UPFC 并聯側雙環控制策略的研究
2011-07-10 03:29:56劉永江康積濤張學群
浙江電力 2011年7期
劉永江,康積濤,李 林,張學群
(西南交通大學電氣學院,成都 610031)
輸配電技術
UPFC 并聯側雙環控制策略的研究
劉永江,康積濤,李 林,張學群
(西南交通大學電氣學院,成都 610031)
從統一潮流控制器(UPFC)并聯側系統數學模型出發, 設計了 UPFC 并聯側雙環控制系統, 內環用電流解耦控制器實現 dq 軸電流解耦, 外環用 d 軸控制直流電容電壓, q 軸控制節點電壓的 PI控制方式,同時加入電流前饋控制環節和電流反饋控制環節,提高了系統精度和響應速度。仿真系統采用高電壓等級,并使用標幺值方法分析和計算各類控制器的參數,通過仿真驗證了所設計系統的準確性和有效性。
UPFC;電流; 前饋;反饋
隨著電力電子器件和微型計算機的發展,柔性交流 輸電 (FACTS)技 術[1-2]在 電力系統 中 的 應用日漸廣泛。 UPFC 作為當前 FACTS 家族中功能最強的一員,引起很多學者關注和研究。用現代控 制 理 論[3-4]、 非線 性控制[5-7]、神經 網 絡[8]、人工智 能[9]、 自 適 應 模 糊控 制[10]實 現 的 控 制 器 在 物 理裝置上結構復雜,現階段很少有關此類控制器運用 的 實 例, 沿 用 傳 統的 PI 控 制 器[10-14]仍 具 有 充分的可行性和實用性。 