等離子體對翼型流動分離控制歷程的PIV試驗研究
2011-06-15 01:27:10王萬波黃宗波王勛年沈志洪
實驗流體力學(xué) 2011年6期
關(guān)鍵詞:效果
黃 勇,王萬波,黃宗波,張 鑫,王勛年,沈志洪
(中國空氣動力研究與發(fā)展中心,四川 綿陽 621000)
等離子體對翼型流動分離控制歷程的PIV試驗研究
黃 勇,王萬波,黃宗波,張 鑫,王勛年,沈志洪
(中國空氣動力研究與發(fā)展中心,四川 綿陽 621000)
采用粒子圖像測速 (Particle Image Velocimetry,PIV)技術(shù),研究了介質(zhì)阻擋放電等離子體激勵對NACA0015翼型表面流動分離的控制特性及控制效果隨時間歷程的變化規(guī)律。結(jié)果表明,激勵電壓存在一個閾值,當(dāng)電壓小于閾值時,控制無效或效果不明顯;當(dāng)電壓接近閾值時,控制表現(xiàn)出不穩(wěn)定性并最終趨于穩(wěn)定;當(dāng)電壓大于閾值時,控制效果穩(wěn)定且顯著,氣流能夠很好地重附在翼型表面。
介質(zhì)阻擋放電;等離子體;流動控制;粒子圖像測速儀;風(fēng)洞試驗
0 引 言
等離子體流動主動控制技術(shù)是一種新型流動主動控制技術(shù),通過在飛行器翼面布置電極,在高電壓激勵下產(chǎn)生等離子體,能夠有效控制飛行器翼面繞流邊界層的分離,提高飛行器升阻比和失速迎角。該技術(shù)不需要活動的氣動控制面,對飛行器的結(jié)構(gòu)強度影響很小,并且具有控制響應(yīng)快、控制位置靈活、可靠性高、成本低、能效比高等突出優(yōu)點,因此具有很好的應(yīng)用前景[1-5]。
