水電機組智能盤車系統關鍵技術探討與實踐
2011-07-02 01:14:03孟安波劉秀良徐海波蔣曉明
自動化與信息工程 2011年2期
孟安波劉秀良徐海波蔣曉明
(1.廣東工業大學 2.甘肅電力科學研究院3.廣東省現代電力電子工程技術中心 4.廣東省科學院自動化工程研制中心)
水電機組智能盤車系統關鍵技術探討與實踐
孟安波1劉秀良2徐海波3蔣曉明4
(1.廣東工業大學 2.甘肅電力科學研究院3.廣東省現代電力電子工程技術中心 4.廣東省科學院自動化工程研制中心)
傳統盤車方法存在布點數量小、停點不準確、讀數主觀性強、盤車耗時長等問題,因此迫切需要開發一種通用性強、效率高、精度高、智能性強的全自動智能盤車系統,本文對其相關關鍵技術進行了深入有效的探討,在此基礎上,提出了相應的解決方法與方案。通過現場試驗,驗證了所提出解決方案的有效性與可行性。
水電機組;智能盤車;相位識別
1 引言
在水電廠盤車領域,國內絕大多數水電機組采用的都是傳統的8點等角盤車方法[1],即在每個典型測量部位,將圓周統一等分為8點,并按順時針方向依次編號,盤車時依次在每個軸號處停留,讀取主軸在各典型部位各軸號處的百分表讀數,然后描點計算各典型部位的最大擺度和方位。但這種方法與技術人員的業務水平和現場經驗有很大關系,計算結果往往不一致,以至盤車擺度的大小及方位都不太準確,直接影響了下一步主要旋轉部件尋找中心及軸線處理量的大小和方向確定。在計算機及光電傳感器測量技術飛速發展的今天,這些測量方法在一定程度上阻礙并制約了水電安裝質量的提升。具體表現在:一是傳統測量方法效率低,如用百分表測量機組各轉動部分擺度時,需要在每個測量位置設置人工監視百分表的變化;二是傳統測量方法可信度相對較低,同是一塊百分表,每個人測量出的數據往往存在或多或少的差異;三是傳統測量方法測點較少,由于采用的百分表讀數,目前盤車的測點一般都是等角8點,測量結果顯得有些粗糙;四是傳統測量方法停點不準,目前的盤車工具往往難以控制轉速,停點要么超前,要么滯后,從而導致測數不準,致使測得的數據誤差大。另外,從盤車數據處理方法上來看,目前國內外采用的方法主要有:一是盤車數據手工描圖,二是采用最小二乘法對數據進行擬合分析處理。但它們的基礎都是基于等相位8點或16點盤車數據,對于任意相位、任意點數的盤車數據,往往顯得無能為力或者計算過于復雜[2]。
縱觀目前國內外盤車技術的現狀,盤車方式必然朝著自動化、智能化方向發展。隨著傳感器技術與計算機技術的日益成熟,盤車方法也必然摒棄過去傳統的等轉角8點盤車模式,盤車過程應該是連續過程,被測點數不受限制,也不需要停留在被測部位,而且盤車過程應該與盤車點數、相位以及盤車旋轉速度無關,這就大大節省了盤車時間,同時還可以顯著提高測量精度。由于自動盤車方法與傳統方法有了質的飛躍,因此有必要研究一種新的數據處理,以便能夠分析任意點數、任意相位的盤車數據。針對傳統盤車技術已無法滿足機組特別是大型機組安裝質量要求,本文提出了一種全新的全自動智能盤車系統,并詳細介紹其關鍵技術及解決措施。目前該系統已被成功開發出來,并開始投運在水電廠的盤車過程中,取得了良好的經濟效益。
2 全自動智能盤車系統特點
全自動智能盤車系統雖然沒有特定的定義,但是本文認為它至少具備以下幾個方面特征:
(1) 適應于任意測點任意軸位盤車
由于傳統等角盤車方法往往存在對位不精準的缺點,特別是對于全自動連續盤車采樣過程,軸的轉速不能保證完全勻速旋轉。因此,全自動智能盤車系統必須滿足任意轉角任意軸位盤車的客觀需要。這就需要解決測點軸位定位的關鍵問題。
(2) 適應手動或自動、單獨或整體盤車
全自動智能盤車系統除了滿足自動盤車需要,其智能性還應該體現在:① 與盤車方式無關,即適應于手動也適應于自動;② 與盤車部位無關,即能夠適應于單獨或整體盤車;③ 與旋轉軸轉速無關,即能夠適應于任意軸位測點盤車。
(3) 適應于連續采樣數據正弦濾波要求
水電機組盤車時旋轉軸的擺度特性在理論上應該遵循一條正弦曲線,其擺度曲線的規律性不受盤車方式的影響。由于采樣過程往往受到外界干擾,因此全自動智能盤車系統必須具備對連續采樣數據正弦濾波的能力。