提出在 UPFC 并聯側采用雙環控制[13-14], 在常規 PI控制之外添加電流反饋和電流前饋環節的控制策略,同時引入標幺值計算控制器參數,最后通過仿真實驗觀察所提出的控制系統的合理性。
1 UPFC 模型
圖1 是 UPFC 的原理框圖。 UPFC 加在線路節點 i, j之間, i′, j′表示虛擬母線節點, 并聯逆變器和串聯逆變器分別通過 T1與 T2已 2 臺變壓器接入線路中。并聯側逆變器通過調節并聯支路無功電流的大小控制注入系統的無功功率,維持并聯節點電壓的穩定,同時通過調節并聯支路有功電流來平衡 UPFC 所消耗以及串聯逆變器所吸收的有功功率,以維持直流電容電壓恒定。串聯側逆變器通過調節串接在線路上的等效電壓源的大小和相位,改變線路的有功和無功功率的流動,以達到控制潮流的目的。
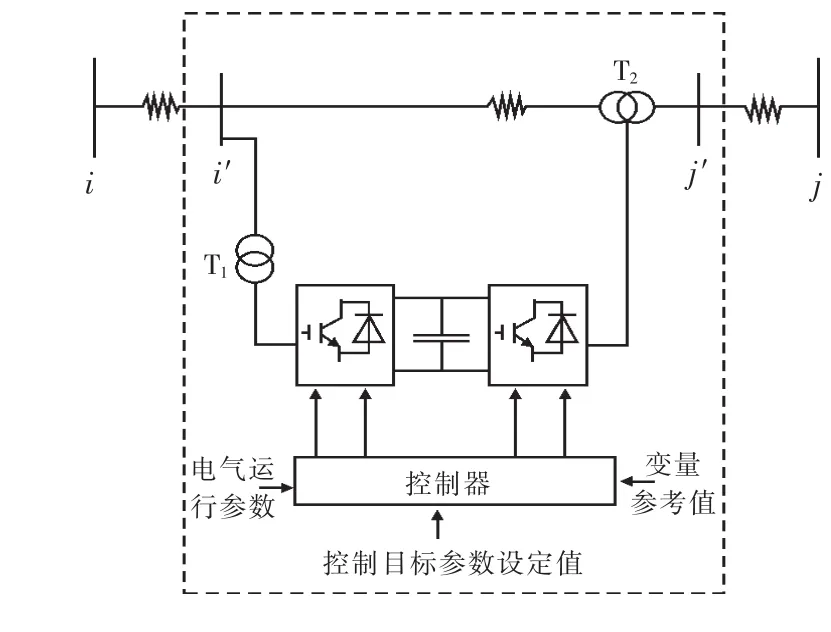
圖1 UPFC 原理圖
圖2 是 UPFC 并 聯 側 的 電 路 圖 , Sabc表 示 開關函數, 三相橋采用 IGBT, Va, Vb,Vc表示 UPFC 并聯點三相電壓源, L1, R1是濾波等效電抗、電阻,Ia,Ib,Ic是并聯支路三相注入電流,ua,ub,uc是并聯逆變器三相輸出電壓, C 是直流電容,Udc是直流電容電壓, RL是等效負荷電阻。