文獻(xiàn)[4]得出了激勵電壓存在一個閾值,當(dāng)電壓大于閾值時,可以實現(xiàn)氣流的完全再附著;文獻(xiàn)[6]利用PIV技術(shù)對EHD控制下NACA0015翼型繞流流場進(jìn)行了測量;張攀峰等[7]通過風(fēng)洞流動顯示實驗,研究了等離子體激勵低速條件下對平板表面分離剪切層的控制特性;李應(yīng)紅等[8]利用煙流流動顯示的方法得出在給定的流動分離狀態(tài)下,等離子體激勵的電壓存在一個閾值;鐘誠文等[9]利用PIV系統(tǒng),在靜止空氣中,定量測量了等離子體激勵器的誘導(dǎo)速度場,通過實驗發(fā)現(xiàn):在激勵頻率固定的情況下,誘導(dǎo)氣流速度隨著電壓的升高逐漸增大。
目前國內(nèi)外文獻(xiàn)大多研究等離子體穩(wěn)定后對氣流的控制特性。本文通過PIV試驗,從流場特性出發(fā),研究了等離子體對氣流分離控制特性隨時間歷程的變化規(guī)律。
1 試驗原理和系統(tǒng)
1.1 等離子體流動控制基本原理
等離子體對翼型流動控制的原理如圖1所示。在翼型表面布置電極,電極與高壓電源相連,電極附近的空氣在強電場作用下被電離,等離子體中的離子在空間不均勻電場的作用下,向電場梯度方向進(jìn)行定向運動,離子在定向運動的過程中與環(huán)境空氣分子碰撞,發(fā)生動量交換或?qū)饬餍纬蓴_動,從而實現(xiàn)對翼型流動的控制。
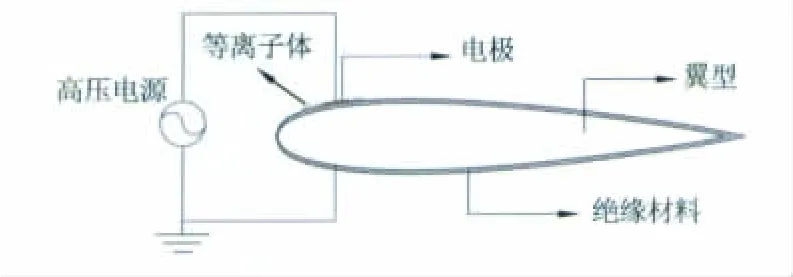
圖1 等離子體對翼型流動控制布局示意圖Fig.1 Plasma flow control on airfoil layout form
1.2 PIV測量系統(tǒng)
PIV試驗原理如圖2所示,PIV系統(tǒng)由激光器、CCD相機、同步器、發(fā)煙器、控制和分析軟件、計算機等組成。
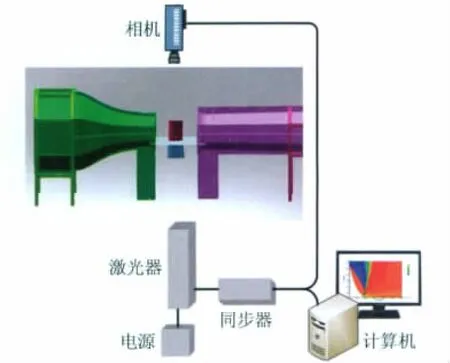
圖2 PIV測量系統(tǒng)布局圖Fig.2 Sketch map of the PIV system
