基于dsPIC30F5015的動(dòng)車組自動(dòng)門控制系統(tǒng)研究
2011-06-13 03:38:56騰北京鐵路局北京動(dòng)車客車段北京100039
科技傳播 2011年24期
馬 騰北京鐵路局北京動(dòng)車客車段,北京 100039
基于dsPIC30F5015的動(dòng)車組自動(dòng)門控制系統(tǒng)研究
馬 騰北京鐵路局北京動(dòng)車客車段,北京 100039
本文基于美國(guó)微芯科技公司的數(shù)字信號(hào)控制器dsPIC30F5015對(duì)動(dòng)車組自動(dòng)門控制系統(tǒng)的硬件構(gòu)成及軟件實(shí)現(xiàn)方法進(jìn)行了設(shè)計(jì)和研究,實(shí)現(xiàn)的功能有:動(dòng)車組自動(dòng)門的防擠壓功能、自動(dòng)門打開和關(guān)閉時(shí)的速度緩沖,使控制系統(tǒng)精確、穩(wěn)定的運(yùn)行。
dsPIC30F5015;動(dòng)車組;自動(dòng)門控制系統(tǒng)
動(dòng)車組是自帶動(dòng)力的,固定編組的列車兩端分別設(shè)有司機(jī)室進(jìn)行駕駛操作,配備現(xiàn)代化服務(wù)設(shè)施的旅客列車的單元,動(dòng)車組技術(shù)源于地鐵,是新時(shí)代先進(jìn)科技的產(chǎn)物。

動(dòng)車組列車的自動(dòng)門對(duì)列車的安全運(yùn)行起著至關(guān)重要的作用,因此,在動(dòng)車組自動(dòng)門的安全性能上要求在逐步提高。
控制系統(tǒng)通過(guò)對(duì)電機(jī)電流采樣的方法來(lái)實(shí)現(xiàn)自動(dòng)門的防擠壓功能,電路圖如圖1所示:
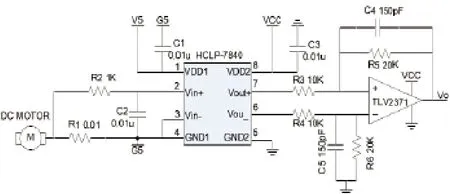
圖1
HCPL-7840是安捷倫公司生產(chǎn)的光電隔離放大器,其作用就是檢測(cè)電機(jī)電流。電機(jī)電流通過(guò)一個(gè)外部采樣電阻得到模擬電壓,通過(guò)原級(jí)采樣信號(hào)輸入端進(jìn)入芯片,在次級(jí)得到一個(gè)差分輸入電壓,此差分輸入電壓和電機(jī)電流成正比關(guān)系。因?yàn)椴蓸狱c(diǎn)路所采集的電機(jī)電流是電壓信號(hào),必須通過(guò)AD轉(zhuǎn)換器轉(zhuǎn)換成數(shù)字信號(hào),HCPL-7840的輸入信號(hào)范圍是-1.6V~+1.6V的差分電壓信號(hào)[1],AD轉(zhuǎn)換器要求的輸入信號(hào)一般滿足0V~5V范圍,因此,需要對(duì)采樣到的差分電壓信號(hào)進(jìn)行偏執(zhí)放大。TLV2371是5V單電源運(yùn)放,令R3=R4,R5=R6,使TLV2371不僅達(dá)到差分放大的作用,而且減少了基極偏置電流引起的失調(diào)。根據(jù)經(jīng)驗(yàn),選擇R3=R4=10k,R5=R6=20k,在滿足香農(nóng)定理[1]的條件下,為了能夠達(dá)到頻率匹配、低通濾波、消除高頻噪聲干擾的作用,電路中安置了C4、C5。
設(shè)電機(jī)電樞電流大小為I,則檢測(cè)電路輸出的電壓是:
數(shù)字信號(hào)控制器中AD轉(zhuǎn)換器的輸入電壓Vad就是Vo,它與電機(jī)電流成正比例關(guān)系,因?yàn)殡姍C(jī)的轉(zhuǎn)矩和電流之間存在線性關(guān)系,通過(guò)檢測(cè)擠壓時(shí)的臨界電流值,根據(jù)電機(jī)的轉(zhuǎn)矩和電流之間存在線性關(guān)系就能夠得出電機(jī)的轉(zhuǎn)矩,根據(jù)轉(zhuǎn)矩便可以計(jì)算出自動(dòng)門的擠壓力,知道自動(dòng)門的擠壓力同樣能夠算出電機(jī)電流的臨界值,當(dāng)電機(jī)電流超過(guò)控制系統(tǒng)設(shè)定的臨界值時(shí),就會(huì)調(diào)用自動(dòng)門的防擠壓軟件程序,從而使防擠壓功能得到實(shí)現(xiàn)。
通過(guò)在電機(jī)軸上安裝光電編碼器,來(lái)檢測(cè)電機(jī)的轉(zhuǎn)速和位置,實(shí)現(xiàn)對(duì)電機(jī)轉(zhuǎn)速的反饋控制。光電編碼器的輸出信號(hào)需要通過(guò)整形電路處理,圖2為整形電路。

