船載多傳感器組合定位系統(tǒng)設(shè)計與實現(xiàn)*
2011-06-06 10:05:30李慧麗
艦船電子工程 2011年10期
李慧麗 黃 偉 趙 恒
(武漢數(shù)字工程研究所 武漢 430074)
1 引言
隨著船舶定位技術(shù)的發(fā)展,定位設(shè)備的種類越來越多,定位系統(tǒng)的種類越來越多,如全球定位系統(tǒng)(Global Position System,簡稱GPS)、羅蘭C無線電定位系統(tǒng)(Loran C)、慣性導航系統(tǒng)(Inertial Navigation System,簡稱INS)、船位推算系統(tǒng)(Dead Reckoning System,簡 稱 DRS)、多 普 勒(Doppler)測速系統(tǒng)以及電子海圖顯示與信息系統(tǒng)(Electronic Chart Display and Information Sys-tem,簡稱ECDIS)等[1],單一的使用某種定位系統(tǒng)在性能上都存在著局限性,難以滿足船舶航行的可靠性要求,對自主性、可靠性以及精度性要求高的船舶導航應用場合,尤其是軍用場合,需要定位系統(tǒng)可以運用現(xiàn)代信息融合技術(shù)充分利用船載多種設(shè)備,實現(xiàn)設(shè)備管理和信息集成,以獲得更高的定位精度和可靠性。
文章研究設(shè)計了基于電子海圖的多傳感器組合定位系統(tǒng)。該系統(tǒng)以電子海圖系統(tǒng)為平臺,優(yōu)化配置船載多種傳感器設(shè)備,采用GPS和DR組合定位技術(shù),實現(xiàn)了船舶的可靠性定位。利用信息融合技術(shù)綜合處理傳感器數(shù)據(jù),得到船舶最佳的定位信息,通過電子海圖實時動態(tài)地顯示船舶的綜合航行態(tài)勢,從而構(gòu)成高可靠性、多功能的船舶組合定位系統(tǒng)。
2 系統(tǒng)的結(jié)構(gòu)組成和基本工作原理
2.1 結(jié)構(gòu)組成
系統(tǒng)實時采集船載傳感器的報文并進行解析,利用融合策略處理各類定位數(shù)據(jù),以電子海圖作為定位、監(jiān)控和指揮的平臺,在電子海圖上實現(xiàn)了對航行中船舶的精確定位和對船載多傳感器的可視化管理,結(jié)構(gòu)圖如圖1所示。
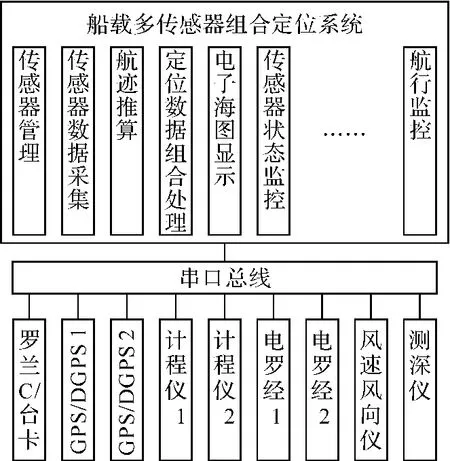
圖1 定位系統(tǒng)結(jié)構(gòu)圖