激光器光源為脈沖式雙Nd:Yag激光器,每個脈沖能量為120mJ,脈沖寬度為9ns,兩激光器脈沖間隔可調(diào)整;相機為RS-170式互/自相關(guān)CCD,其分辨率為1024pixel×1024pixel,采集速度為30f/s;控制和分析軟件為TSI公司的Insight 3.0;發(fā)煙器為ROSCO1700型粒子發(fā)生器,示蹤粒子原料為橄欖油。
1.3 風(fēng)洞
風(fēng)洞為下吹式開口直流風(fēng)洞,主要由收縮段、擴(kuò)散段、駐室、風(fēng)機等部分組成,風(fēng)洞主體由玻璃鋼制造,最高風(fēng)速53m/s。試驗段尺寸為:700mm×700mm×1050mm,風(fēng)洞全長約11.5m。
1.4 電源
多相位電源主要由多相位信號發(fā)生器、SPWM正弦波調(diào)制器、多相位信號功率放大器和升壓變壓器等部分組成。輸出電壓有8個相位,每個相位相差45°。本次試驗采用單相位,輸出電壓0~5kVrms連續(xù)可調(diào),輸出頻率0.1~6kHz連續(xù)可調(diào)。
1.5 模型
試驗翼型為NACA0015翼型,弦長100mm,展長480mm,材料為金屬鋁。在翼型表面粘貼聚酰亞胺膠帶作為絕緣層,在膠帶上面布置電極,模型如圖3所示。

圖3 布置等離子體激勵器的試驗?zāi)P虵ig.3 Test airfoil with plasma actuator
2 試驗結(jié)果和分析
電極位于翼型壓力面前緣,電極寬度為2mm,電極中心線位于1%弦長處。來流風(fēng)速為20m/s。
2.1 激勵電壓的影響
為研究激勵電壓對控制效果的影響,固定激勵頻率為3.0kHz,施加的激勵電壓分別為1.2、1.6、2.0、2.4、2.8、3.2、3.6和4.0kV。
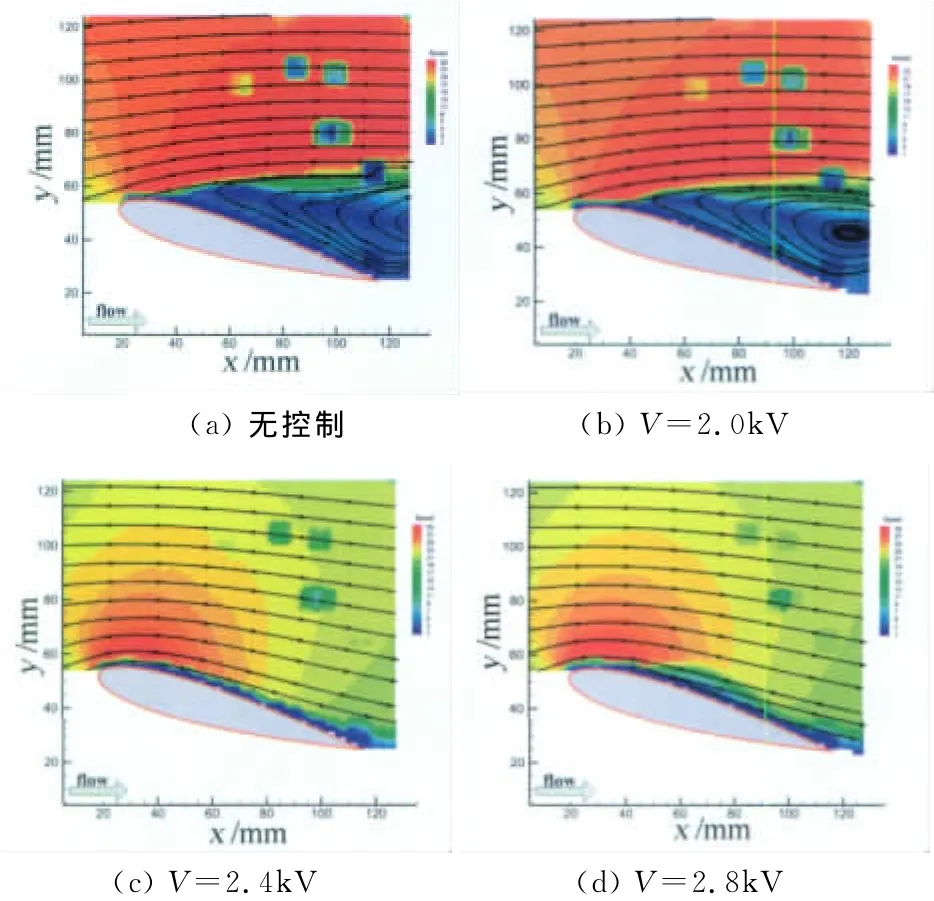
圖4 α=16°不同電壓控制下的速度流線圖Fig.4 The results with different forcing voltages(α=16°)