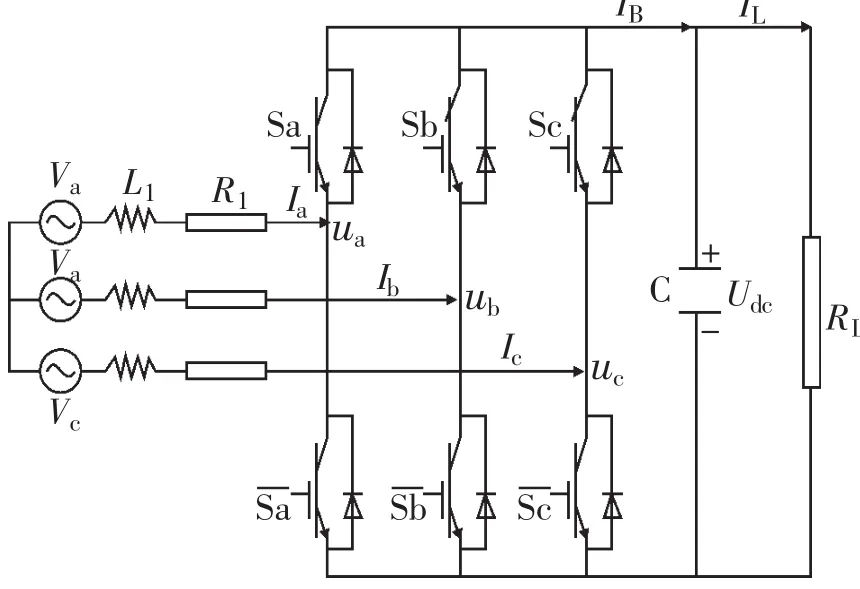
圖2 UPFC 并聯側電路圖
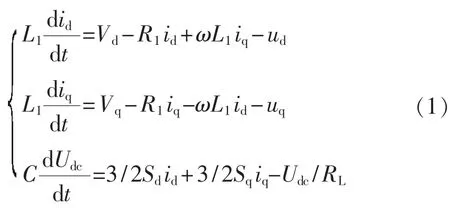
根據圖2, 以 UPFC 并聯節點電壓相位為參考, 將三相系統轉化為 dq同步坐標系統, 數學模型可描述為:式中:ω為角頻率。
根據式(1)構建 UPFC 并聯側的 s 域數學模型如圖3所示。
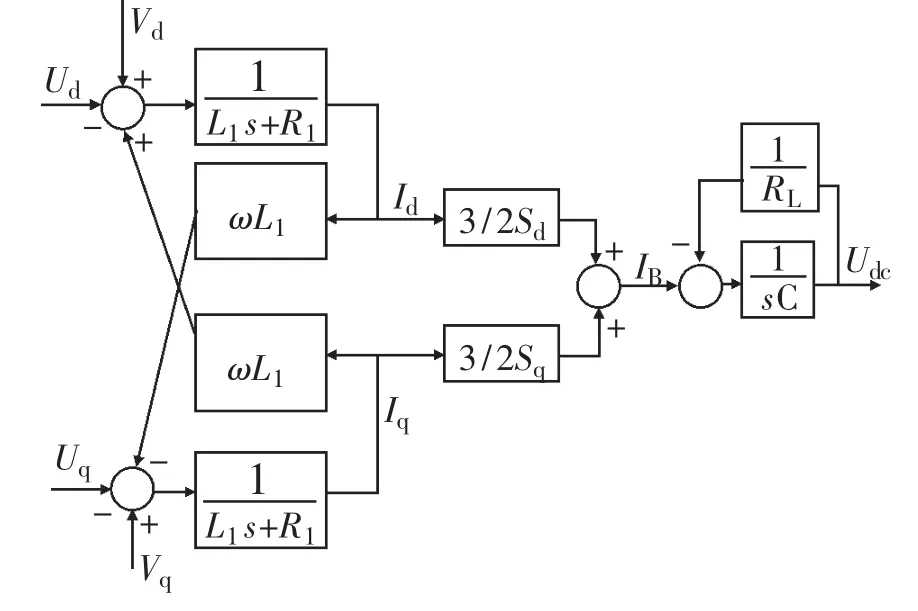
圖3 UPFC 并聯側數學模型
2 電流控制器的設計
在傳統 UPFC 的并聯側控制中, 用 Id控制電容電壓 Udc,Iq控制節點電壓幅值 V。 由于 d,q 軸電流存在耦合對控制不利,需設計1個電流解耦控制器,如式(2)所示:
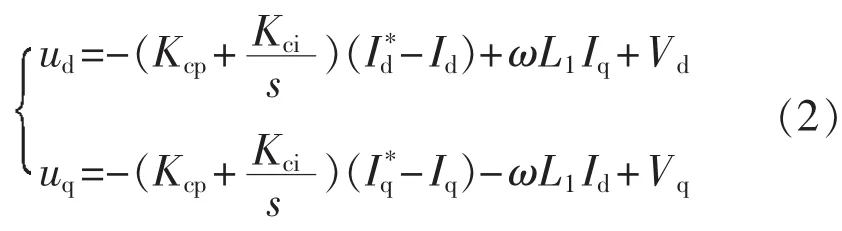
式 中 : Kcp與 Kci分 別 表 示 PI 控 制 器 的 比 例 和 積分 常 數 ; Id*與 Iq*為 電 流 指 令 值 。
圖4是電流解耦控制器的數學模型,作為雙環控制系統中的內環控制,電流解耦后為準確控制直流電容電壓和并聯節點電壓提供了可靠保證。
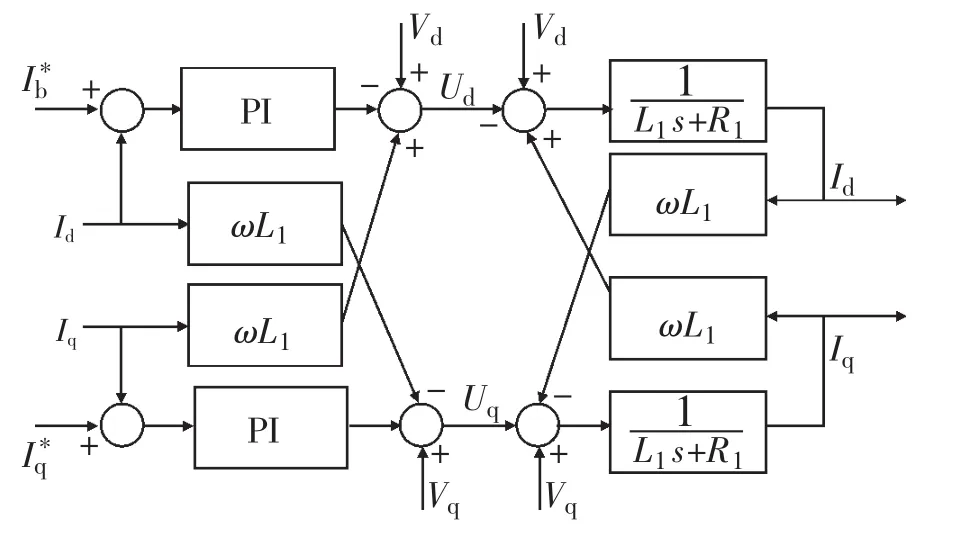
圖4 電流解耦