3 全自動智能盤車系統關鍵技術及解決方案
3.1 盤車動力裝置
傳統的盤車動力裝置多采用手動盤車、機械盤車或是電磁動力盤車,它們共同的缺點有:測數不準,無法一步調整到位,造成反復、無效勞動多;勞動強度大、工作效率低;現場布置繁雜,安全生產與勞動質量不能保證等問題。解決的方案是采用自動盤車裝置,自動盤車裝置能夠使轉子完全處于懸吊的自由狀態,消除了因軸系折線而產生超負荷驅動的問題,同時保證了軸向、徑向無干擾。因此能夠大大改善盤車條件,為連續自動盤車提供了必要的基礎條件。
3.2 相位識別
由于全自動智能盤車系統屬于任意轉角、任意點數的連續或斷續盤車方式,采樣點非常多且不能保證轉角均勻,為計算被測部位最大擺度方位角,需要一種相位鑒別技術來確定采樣點的相位。另外初始相位如何確定也一直是影響全自動智能盤車系統的一個重要關鍵因素。對第一個問題,可采用在旋轉軸上沿圓周等距離布置若干光帶紙(一般16條光帶就可以滿足精度要求),然后配合光電傳感器與測量擺度的渦流傳感器同步采樣,就可以解決測點的軸位問題。雖然軸速不能保證均勻,但是由于光帶點比較密集,把光帶點之間的擺度測點做近似等距離處理并不會造成很大誤差。對于第二個問題,可在布置的光帶紙中任選一條,然后在鄰近處多貼一條相同的光帶紙,即可巧妙地判斷測點的初始相位。
3.3 盤車數據處理
從盤車數據處理方法上來看,目前國內外采用的方法主要有:一是盤車數據手工描圖,二是采用最小二乘法對數據進行擬合分析處理。但它們都是對8點等相位盤車數據進行處理,而對于任意相位、任意點數的盤車數據,它們就顯得無能為力。無論是哪種盤車工具,盤車過程都不能保證轉速均勻,因此測點軸號間的相位并不是等角。綜合上述,全自動智能盤車系統需要提供一種全新的智能盤車核心算法。基于盤車擺度理論上是正弦曲線的事實,可采用遺傳算法的正弦擬合方法[3-4],以滿足本全自動智能盤車系統任意轉角、任意點數的連續盤車的需要。
3.4 多通道并行采集
盤車涉及到水輪發電機組上導、下導、鏡板、法蘭、水導等測量部位,這些測量部位的采樣數據要求必須保證同步進行。傳統盤車方法是在大軸停穩后,利用對講機上下同時讀取測點所在的百分表,因此不存在同步問題。而自動盤車由于是連續采樣過程,傳統的輪循采集方式存在延時問題,因此,全自動智能盤車系統在選擇或設計采樣儀/板卡時,必須確保每個通道擁有獨立的光電隔離與AD轉換器以解決多通道并行采集問題。
3.5 軟硬件濾波
水電廠特別是地下廠房現場環境相當復雜,各類電磁干擾信號容易混進采樣系統中去,因此,必須采用合適的軟、硬件濾波技術,解決干擾信號,特別是高次諧波的問題。由于盤車一個周期往往需要數分鐘,因此擺度曲線的頻率很低,所以在硬件方面可采用低通濾波器(<0.01Hz),在軟件方面可采用小波分析或用FFT濾去高次諧波即可[5]。
3.6 實時連續顯示
由于采樣數據在系統界面的實時顯示是通過在采集卡的緩沖器中獲取,通常緩沖器的采樣深度有一定的限制,如何保證連續實時采樣顯示往往不容易。因為,一般的做法是在一個時鐘事件函數里定時到緩沖器中獲取采樣數據,然而,相鄰兩次取數存在的時間延時會導致采樣顯示的不連續性。解決的關鍵措施是在軟件系統里面再設置一個數據緩沖器,這樣就能保證一個前臺取數,一個后臺將事實連續顯示的效果。
4 應用案例
目前,已開發的全自動智能盤車系統在牡丹江鏡泊湖水電廠成功應用,取得了良好應用效果與經濟價值。圖1是2號機組上導、法蘭、水導以及光帶的實時連續采樣界面。

圖1 智能盤車并行連續數據采樣界面
從圖中可以看出,各測點的擺度數據曲線基本滿足正弦規律,但是受電磁信號干擾影響,采樣數據中混入了高次諧波。本實例中,采用FFT濾去高次諧波,同時采用遺傳算法對采樣序列進行了正弦擬合,處理后的數據如圖2所示。
由圖2便可得到法蘭、水導在X、Y方向上的凈擺度曲線(如圖3所示),由此計算出相應的最大擺度與相位。
2號機組的盤車過程加上傳感器安裝總耗時不超過兩個小時,盤車系統輸出結論應用于盤車軸線調整中取得了良好的效果。