當(dāng)α=16°時,未加控制時翼型上表面出現(xiàn)大面積分離,如圖4(a)所示;激勵電壓為1.2和1.6kV 時,分離不能得到有效抑制,基本上無控制效果;激勵電壓為2.0kV時,如圖4(b)所示,渦心位置前移,但是分離區(qū)無明顯減小;由圖4(c)可知,激勵電壓為2.4kV時,流線基本重附在翼型表面,分離旋渦消失,分離得到有效抑制;激勵電壓進(jìn)一步增大,當(dāng)電壓為2.8、3.2、3.6和4.0kV 時(激勵電壓為2.8kV 時的控制效果如圖4(d)所示),控制效果與電壓為2.4kV時的控制效果相當(dāng)。由此可見,α=16°,激勵頻率為3.0kHz時,激勵電壓在2.4kV附近存在一個閾值,當(dāng)電壓小于閾值時,無控制效果或控制效果不明顯;當(dāng)電壓大于閾值時,控制效果顯著,電壓繼續(xù)增加,控制效果無進(jìn)一步改善。
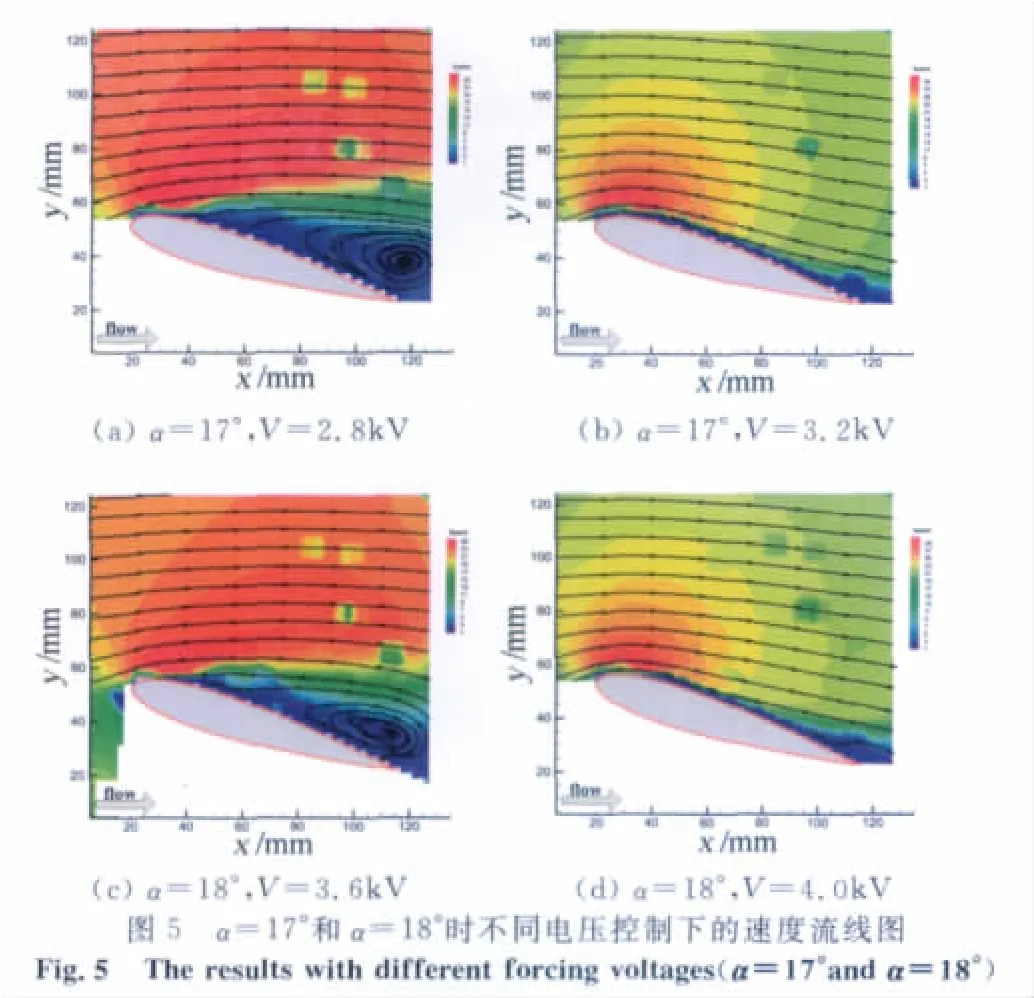
由圖5可知,α=17°時電壓閾值為3.2kV,α=18°時電壓閾值為4.0kV,不同迎角電壓閾值不同,迎角越大,氣流分離越嚴(yán)重,需要的控制強度也越大,因此閾值也越高。
2.2 控制效果隨時間歷程變化特性
圖6為α=16°,激勵電壓為2.4kV、激勵頻率為3.0kHz時,施加控制后流場隨時間歷程的變化特性。由圖可知,施加控制的瞬間(t=1/15s),流線附著在翼型表面,氣流基本上無分離。t=2/15s時,雖然大面積分離消失,但是翼型表面還有輕微的分離;t=7/15s、2/3s時,翼型出現(xiàn)大面積分離,分離未得到有效抑制;t=11/15s時,流線基本重附在翼型表面,分離得到有效抑制;t=7/5s時,翼型前緣分離得到抑制,分離區(qū)域減小,但在翼型后緣出現(xiàn)旋渦,分離未得到完全控制;t=28/15s時,翼型出現(xiàn)大面積分離,控制失效;t=29/15s、2s、31/15s時,流線附著在翼型表面,分離得到完全控制。施加等離子體激勵后,控制首先經(jīng)過一個不穩(wěn)定的過程,然后達(dá)到穩(wěn)定有效;α=16°,激勵電壓為2.4kV、激勵頻率為3.0kHz時,等離子體控制從施加到穩(wěn)定有效,大約需要2s。