由圖4 可以看出, dq 軸電流均采用 PI控制方式,為了與實際情況接近,在電流通道上加上濾波環節和脈寬調制(PWM)逆變放大環節。 其中Kf是濾波放大倍數, Tf為濾波延遲時間, KPWM為PWM 逆變器放大倍數, TPWM為 PWM 逆變延遲時間 ,KR=1/R1,TR=L1/R1,tcp=Kcp/Kci,傳 遞 函 數如圖5所示。
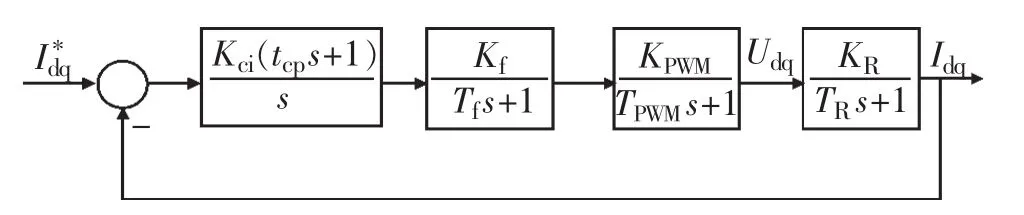
圖5 電流控制器
開環傳遞函數為:

令 tcp=TR, Tf, TPWM都 很 小 , 令 Ts=Tf+TPWM,式(3)可簡化為:

令 K=KciKpKPWMKR, 這是 1 個典型的二階環節,閉環函數為:

3 直流側電容控制器的設計
圖6是直流電容控制系統,加入了電流前饋環節。通過分析計算可得輸入d軸電流和輸出直流電壓的傳遞函數:

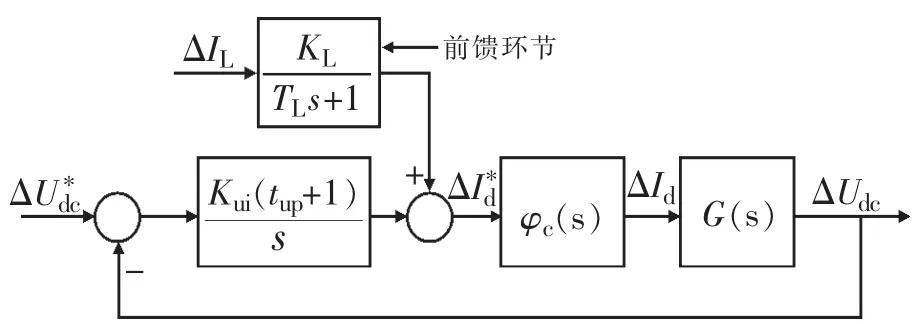
圖6 直流電容電壓控制器
該控制器采用 PI 控制, tup=Kup/Kui, Kup與 Kui分別表示 PI控制器的比例和積分常數。 令 KRB= 2/3RLB, TRB=2RLBCdc, φc(s) 可 簡 化 為 一 節 慣 性環節 1/(2Ts+1), 在未加 PI控制器前待校正系統的開環傳遞函數為:

由于 TRB?Ts,

按三階最佳整定得到:
Kui=1/(16KRB/TRBTs);tup=8Ts。
加入前饋器使得直流電容電壓響應速度加快,超調量減小,調節精度提高。當電容上電壓穩定時,電容支路不參與有功傳輸。