圖2
光電編碼器輸出兩路正交的信號(hào),A信號(hào)和B信號(hào),A信號(hào)和B信號(hào)之間的相位差相差90度,直流電平為5V。光電編碼器如果延順時(shí)針?lè)较蛐D(zhuǎn),則A相信號(hào)超前B相信號(hào)90度,延逆時(shí)針?lè)较蛐D(zhuǎn)時(shí),B相信號(hào)超前A相信號(hào)90度,為了產(chǎn)生標(biāo)準(zhǔn)的方波信號(hào),必須對(duì)編碼器的輸出信號(hào)進(jìn)行整形,整形電路的主要組成部分就是差動(dòng)比較器LM2903,通過(guò)整形后的光電編碼器輸出信號(hào)送給dsPIC30F5015的正交編碼器借口模塊的兩個(gè)輸入端QEA和QEB,通過(guò)正交編碼器對(duì)A相和B相信號(hào)進(jìn)行解碼,得到用于累計(jì)計(jì)數(shù)值的16位向上/向下得計(jì)數(shù)器的時(shí)鐘信號(hào)和計(jì)數(shù)方向信號(hào)。正交編碼器接口框圖如圖3。

圖3
通過(guò)對(duì)脈沖個(gè)數(shù)的計(jì)算就可以得到電機(jī)的轉(zhuǎn)角位移,從而確定自動(dòng)門所運(yùn)行的位置,通過(guò)脈沖頻率的計(jì)算,得到電機(jī)的轉(zhuǎn)速,由此對(duì)電機(jī)的轉(zhuǎn)速進(jìn)行反饋控制,達(dá)到自動(dòng)門打開和關(guān)閉時(shí)的速度緩沖功能。
為了有效的實(shí)現(xiàn)門速自動(dòng)控制功能,采用負(fù)反饋的閉環(huán)控制系統(tǒng)。閉環(huán)控制系統(tǒng)中采用PID算法。動(dòng)車組自動(dòng)門控制系統(tǒng)的門速反饋控制[2-4]原理圖如圖4所示:

圖4
光電編碼器測(cè)得電機(jī)的轉(zhuǎn)速后將信號(hào)送到信號(hào)控制器DSC,測(cè)得的轉(zhuǎn)速值和DSC設(shè)定的值之間存在一個(gè)偏差,這個(gè)偏差由PID算法處理后產(chǎn)生一個(gè)控制量,這個(gè)控制量能夠改變DSC發(fā)出的PWM信號(hào)的占空比,從而使電機(jī)的轉(zhuǎn)動(dòng)速度得到穩(wěn)定調(diào)節(jié),并使得電機(jī)轉(zhuǎn)速維持在系統(tǒng)設(shè)定的速度范圍內(nèi)。
防擠壓功能的軟件設(shè)計(jì)流程圖5。