翼型前緣上表面(30.1,62.2mm)位置處(如圖6(j)所示)的x向速度和y向速度隨時間的變化如圖7所示。由圖可知,未施加控制時,x向速度在22m/s附近波動,施加控制后,x向速度有了顯著的增加,在27m/s附近波動,經(jīng)歷大約2s后,基本維持在30m/s。x向速度隨時間的變化與流線隨時間變化規(guī)律一致,未加控制時,氣流分離最嚴(yán)重,速度也最小;施加控制后速度經(jīng)歷一個不穩(wěn)定的過程,大約2s后,維持在最大值附近。施加控制后y向速度有了顯著的減小,變化規(guī)律與x向速度相似。
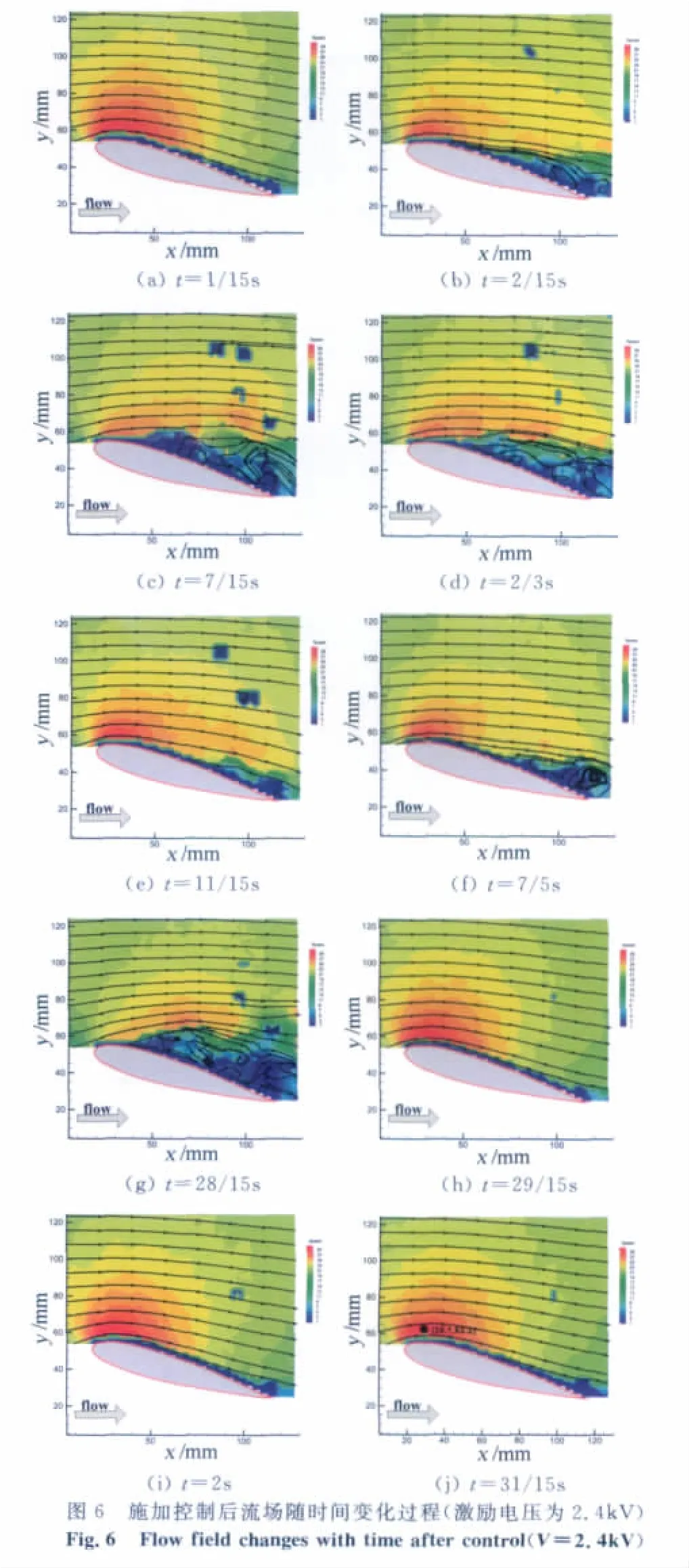
圖8為α=16°,激勵電壓為2.8kV、激勵頻率為3.0kHz時,施加控制后流場隨時間的變化過程。施加控制的瞬間(t=1/15s),翼型的大面積分離消失,流線基本重附在翼型表面,控制效果十分顯著,控制過程中,未出現(xiàn)控制不穩(wěn)定現(xiàn)象。
α=16°,激勵電壓為2.8kV、激勵頻率為3.0kHz時,翼型前緣上表面(30.1,62.2mm)位置處(如圖6(j)所示)的x向速度和y向速度隨時間的變化如圖9所示。由圖可知,施加控制后,x向速度基本維持在30m/s,y向速度基本維持在0.5m/s,隨著時間的增加,速度未出現(xiàn)激勵電壓為2.4kV時那樣大的波動。
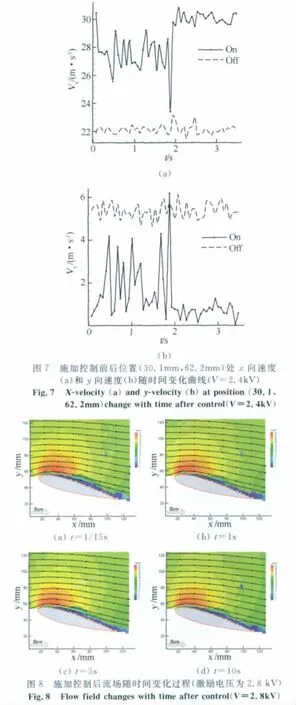
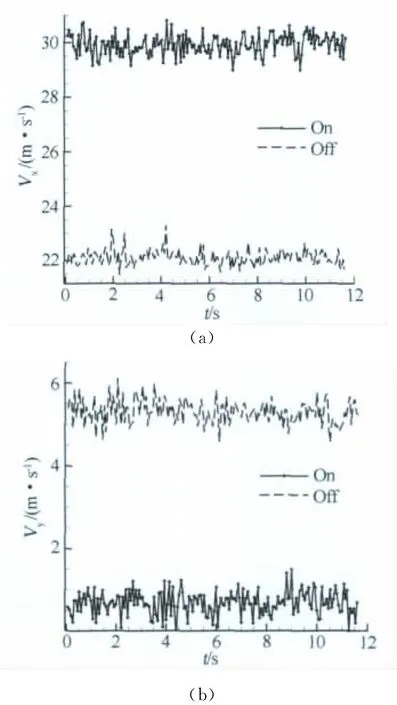