4 節點電壓控制器的設計
圖7是節點電壓控制系統傳遞函數,加入了電流反饋環節。

圖7 并聯節點電壓控制器
通過分析計算可得輸入q軸電流和節點電壓的傳遞函數:

對式(9)進行波特圖分析, 見圖8。
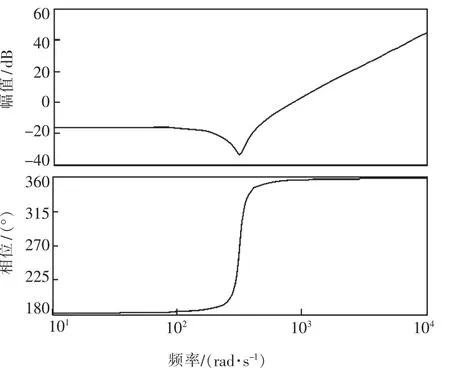
圖8 GV(s)的波特圖
由圖8 中可見, 諧 振頻率約為 329 rad/s;在諧振頻率點前,傳遞函數表現為比例特性;在諧振頻率點后,表現為二階微分特性。根據實際情況,輸入信號一般為低頻信號,所以暫且不考慮其高頻段的特征,取其低頻段的特性:

但應注意,在設計節點電壓控制器時,應使得閉環函數的諧振頻率遠低于 329 rad/s。且在不同系統參數條件下,分析的結果不一樣,應根據具體情況分析和整定控制器參數。
采 用 PI 控 制 器 調 節 節 點 電 壓 幅 值 ,tvp=Kvp/ Kvi, Kvp與 Kvi分 別 表 示 PI 控 制 器 的 比 例 和 積 分常數。不考慮電流反饋環節時,控制系統是一個典型的二階環節, 按最佳二階整定 PI參數。 電流反饋環節可減小節點電壓波動時對控制系統的影響, 加快響應速度。 Kv=IC/ΔV, IC表示并聯節點輸出的最大容性電流,為對應此時下降的節點電壓。 Tv為時間常數, 一般取 0.05~0.15 s。
5 仿真實驗