其中,傳感器管理模塊管理多源異質(zhì)的傳感器,所謂多源異質(zhì)是指數(shù)據(jù)來源于多個不同類型的傳感器[2],該模塊實現(xiàn)了將船載多源異質(zhì)傳感器接入系統(tǒng)進行串口綁定并實現(xiàn)分類管理的功能;傳感器數(shù)據(jù)采集模塊主要完成對各個傳感器報文的接收以及預處理,通過對報文進行解析,剔除不完整數(shù)據(jù),保留有效的數(shù)據(jù);航跡推算模塊主要是用推算算法進行下一時刻的船位推算;定位數(shù)據(jù)組合處理模塊是組合定位系統(tǒng)的關(guān)鍵部分,它是將多個數(shù)據(jù)源的數(shù)據(jù)通過融合策略將它們?nèi)诤系揭黄穑瑥亩岣呦到y(tǒng)的準確性和魯棒性;電子海圖系統(tǒng)作為本系統(tǒng)的顯示平臺,主要是實時更新當前船舶的態(tài)勢,并對各類設(shè)備的狀態(tài)、定位數(shù)據(jù)以及船舶航行狀態(tài)進行監(jiān)控,做出相應的告警提示,提醒操作人員注意。
2.2 定位原理
DGPS以及GPS定位系統(tǒng)具有全球全天候高精度連續(xù)定位能力,以及操作使用方便、自動化程度高、可靠性高和費用低廉等優(yōu)點[3],但是其信號容易受到其他信號的干擾以及衛(wèi)星星歷誤差和衛(wèi)星信號延遲的影響[4]。所以本系統(tǒng)使用以DGPS為首的位置傳感器作為主用定位設(shè)備。在其出現(xiàn)設(shè)備故障或者數(shù)據(jù)無效的情況下,系統(tǒng)主動采用其他船用傳感器如羅經(jīng)(GYRO)、計程儀(LOG)等的定位定向數(shù)據(jù)或者人工觀測的定位定向數(shù)據(jù),使用船位推算(Dead reckoning,簡稱DR)進行輔助定位,進而實現(xiàn)系統(tǒng)的高可靠性定位。
DR作為一種先進的自主式定位方法,其實現(xiàn)導航定位的原理卻是比較簡單的:以起航點或觀測船位為推算起始點,根據(jù)船舶最基本的航海儀器(GYRO和LOG)所指示的航向、航程以及船舶的操縱要素和風流要素等,在不借助外界導航物標的條件下,推算出具有一定精度的航跡和船位[5],在2D平面內(nèi),其推算方程[5]如式(1)所示。
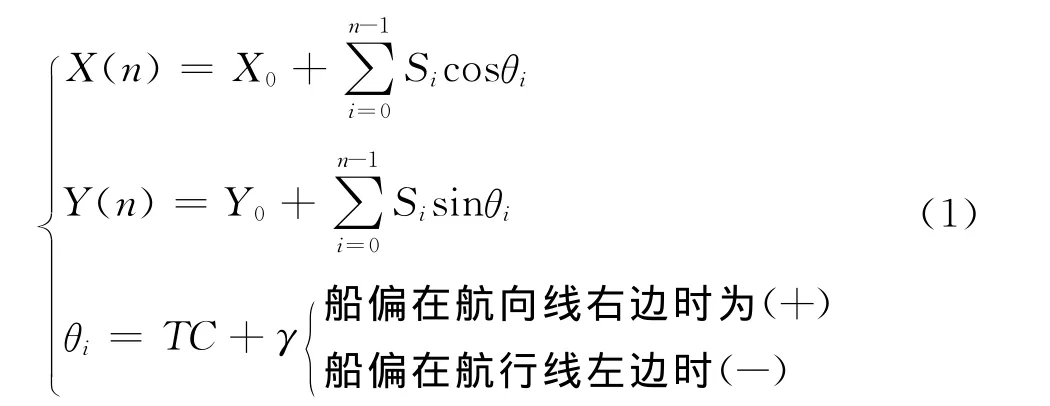
式中,X0、Y0表示推算起點的位置,Si表示Ti-1時刻到Ti時刻船舶行使距離,θi表示Ti-1時刻到Ti時刻船舶行使航跡向,TC表示真航向,γ表示風流壓差,它等于風壓差與流壓差的代數(shù)和。
由式(1)可以看出,雖然DR可以完全自主的進行定位,但是定位精度都取決于傳感器的測量精度,當航向信息的精度較差時,DR推算出來的船舶航跡將很快地偏離實際行使的軌跡;而且隨著時間的推移,測量誤差以及計算誤差將會遞增,精確度從而也呈現(xiàn)出遞減趨勢,因此,單獨的船位推算系統(tǒng)不宜進行長時間的單獨定位。