圖9 施加控制前后位置(30.1,62.2mm)處x向速度(a)和y向速度(b)隨時間變化曲線(V=2.8kV)Fig.9 X-velocity(a)and y-velocity(b)at position(30.1,62.2mm)change with time after control(V=2.8kV)
激勵電壓接近閾值時,施加控制的瞬間,等離子體的產(chǎn)生對氣流產(chǎn)生一定的沖擊作用,控制效果比較明顯;等離子體產(chǎn)生后,在流場的非定常變化和離子遷移過程中,激勵電壓不足以把等離子體維持在一個穩(wěn)定的狀態(tài),控制效果在一定時間內(nèi)呈現(xiàn)出不穩(wěn)定性;經(jīng)過一段時間后,離子累積到一定密度,基本達(dá)到平衡,控制效果達(dá)到相對穩(wěn)定的狀態(tài)。當(dāng)激勵電壓大于閾值時,等離子體一直維持在比較穩(wěn)定的狀態(tài),施加控制的強度足夠大,流動控制呈現(xiàn)穩(wěn)定狀態(tài)。激勵電壓越高,控制越穩(wěn)定有效,消耗的功率也越大。
3 結(jié) 論
通過PIV試驗,研究了來流風(fēng)速為20m/s時,等離子體對翼型流動分離控制的特性。研究結(jié)果表明:激勵電壓存在一個閾值,不同迎角電壓閾值不同,迎角越大,氣流分離越嚴(yán)重,需要的控制強度也越大,因此閾值也越高。當(dāng)電壓小于閾值時,控制無效或效果不明顯;當(dāng)電壓接近閾值時,控制表現(xiàn)出不穩(wěn)定性并最終趨于穩(wěn)定;當(dāng)電壓大于閾值時,控制效果穩(wěn)定 有效,氣流能夠很好地重附在翼型表面。施加控制后,翼型前緣上表面x向速度顯著增加,y向速度顯著減小,減小了逆壓梯度,實現(xiàn)了流動分離的有效控制。
[1]ROTH J R,SHERMAN D M,WILKINSON S P.Boundary layer flow control with a one atmosphere uniform glow discharge surface plasma[R].AIAA 1998-0328.