5.1 仿真系統
圖9 為 UPFC 并聯側仿真電路圖, RLoad與 LLoad為線路有功和無功負荷; R1與 R2為并聯側有功負荷。 直流電容電壓為 40 kV, 采用 SVPWM 調制技術 , 開 關 頻 率 為 2 kHz, RLoad=100 Ω, LLoad=0.5 H,R1=1 000 Ω, R2=200 Ω。 表1 給出了仿真實驗模型的電氣參數,表2給出了各個控制器的參數。
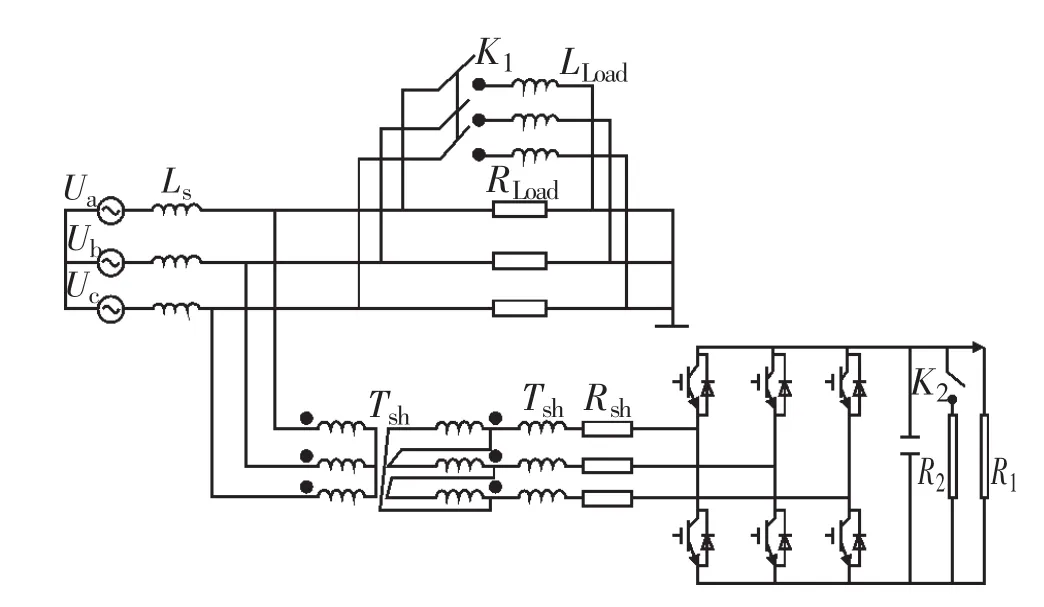
圖9 仿真實驗模型
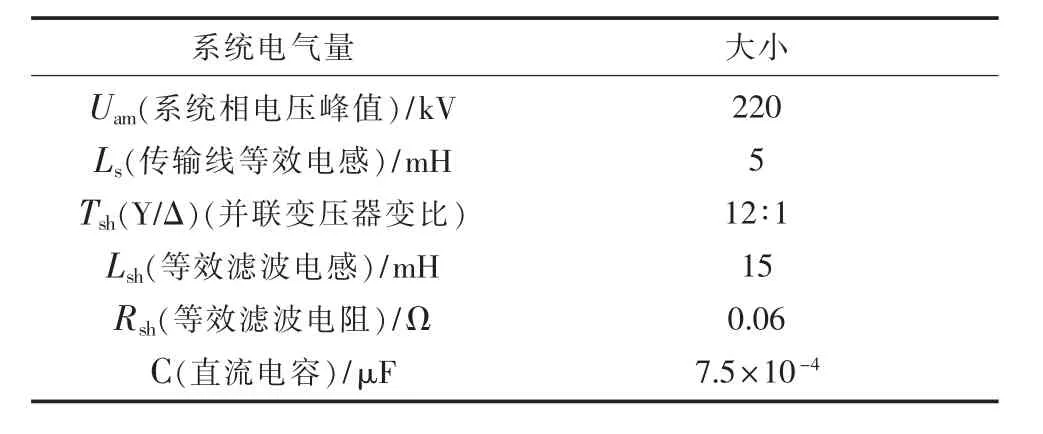
表1 UPFC 并聯側電路參數

表2 控制器參數
5.2 線路投切LLoad時控制對象的變化
在 0.3 s 時合上開關 K1, 0.5 s 時斷開, 如圖10所示,并聯節點處電壓有一定幅度的下降, 但仍 保 持 在 0.977pu, 下 降 幅 度 約 為 2.5% , 當 斷 開開關后,電壓又恢復到原來水平。 圖11說明直流電容在仿真開始時有一定的波動,但超調量不大, 在投切 LLoad時也出現小的波動, 但總體穩定。
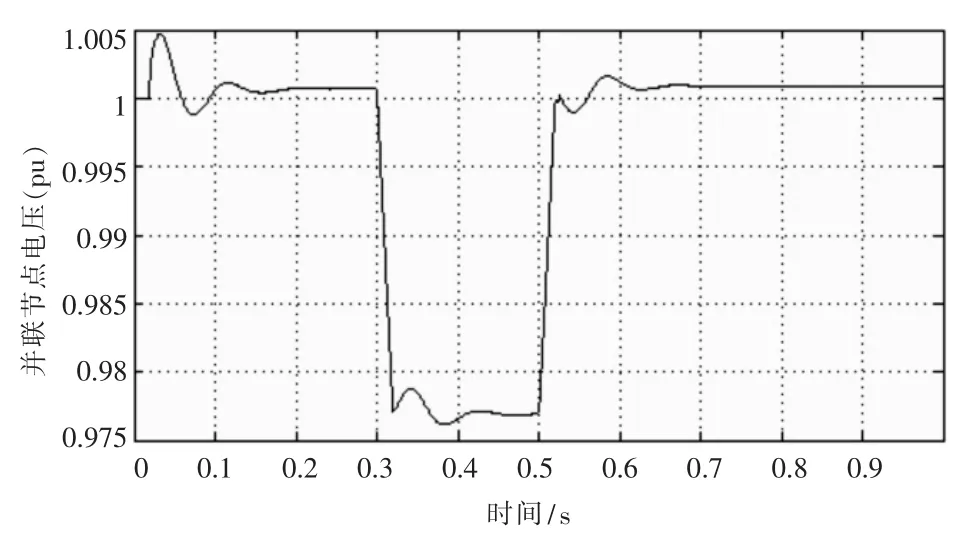
圖10 投切 LLoad時并 聯節點電 壓
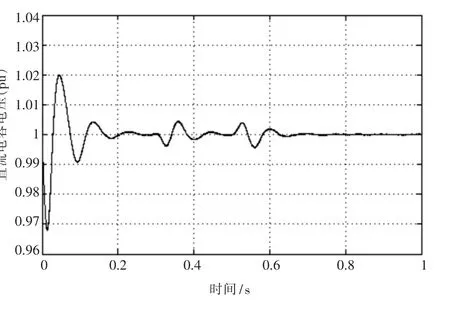