系統(tǒng)利用GPS具有長時間絕對定位的穩(wěn)定性,而DR具有短時間相對定位的穩(wěn)定性的特點,一方面當GPS觀測衛(wèi)星數(shù)較多、衛(wèi)星幾何分布結(jié)構(gòu)較好時工作于GPS模式,同時利用GPS精確的定位結(jié)果輔助DR的初始化;另一方面,一旦GPS出現(xiàn)設(shè)備故障或者定位數(shù)據(jù)無效時,系統(tǒng)又可以自動地切換到DR導航方式,直至GPS恢復正常狀態(tài)。采用這種組合定位方式可以大大提高導航的安全性和系統(tǒng)的可靠性。
3 關(guān)鍵設(shè)計的實現(xiàn)
系統(tǒng)主要由系統(tǒng)初始化模塊、串行通訊模塊、數(shù)據(jù)采集模塊、數(shù)據(jù)組合處理模塊以及數(shù)據(jù)顯示模塊等幾部分組成。在實現(xiàn)過程中,需要解決一些關(guān)鍵技術(shù),例如多源異質(zhì)傳感器的管理,以及定位信息的解析以及組合處理等。本文就以下兩方面對系統(tǒng)具體實現(xiàn)過程做出論述。
3.1 多傳感器管理
通常情況下,船上一般都載有多個定位用傳感器設(shè)備,如何管理這些傳感器資源,最大化其利用率以更好的為導航服務(wù),具有重要的意義。系統(tǒng)將各種定位相關(guān)傳感器設(shè)備按其用途來劃分,分為以下四大類,分別是:
1)位置源傳感器:能夠提供本船定位信息(包括地理位置、航速航向等信息)的傳感器,比如Loran-C、GPS、DGPS等。
2)航速源傳感器:能夠提供本船航速信息的傳感器,比如LOG。
3)航向源傳感器:能夠提供本船航向信息的傳感器,比如GYRO。
4)其它類傳感器:不直接提供本船航速航向或者位置信息,但在本船定位過程中要參考價值的傳感器,例如測深儀、風速風向儀等。
為了實現(xiàn)可靠性定位,對位置源傳感器、航速源傳感器、以及航向源傳感器進行雙配置,形成冗余備份。在這幾類設(shè)備接入系統(tǒng)的同時進行優(yōu)先級指定,規(guī)定它們中只能有一個主用設(shè)備,另外一個作為備用設(shè)備,在主用設(shè)備完好的情況下,系統(tǒng)采用主用設(shè)備的輸出進行本船定位,同時根據(jù)兩個設(shè)備的精度,設(shè)定一個閾值,該閾值用于監(jiān)測主備用設(shè)備的輸出值差異,當主備用設(shè)備輸出差異大于設(shè)定的閾值時,提醒操作人員注意,以此來監(jiān)測兩個設(shè)備是否工作在正常狀態(tài),當確定主用設(shè)備出現(xiàn)故障時,可以提高備用設(shè)備的優(yōu)先級,從備用改為主用。
3.2 數(shù)據(jù)處理過程
