁轉(zhuǎn)矩Te,通過分別控制id和iq,實(shí)現(xiàn)對(duì)伺服電機(jī)轉(zhuǎn)矩的控制。
考慮到槳葉負(fù)荷的快速波動(dòng)性,電動(dòng)變槳距控制系統(tǒng)要求動(dòng)態(tài)響應(yīng)快、穩(wěn)態(tài)運(yùn)行平穩(wěn),能夠?qū)崿F(xiàn)精確定位和快速跟蹤等,基于轉(zhuǎn)子磁場(chǎng)定向的PMSM矢量控制策略能夠保證電動(dòng)變槳距控制系統(tǒng)的良好動(dòng)態(tài)特性。
電動(dòng)變槳距控制系統(tǒng)采用位置環(huán)、速度環(huán)、電流環(huán)三閉環(huán)控制,其中位置環(huán)用于實(shí)現(xiàn)位置的精確控制,速度環(huán)和電流環(huán)分別用于實(shí)現(xiàn)快速的跟蹤和動(dòng)態(tài)響應(yīng),如圖8所示。變槳時(shí),變槳控制器給定槳距角θ*,其與伺服電機(jī)位置反饋θr進(jìn)行比較,作為位置控制器的輸入;位置控制器的輸出w*作為速度控制器的輸入,經(jīng)過速度控制器,其輸出iq作為電流給定值;電流給定值與實(shí)際電流的差值送到電流控制器中,輸出控制電壓,利用空間電壓矢量脈寬調(diào)制算法對(duì)三相逆變器的電壓進(jìn)行控制,使電機(jī)獲得圓形磁鏈,實(shí)現(xiàn)電流、轉(zhuǎn)速和位置的控制。

圖8 電動(dòng)變槳距控制結(jié)構(gòu)框圖
3.3 電動(dòng)變槳距控制系統(tǒng)的控制器設(shè)計(jì)
電動(dòng)變槳距控制系統(tǒng)的控制框圖如圖9(a)所示,其動(dòng)態(tài)結(jié)構(gòu)框圖如圖9(b)所示,按照先內(nèi)環(huán)后外環(huán)的原則,設(shè)計(jì)的控制器依次為電流控制器、速度控制器和位置控制器。
(1)電流控制器的設(shè)計(jì)。電流環(huán)控制對(duì)象的傳遞函數(shù)為

其中:Km=1/RS;Tli=Lq/RS;Ti= τv+Toi。
為使電流環(huán)有較快的響應(yīng),σ≤5%,選取ζ=0.707,Ki×Ti=0.5,電流控制器的參數(shù)設(shè)計(jì)為

(2)速度控制器的設(shè)計(jì)。速度環(huán)控制對(duì)象的傳遞函數(shù)為

其中:Kon=KlRsα/TmKΦ;Kl=1/β;Tl=1/Ki;T∑n=Tl+Ton;Tm為電機(jī)的機(jī)電時(shí)間常數(shù)。
由于電動(dòng)變槳距控制系統(tǒng)實(shí)現(xiàn)無靜差的同時(shí),必須滿足一定的抗干擾性能,所以將其校正為典型Ⅱ型系統(tǒng),當(dāng)h=5時(shí),Ⅱ型系統(tǒng)具有較好的跟隨和抗擾動(dòng)性能。
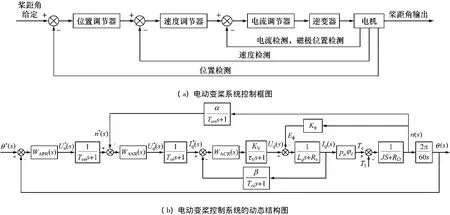
圖9 電動(dòng)變槳控制系統(tǒng)控制
Ⅱ型系統(tǒng)中頻寬h:

速度控制器的參數(shù)設(shè)計(jì)為
(3)位置控制器的設(shè)計(jì)。位置環(huán)控制對(duì)象的傳遞函數(shù)為

其中:Tw=nsdJ/9.55Tsd;
Kw——電機(jī)實(shí)際速度和伺服速度指令的比值;
Tw——單位速度階躍響應(yīng)時(shí)間;
nsd——設(shè)定速度;
Tsd——設(shè)定電磁轉(zhuǎn)矩。
作為連續(xù)跟蹤控制,位置伺服不希望出現(xiàn)超調(diào)與振蕩,以免位置控制精度下降,故將位置環(huán)校正成典型Ⅰ型系統(tǒng),即ζ=0,系統(tǒng)位置成為臨界阻尼或者接近臨界阻尼過程。
位置控制器的比例系數(shù)設(shè)計(jì)為