[2]CORKE T C,POST M L.Overview of plasma flow control:concepts,optimization,and applications[R].AIAA 2005-0563.
[3]PATEL M P,NG T T,CORKE T C.Plasma actuators for hingeless aerodynamic control of an unmanned air vehicle[R].AIAA 2006-3495.
[4]HE C,CORKE T C,PATEL M P.Plasma flaps and slats:an application of weakly ionized plasma actuators[J].Journal of Aircraft,2009,46(3):864-873
[5]GRUNDMANN S,F(xiàn)REY M,TROPEA C.Unmanned aerial vehicle(UAV)with plasma actuators for separation control[R].AIAA 2009-698.
[6]SOSA R,MOREAU E,TOUCHARD G,et al.Stall control at high angle of attack with periodically excited EHD actuators[R].AIAA 2004-2738.
[7]張攀峰,王晉軍,施威毅,等.等離子體激勵低速分離流動控制實驗研究[J].實驗流體力學(xué),2007,21(2):35-39.
[8]李應(yīng)紅,吳云,張樸,等.等離子體激勵抑制翼型失速分離的實驗研究[J].空氣動力學(xué)學(xué)報,2008,26(3):372-377.
[9]周小旭,鐘誠文,李凱,等.等離子體EHD順電加速效應(yīng)影響因素實驗研究[J].實驗力學(xué),2010,25(3):286-292.

黃 勇(1973-),男,四川德陽人,副研究員。研究方向:流動控制和動力模擬。通信地址:四川綿陽中國空氣動力研究與發(fā)展中心(621000)。 聯(lián) 系 電 話:0816-2461241。E-mail:dragonhy@163.com
PIV measurement on airfoil flow separation control course by plasma actuation
HUANG Yong,WANG Wan-bo,HUANG Zong-bo,ZHANG Xin,WANG Xun-nian,SHEN Zhi-h(huán)ong
(China Aerodynamics Research and Development Center,Mianyang Sichuan 621000,China)
Particle Image Velocimetry(PIV)technology was applied to investigate the flow separation control around the NACA0015airfoil by dielectric barrier discharge(DBD)plasma actuator.The wind tunnel test was carried out to investigate the forcing voltage and the character of flow separation control effect changing with time.The results showed that there was threshold value of actuator voltage.When the voltage was lower than the threshold value,the control was effectless or the control was not visible.When the voltage was near the threshold value,the control effect was unsteady and finally went steady.When the voltage was higher than the threshold value,the control was prominent and steady and flow separation could reattach to the airfoil suction surface very well.
DBD;plasma;flow control;PIV;wind tunnel test
V211.73
A
1672-9897(2011)06-0023-05
2011-04-25;
2011-08-17
猜你喜歡
中老年保健(2021年12期)2021-11-30 02:58:01
好日子(2021年8期)2021-11-04 09:02:46
小學(xué)生學(xué)習(xí)指導(dǎo)(爆笑校園)(2020年6期)2020-07-03 10:01:10
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
攝影之友(影像視覺)(2018年12期)2019-01-28 09:01:02
攝影之友(影像視覺)(2018年12期)2019-01-28 09:01:02
中華詩詞(2018年11期)2018-03-26 06:41:34
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級)(2017年11期)2017-10-23 01:32:36
Coco薇(2016年8期)2016-10-09 02:11:50
中國醫(yī)藥科學(xué)(2015年19期)2015-02-27 12:33:11