系統(tǒng)在運行過程中可能在同一時間會收到來自多個傳感器的多條報文,對于數(shù)據(jù)的采集和解析是影響整個系統(tǒng)效率和可靠性的重要因素。根據(jù)國際電工委員會制定的IEC61162-1協(xié)議,在程序中定義個11個與常用定位相關(guān)語句相對應的語句結(jié)構(gòu)體,語句歸納詳見表1所示。串口接收線程將獲取到的數(shù)據(jù)按照協(xié)議提取,保留符合標準的完整語句,拋棄不完整的語句;信息解析線程將這些語句解析后分類放入相應的結(jié)構(gòu)體內(nèi);數(shù)據(jù)融合處理線程對數(shù)據(jù)進行融合處理,然后分發(fā)給界面以及外部設(shè)備。
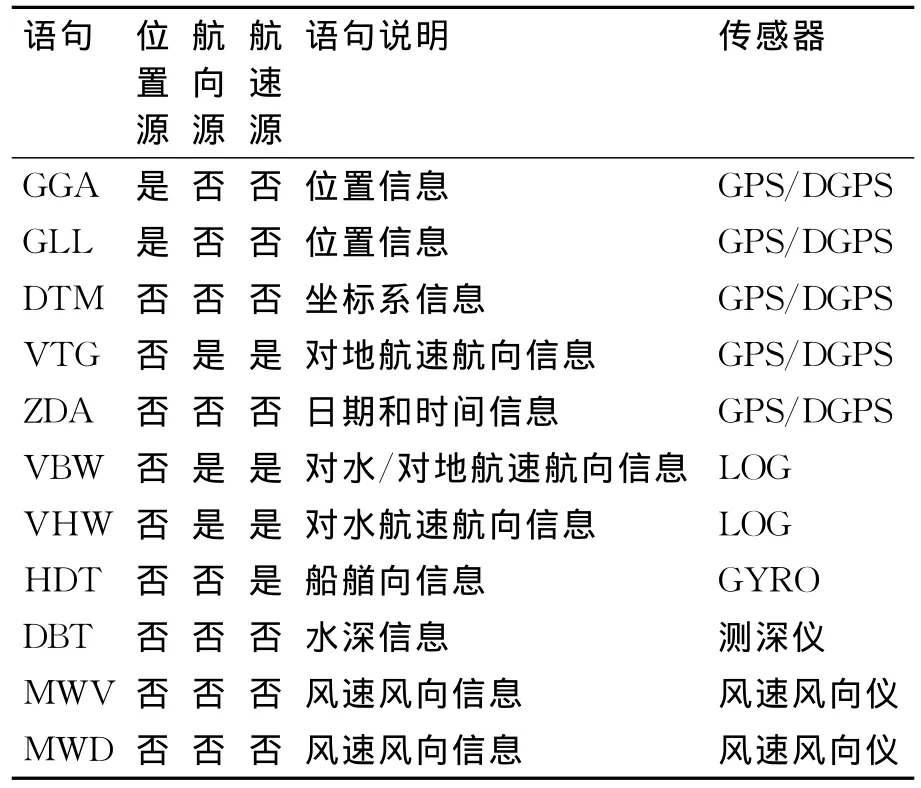
表1 定位相關(guān)語句
信號在傳輸和接收過程中不可避免的要受到噪聲的干擾或污染,在量測過程中也不可避免的要引入一定的量測噪聲,這些都使模型的定位精度降低,為了提供船舶的定位精度,系統(tǒng)采用了Kalman濾波算法,對所有可操作的定位傳感器提供的位置信息進行濾波處理,為本船提供平滑過渡的位置信息。同時將此信息連同航速航向信息,更新DR模塊的本船的定位信息,以作備用。
數(shù)據(jù)處理過程自動識別傳感器是否工作在正常狀態(tài),若均工作在正常狀態(tài),則進行融合,若其中某個傳感器暫時失效,則拋棄其受污染的數(shù)據(jù),依照一系列判斷邏輯,采用可用的且精度最高的傳感器的數(shù)據(jù),進行船舶定位,來提高系統(tǒng)輸出數(shù)據(jù)的精確性和整個系統(tǒng)的健壯性。其中,位置信息自動識別過程如圖2所示。
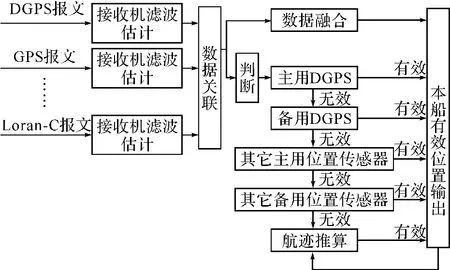
圖2位置信息自動識別過程邏輯框圖
航速航向信息的自動識別過程如圖3所示,DGPS、GPS所獲取的對地航速、對地航向具有最高的優(yōu)先級,當這兩類傳感器無效的時候,次之選擇LOG提供的對地航速航向,如果LOG也無效,則先選擇采用人工設(shè)置的設(shè)置的航速、航向,最低優(yōu)先級采用LOG提供的對水航速以及GYRO提供的本船航向信息。
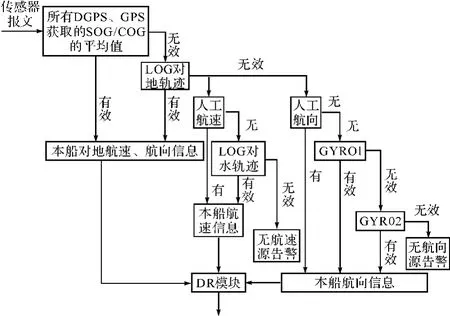
圖3航速航向信息自動識別過程邏輯框圖
4 試驗結(jié)果與分析
使用綜合船橋通導設(shè)備集成模擬器進行仿真實驗,實驗配備兩個GPS,兩個LOG,兩個GYRO,噪音比率統(tǒng)一設(shè)置為5%。設(shè)計一條計劃航路,確定14個參考點,以檢驗組合定位系統(tǒng)的精度,航路起始點位置為北緯29°57′36″,西經(jīng)121°59′57″,終止點位置為北緯29°39′56″,西經(jīng)122°34′45″,全長39.20海里。
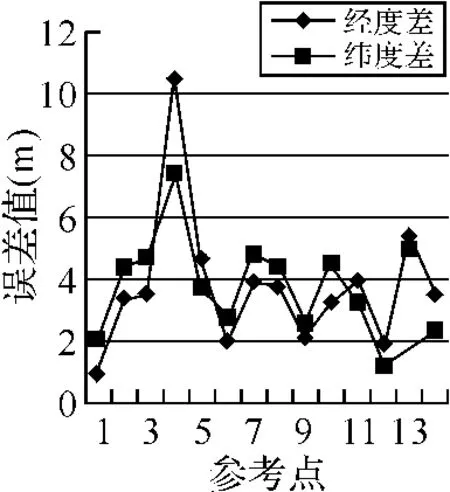
圖4 定位設(shè)備完好情況下系統(tǒng)誤差統(tǒng)計