圖5
當(dāng)壓力值超限時(shí),調(diào)用防擠壓程序,使自動(dòng)門電機(jī)制動(dòng),并開始反轉(zhuǎn)開門,當(dāng)門全開后,電機(jī)停轉(zhuǎn)等待5s鐘(此時(shí)間可以通過(guò)軟件設(shè)定改變),此時(shí)便是讓旅客和物體移開門道位置的時(shí)間,如果門沒(méi)有全開,則電機(jī)繼續(xù)反轉(zhuǎn)開門動(dòng)作,5s鐘過(guò)后,電機(jī)開始執(zhí)行正轉(zhuǎn)關(guān)門,若門已關(guān)好,則退出程序,開始行車反之則繼續(xù)執(zhí)行關(guān)門動(dòng)作。
門速緩沖程序軟件設(shè)計(jì)流程圖6。
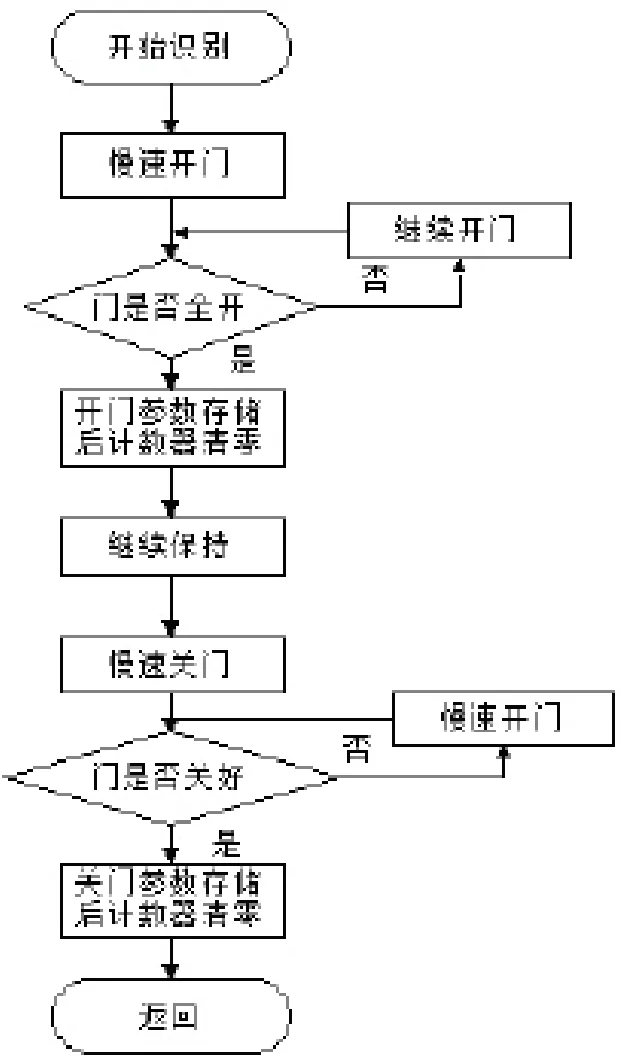
圖6
當(dāng)動(dòng)車組啟動(dòng)自動(dòng)門系統(tǒng)程序時(shí),軟件開始識(shí)別,執(zhí)行慢速開門動(dòng)作,當(dāng)門全開的時(shí)候,開門參數(shù)存儲(chǔ)后計(jì)數(shù)器清零,繼續(xù)保持開門位置一段時(shí)間(此時(shí)間按實(shí)際需要通過(guò)軟件設(shè)定),反之則繼續(xù)執(zhí)行開門動(dòng)作,之后,執(zhí)行慢速關(guān)門動(dòng)作,門關(guān)好后,關(guān)門參數(shù)存儲(chǔ),計(jì)數(shù)器清零,返回,反之則繼續(xù)執(zhí)行關(guān)門動(dòng)作。在開門和關(guān)門的整個(gè)過(guò)程中,自動(dòng)門控制系統(tǒng)通過(guò)光電編碼器一直在檢測(cè)這電機(jī)的轉(zhuǎn)速和位移,通過(guò)光電編碼器的檢測(cè)以及dsPIC30F5015對(duì)其信號(hào)的處理,就可以使門在其加速位置和減速位置改變其相應(yīng)的速度,從而保障自動(dòng)門的安全關(guān)閉。
綜上所述,動(dòng)車組關(guān)門時(shí)如果遇到障礙,阻礙車門關(guān)閉并達(dá)到一定的擠壓力時(shí),車門不能強(qiáng)行關(guān)閉,此時(shí)車門應(yīng)自動(dòng)重新打開,防止旅客受傷和物品的損壞,該過(guò)程就是動(dòng)車組自動(dòng)門的防擠壓功能。此外,動(dòng)車組自動(dòng)門在關(guān)閉的過(guò)程中速度也是變化的,類似于我們乘坐的電梯的門,在車門打開和關(guān)閉時(shí)需要緩沖,這就需要精確的檢測(cè)出出門的具體位置,并在相應(yīng)的位置做出速度變化的動(dòng)作以實(shí)現(xiàn)緩沖的目的。
[1]李勇.光電隔離放大器HCPL-7840在電機(jī)電流采樣中的應(yīng)用[J].自動(dòng)測(cè)量與控制,2008,27(7):60-62.
[2]王喜明,高偉.單片機(jī)對(duì)直流伺服電機(jī)控制的研究[J].科學(xué)技術(shù)與工程,2007,7(14):3588-3590.
[3]張紅娟,李維.基于PIC單片機(jī)的直流電機(jī)PWM調(diào)速系統(tǒng)[J].機(jī)電工程,2005,22(2):10-12.
[4]楊勇,李成福,王嵐.IGBT-PWM直流調(diào)速系統(tǒng)在船模自航中的應(yīng)用[J].應(yīng)用科技,2008,35(8):55-58.
U48
A
1674-6708(2011)57-0202-02
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