在電動(dòng)變槳距控制系統(tǒng)中,速度控制器和電流控制器均采用PI控制,位置控制器采用比例位置控制器,保證電動(dòng)變槳距控制系統(tǒng)的良好性能。
3.4 電動(dòng)變槳距系統(tǒng)仿真
根據(jù)電動(dòng)變槳距系統(tǒng)執(zhí)行機(jī)構(gòu)原理,利用Simulink搭建基于id=0的PMSM電動(dòng)變槳距控制系統(tǒng)仿真模型。槳距角給定信號(hào)如圖10所示。基本仿真過程為首先風(fēng)力機(jī)處于順槳位置,第10 s開始功率調(diào)節(jié)(60°-40°-50°-20°),第25 s正常關(guān)機(jī),槳葉順槳至90°。

圖10 槳距角的給定
電動(dòng)變槳距控制系統(tǒng)仿真結(jié)果如圖11所示。由圖分析可知,電動(dòng)變槳系統(tǒng)能夠根據(jù)給定槳距角,準(zhǔn)確輸出槳距角,位置無超調(diào)。在變槳過程中,變槳速度為10°/s,電磁轉(zhuǎn)矩響應(yīng)快,與槳葉負(fù)荷轉(zhuǎn)矩保持同步平衡。另外當(dāng)系統(tǒng)出現(xiàn)故障時(shí),能夠在8 s內(nèi)使槳葉順槳,保護(hù)風(fēng)機(jī)安全。
總體來說,電動(dòng)變槳距系統(tǒng)運(yùn)行穩(wěn)定,具有較好的靜態(tài)和動(dòng)態(tài)特性,能夠滿足高性能電動(dòng)變槳距系統(tǒng)的精確槳葉位置控制和快速動(dòng)態(tài)響應(yīng)等性能要求。
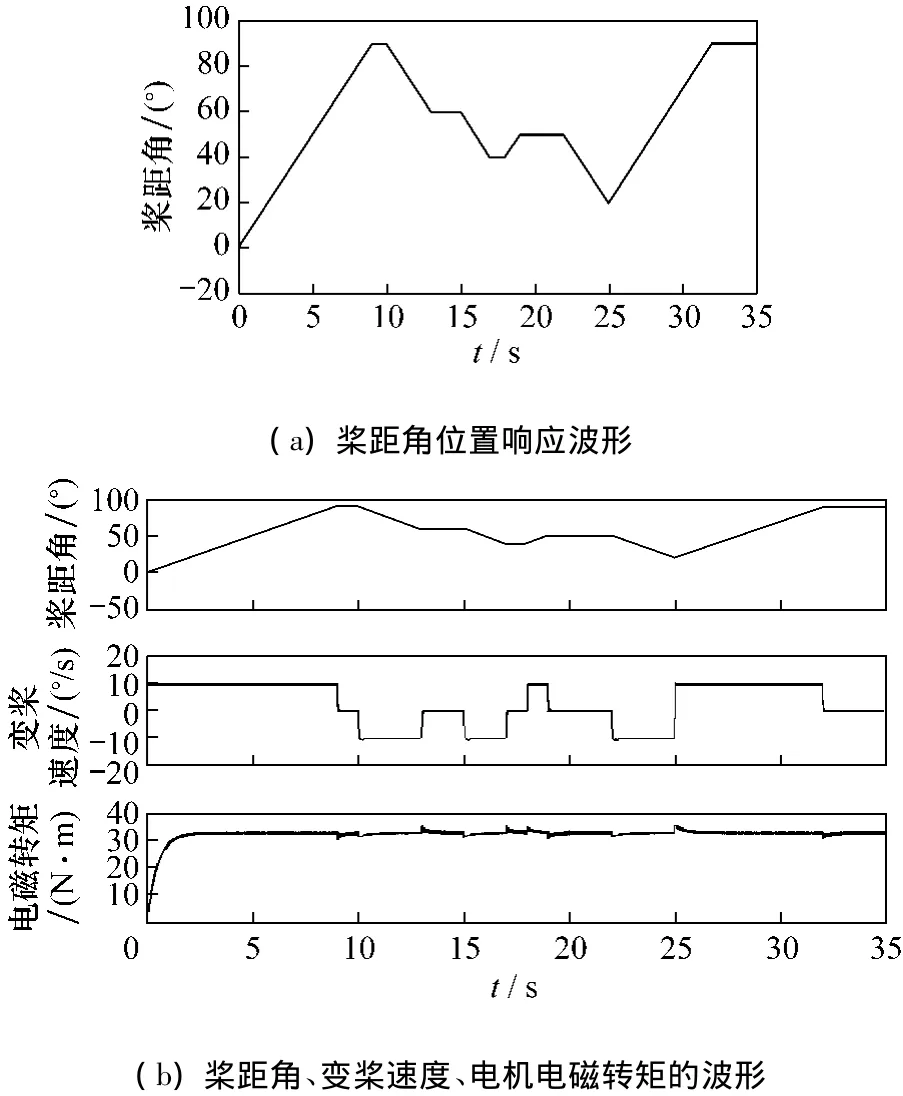
圖11 電動(dòng)變槳距控制系統(tǒng)仿真結(jié)果
4 結(jié)語
液壓變槳和電動(dòng)變槳,在功能方面,沒有優(yōu)劣之分;在性能方面,由于執(zhí)行機(jī)構(gòu)的不同,兩種變槳形式各有各的特點(diǎn)。本文針對(duì)兩種變槳距控制,從變槳系統(tǒng)總體結(jié)構(gòu)、執(zhí)行機(jī)構(gòu)的結(jié)構(gòu)原理、變槳系統(tǒng)控制、控制器設(shè)計(jì)等方面進(jìn)行了研究,給實(shí)際變槳控制系統(tǒng)的設(shè)計(jì)提供了理論支持。