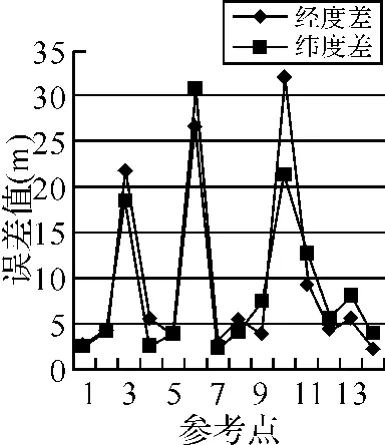
圖5 GPS失效情況下使用LOG、GYRO進行DR定位誤差統(tǒng)計
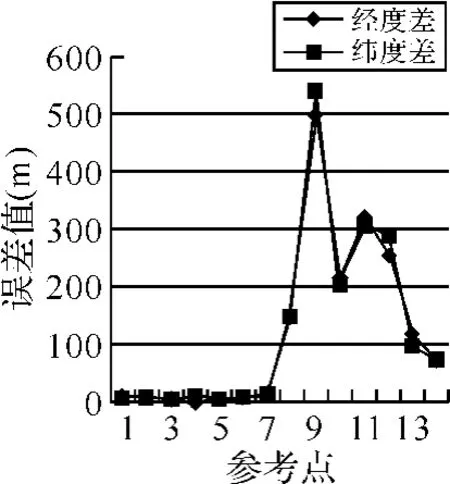
圖6 定位設(shè)備失效時使用人工輸入進行DR定位誤差統(tǒng)計
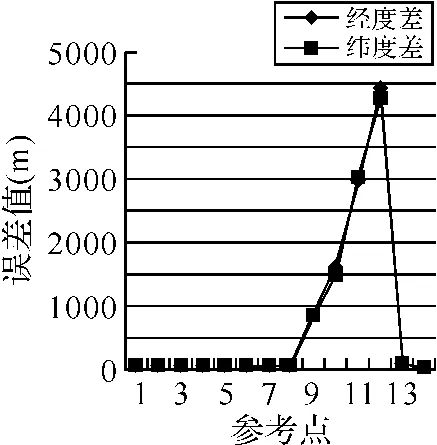
圖7 定位設(shè)備失效時利用慣性DR定位誤差統(tǒng)計
采集四組實驗數(shù)據(jù),分別對應四種定位模式:1)模式為GPS、LOG、GYRO都正常工作,組合定位系統(tǒng)經(jīng)緯度誤差見圖4所示;2)為定位過程中有幾段時間內(nèi)GPS工作失效,進行DR定位,推算用數(shù)據(jù)由LOG、GYRO提供,組合定位系統(tǒng)經(jīng)緯度誤差見圖5所示;3)為定位過程中一段時間以后GPS、LOG、GYRO相繼失效,進行DR定位,推算用數(shù)據(jù)由人工調(diào)整輸入提供,組合定位系統(tǒng)經(jīng)緯度誤差見圖6所示;4)為定位過程中一段時間內(nèi)GPS、LOG、GYRO相繼失效,根據(jù)慣性定律,進行DR定位,推算用數(shù)據(jù)采用定位設(shè)備最新更新的船舶定位數(shù)據(jù),組合定位系統(tǒng)定位經(jīng)緯度誤差見圖7所示。
由圖4可知,定位設(shè)備完好的情況下,系統(tǒng)誤差最低,在圖5、圖6以及圖7中,波峰所在的位置即為定位設(shè)備失效以后一段時間,由圖可知,GPS具有最高的定位性能;LOG、GYRO由于不提供位置數(shù)據(jù),所以只能減緩GPS失效時組合定位系統(tǒng)誤差的發(fā)散;人工輸入DR用推算起點、航速航向,因主觀差異性比較大,定位誤差的浮動比較大,與操作者的個人經(jīng)驗有很大的關(guān)系;而依據(jù)設(shè)備失效時所得的最新的定位數(shù)據(jù)進行慣性推算定位,在短期內(nèi)能保持系統(tǒng)的定位精度,但是隨著時間的推進,誤差會遞增,當GPS再次可用時,位置誤差才可以得到校正。所以,在實際使用中,根據(jù)特定情況,不同組合定位方式的快速切換,可以在一定程度上保障航行的安全,同時為設(shè)備維修爭取了時間。
5 結(jié)語
該組合定位系統(tǒng)將船載多種定位傳感器如GPS、DGPS、LOG、GYRO等同電子海圖,船位推算有機地結(jié)合起來,充分利用了GPS和DR的互補作用。論文詳細介紹了定位系統(tǒng)的基本原理以及實現(xiàn)過程中的關(guān)鍵設(shè)計,通過仿真實驗,比較了系統(tǒng)提供的四種定位模式下的定位精度,驗證了該設(shè)計思路的簡單可行性以及該組合定位系統(tǒng)能一定程度上提高航行的可靠性和精度。