圖11 投切 LLoad時直 流電容電 壓
圖12是未加電流反饋校正環節和電流前饋校正環節時直流電壓的波形,很顯然,電流反饋環節對穩定直流電容電壓意義很大,電流前饋校正可以減小階躍響應時的超調量,使調節時間也同樣減少。
5.3 并聯側投入 R2時控制對象的變化
在 0.5 s 時合上開關, 從圖13 可以看出, 投切R2不會對并聯節點電壓造成太大影響, 節點電壓基本平穩。 圖14可以說明,在并聯側電阻變化時直流電容電壓發生了一定的波動,經過短時間的震蕩之后可以穩定下來。
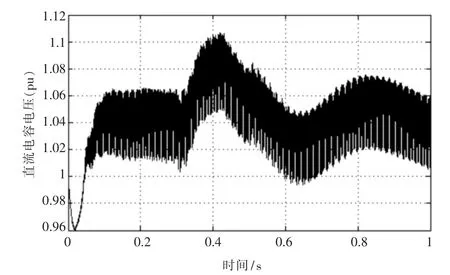
圖12 未加電流反饋環節時直流電容電壓
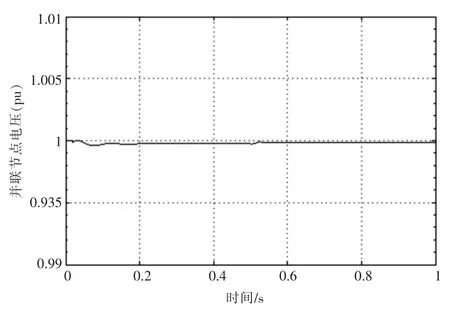
圖13 并聯側投入 R2時并聯節點電壓
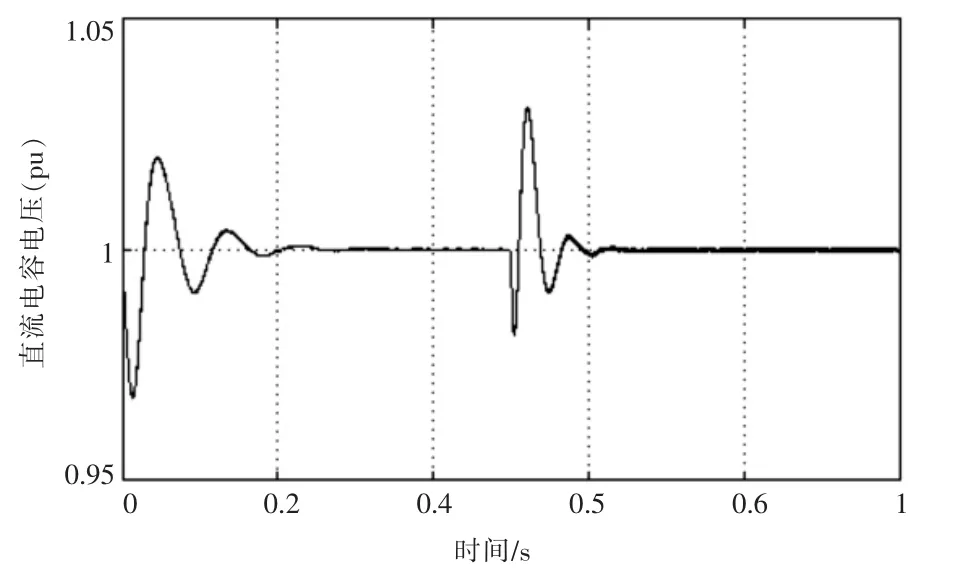
圖14 投入 R2時直流電容電
6 結語
本文提出了以傳統 PI控制方式實現的 UPFC并聯側雙環控制策略,設計了節點電壓控制器和直流電容控制器;為了達到更為理想的效果,加入了電流反饋和電流前饋環節。仿真結果證明,該控制系統具有良好的魯棒性和動態性能。
[1]王仲鴻,沈斐,吳 鐵 錚.FACTS 技 術 研 究現 狀 及 其 在 中國 的 應 用 與 發 展[J].電 力 系 統 自 動 化 ,2000(12)∶1-5.