另外對(duì)大型風(fēng)機(jī)的液壓變槳距系統(tǒng)采用SimHydraulics工具箱進(jìn)行液壓系統(tǒng)元器件的建模和仿真,以及對(duì)大型風(fēng)機(jī)的電動(dòng)變槳距系統(tǒng)采用Simulink工具箱進(jìn)行電動(dòng)系統(tǒng)元器件的建模和仿真,不僅直觀地反映了變槳距系統(tǒng)的動(dòng)態(tài)特性,而且液壓系統(tǒng)與電動(dòng)系統(tǒng)可以無縫連接,從而可實(shí)現(xiàn)整個(gè)大型風(fēng)電機(jī)組的全工況仿真,為加快大型風(fēng)電機(jī)組的研制提供有力的理論保證。
[1]Burton T,Sharpe D,Jenkins N,et al.Wind energy:handbook[M].John Wiley and Sons,2005.
[2]Hau E.Wind turbines:fundamentals,technologies,application,economics[M].Springer Verlag,2006.
[3]劉曉林.淺談風(fēng)力發(fā)電機(jī)組的液壓和電動(dòng)變槳系統(tǒng)[J].電氣應(yīng)用,2009,28(15):70-73.
[4]王群,張桂香,陳楊,等.MW級(jí)變速恒頻風(fēng)力發(fā)電機(jī)組電液變槳距系統(tǒng)的研究[J].機(jī)械研究與應(yīng)用,2009,103(5):6-8.
[5]屈圭,楊勇,吳曉丹.MW級(jí)風(fēng)電機(jī)液壓變槳系統(tǒng)設(shè)計(jì)與動(dòng)態(tài)分析[J].機(jī)械設(shè)計(jì),2009,237(7):54-56.
[6]孫靖宇.兆瓦級(jí)風(fēng)電機(jī)組變槳距系統(tǒng)的仿真研究[J].伺服控制,2009(3):32-34.
[7]李志梅,魏本建,趙東標(biāo).風(fēng)電機(jī)組電動(dòng)變槳距傳動(dòng)機(jī)構(gòu)設(shè)計(jì)與仿真[J].機(jī)械傳動(dòng),2009,156(6):53-55.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32