[1]韓劍輝,許鎮(zhèn)琳,趙承利,等.船舶綜合導航系統(tǒng)應用技術(shù)[J].天津大學學報,2010,43(2):121~125
[2]劉效武,王慧強,梁穎,等.基于異質(zhì)多傳感器融合的網(wǎng)絡(luò)安全態(tài)勢感知模型[J].計算機科學,2008,35(8):69~73
[3]饒滾金,徐海蓉.GPS不能作為惟一的導航定位設(shè)備[J].世界海運,2003,26(3):48~49
[4]湯文鈺.GPS誤差對船舶定位的影響及措施[J].中國水運,2009,9(4):16~17
[5]高玉德.航海學[M].大連海事大學出版社,2003:246~262
[6]劉嚴巖.多傳感器數(shù)據(jù)融合中幾個關(guān)鍵技術(shù)的研究[D].中國科技大學,2006,5
[7]彭燕.無線傳感器網(wǎng)絡(luò)定位優(yōu)化算法及其仿真[J].計算機與數(shù)字工程,2011,39(3)
[8]李建,韓忠.無線傳感器網(wǎng)絡(luò)定位技術(shù)探析[J].計算機與數(shù)字工程,2010,39(5)
[9]XU Hai-feng,Research on GPS/DR/MM Integrated Navigation Positioning Algorithm For Vehicle[J].Computer Applications and Software,2008,25(10):144~147
[10]FURUNO OPERATOR'S MANUAL-Electronic Chart Display and Information System[G].FURUNO ELECTRIC CO.LTD.,2008
[11]IEC 61162-1Ed.3-2007.4Maritime navigation and radiocommunication equipment and systems-Digital interfaces[S].International Electrotechnical Commission,2007
猜你喜歡
艦船科學技術(shù)(2022年14期)2022-09-22 03:07:40
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
電子制作(2018年11期)2018-08-04 03:26:08
中華手工(2017年2期)2017-06-06 23:00:31
工業(yè)設(shè)計(2016年12期)2016-04-16 02:52:00
中外會展(2014年4期)2014-11-27 07:46:46
消費者報道(2014年7期)2014-07-31 11:23:57
航海(2005年4期)2005-04-29 00:00:00