5 結論
本文介紹了全自智能動盤車系統的特點與要求,在此基礎上,闡述了研發全自動智能盤車系統的關鍵技術問題,并給出了相應的解決措施與方案,以上成功的應用案例說明了全自動智能盤車系統具有良好的實用與推廣價值。
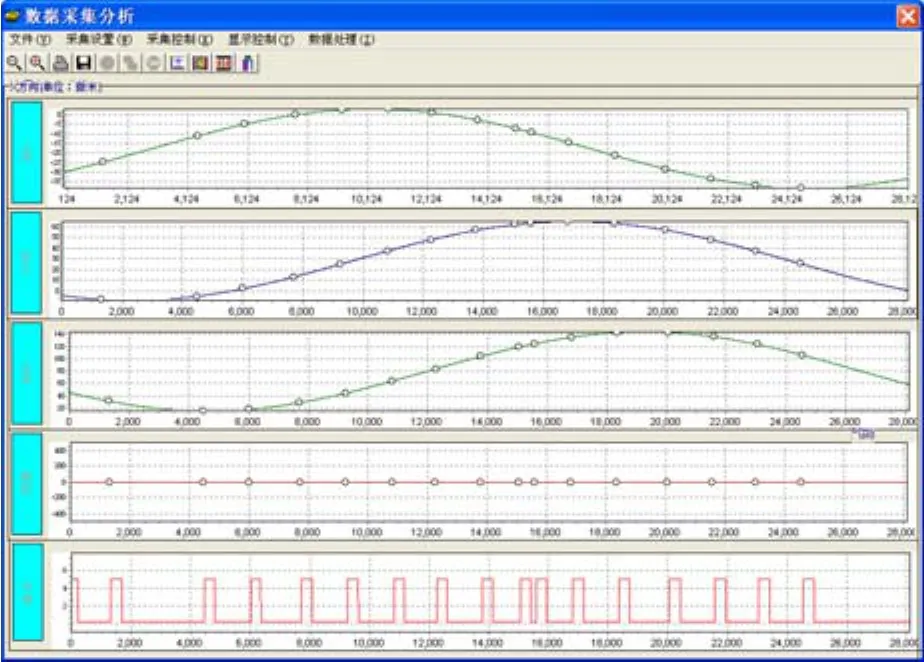
圖2 經濾波與正弦擬合后的采樣曲線
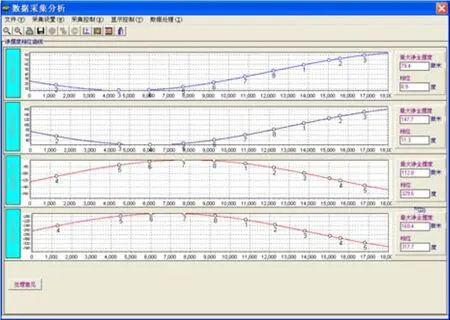
圖3 凈擺度曲線
[1] 戴昆.三峽左岸電站VGS水輪發電機組軸線調整及總裝[J].水電站機電技術,2004,27(2):1-4.
[2] 史恩澤,齊經緯.太平灣電廠多點任意角盤車軟件開發及功能介紹[J].水電站機電技術,2009,32(5):22-24.
[3] 秦世偉,潘國榮,谷川,施貴剛.基于遺傳算法的三維空間柱面擬合[J].同濟大學學報:自然科學版,2010,38(4):604-607,618.
[4] 潘道宏,任華.基于遺傳算法和最小二乘支持向量機的水位流量關系擬合[J].水利科技與經濟,2010,16(5):493-494.
[5] 任祖華.基于窗函數的FFT諧波參數估計算法[J].電測與儀表,2010,47(5):8-11,31.
The Key Technologies of Smart Barring System for Hydroelectric Generating Unit
Meng Anbo1Liu Xiuliang2Xu Haibo3Jiang Xiaoming4
(1. Automation Faculty of Guangdong University of Technology 2. Gansu Electric Power Research Institute 3. R&D Center of Guangdong Modern Power Electric & Electronic Engineering, 4. Automation Engineering R&M Center of Guangdong Academy of Sciences)
The traditional barring method exists such problems as small acquisition points, inaccurate stop, subjective reading and time-consuming barring process. It is essential to develop a smart barring system with such features as high general-purpose, high efficiency, high precision, and strong intelligence. In this paper, the related key technologies for smart barring system are discussed. Its corresponding solutions and measures are proposed. Through the field test, the feasibility and reasonability of the solutions proposed in this paper are verified.
Hydroelectric Generating Unit; Smart Barring System; Phase Detection
孟安波,男,1971年生,博士,副教授,主要研究方向:自動化、系統集成與分析。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
表面工程與再制造(2019年6期)2019-08-24 06:40:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