[2]王 寶 華 , 楊 成 梧 .FACTS 穩 定 控 制 策 略 綜 述[J].電 力 自動化設備,2000,20(2)∶50-53.
[3]SA TAHER,SAKBARI,R HEMATTI,et al.UPFC Controller Design Using QFT Method In Electric Power Systems[J].IEEE EUROCON,2009∶1005-1013.
[4]王海風,李敏,陳珩.統一潮流控制器的多變量控制設計[J].中國電機工程學報,2000,20(8)∶51-55.
[5]王錫凡,方萬良,杜正春.現代電力系統分析[M].北京:科學出版社,2003.
[6]ZIWEN YAO,NICOLAS LECHEVIN.Issues onNonlinear Control of Voltage Source FACTS[J].Devices Proceedings of the 2005 IEEE Conference on Control Applications Canad, 2005∶1317-1324.
[7]謝樺,梅生偉,徐政,等.統一潮流控制器的非線性控制和對電力系統穩定性的改善[J].電力系統自動化,2001(10)∶1-5.
[8]杜文娟,秦川,王 海 風,等.UPFC 控 制 的協 調設 計——變參數開環解耦控制方法[J].電力系統自動化 2008,32(8)∶19-24.
[9]陳眾,顏偉,徐國禹,等.統一潮流控制器的智能解耦與結 構 設 計 研 究[J].電 網 技 術 ,2004,28(2)∶23-28.
[10]鞠 儒 生 , 陳 寶 賢 , 邱 曉 剛 .UPFC 控 制 方 法 研 究[J].中 國電機工程學報,2003,23(6)∶60-65.
[11]黃振宇,刁勤華.統一潮流控制器的控制系統分析及控制 策 略 設 計[J].電 網 技 術 ,1999,23(7)∶3-9.
[12]蔡松,段善旭,蔡禮.基于交叉耦合與交叉解耦的 UPFC控 制 性 能 對 比[J].電 力 自 動 化 設 備 ,2007,27(5)∶45-50.[13]王久和,尹虹仁,張金龍,等.采用功率內環和電壓平方外環的電壓型 PWM 整流器[J].北京科技大學學報,2008, 30(1)∶90-95.
[14]董 德 智 ,宋 玥 .電 力 電 子 變 壓 器 能 量 雙 向 流 動 研 究[J].中國電力,2007, 40(10)∶52-56.
(本文編輯:楊 勇)
Research on Double-loop Control Strategy for Shunt Inverter of Unified Power Flow Controller
LIU Yong-jiang, KANG Ji-tao, LILin, ZHANG Xue-qun
(College of Electrical Engineering, Southwest Jiaotong University, Chengdu 610031, China)
On the basis of themathematicalmodelof unified power flow controller (UPFC) shunt inverter system, a double-loop control system of UPFC shunt inverter is designed.The dq axis current decoupling is real ized with decoupling controller for internal loop.And the proportional integral (PI) controlmode is adopted for external loop, in which the d axis controls DC capacitor voltage and q axis controls node voltage.Meanwhile,the current feedforward and feedback control links are added so as to improve the precision and response velocity of the system.The high voltage level is adopted in the simulation system, in which per unit value method is used to analyze and calculate the parameters of all kinds of controllers.The accuracy and validity of the designed system are proved through simulation.
unified power flow controller; current; feedforward; feedback
TM721.3
: A
: 1007-1881(2011)07-0001-05
2011-01-14
劉永江(1985-), 男, 湖南湘潭人, 工學碩士, 研究方向為電力系統運行與控制。
