Application of Adaptive Backstepping Sliding Mode Control in Alternative Current Servo System of Rocket Launcher
2011-07-25 06:22:46GUOYajun郭亞軍MADawei馬大為WANGXiaofeng王曉峰LEGuigao樂貴高
Defence Technology 2011年3期
GUO Ya-jun(郭亞軍),MA Da-wei(馬大為),WANG Xiao-feng(王曉峰),LE Gui-gao(樂貴高)
(School of Mechanical Engineering,Nanjing University of Science and Technology,Nanjing 210094,Jiangsu,China)
Introduction
The wide variation in moment of inertia and unbalanced torque for the different quantity of rockets and the changes of resistance torque and load for the different kind of rockets may make a serious nonlinear exist in the servo system.Linear PID or PI controller[1]is usually adopted in the traditional control strategy,which cannot guarantee the dynamic performance or adapt to a variational situation,e.g.change of load torque,change of moment of inertia and external disturbance.The sliding mode control has a strong robustness for the uncertainty of model parameters,however,a‘chattering’problem exists in its control input[2-4].The backstepping control is a control method for the change in control object and the environmental disturbance[5].It can select an appropriate state space function as control input,and finish a controller design by iteration,backstepping and Lyapunov function optimization.Zhou[6],HU Jian-hui[7]and WANG Jia-jun[8]designed an adaptive backstepping speed controller,and simulated and analyzed the velocity loop of servo system simulated,but did not researched on the position control.
To have a better control performance of system,an adaptive backstepping sliding mode control method is presented by LIU Zheng-hua[9],which has a good robustness for system applied to virtual simulator with three axis.And this method is applied to underwater vehicle by GAO Jian[10].
The position control of pitch movement of rocket launcher is studied based on an adaptive backstepping sliding mode control method in the paper.The results show that the method can be used to achieve the good global stability and tracking performance,and reduce its sensitivity to external disturbance.
1 Problem Description
The actuating element of position servo system in the rocket launcher is a permanent magnet synchronous motor(PMSM).Digital control is used for the velocity loop and position loop,and the block diagram of system is shown in Fig.1.The control station can obtain the current reference angle of the rocket launcher and calculate the error.And the error can be used as an input of the adaptive backstepping sliding mode control algorithm.The control commands are converted into the voltage signals by DAC.The voltage signals are amplified to drive the AC servo motor.Thus the pitch and azimuth rocket launcher are changed by the decelerator and the slewing mechanism.
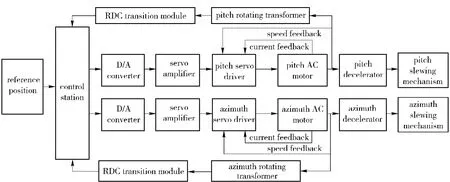
Fig.1 Sketch of position servo system structure of rocket launcher
2 Model of PMSM Based on Current Decoupling Control
Assuming that:
1)Ignore the saturation effect;
2)The motor air-gap field is uniformly distributed,and the induced counter electromotive force is sinusoidal waveform;
3)No magnetic hysteresis and eddy current loss;
4)The excitation current has no dynamic response;
5)The rotor has no excitation winding on it;
6)Under the vector control of orientation for the rotor magnetic pole position,the current excitation component of statorId=0.
According to the above assumptions,the mathematical model of PMSM under the rotating coordinated-qcan be written as

whereudanduqare the components of armature voltage on thed-qcoordinate,respectively;iqandidare the components of armature current on the coordinated-q,respectively;Lisequivalentarmature inductance(L=Ld=Lq);Randωrare the armature winding resistance and electric angular velocity,respectively;Ψfandpnare the rotor linkage of permanent magnet and the number of pole pairs,respectively;Bis velocity damp;Tlis the moment of the external disturbance force;Jis moment of inertia;Ktis electromagnetic moment coefficient;Temis the output moment of the motor.
In the three-closed loop of PMSM system,both PMSM and inverter are treated as“controlled object”because the hysteresis loop control is used in the current loop.Since the electromagnet time constant is far less than the mechanical time constant and the inverter is included in the current loop,the velocity loop can be simplified to a proportional link as analytic system,which proportional coefficient is 1.The adaptive backstepping sliding mode controller consists of the position controller and the velocity controller.Considering the decelerator and the slewing mechanism are high precision devices and the impact of gap on the system is ignored,a semi-closed loop control scheme can be used for the pitch system discussed above.
Letx1=θr,x2=ωr=,the state space equation of position servo system of rocket launcher can be established as

Eq.(5)can be expressed as

where,Am= -B/J,Bm=p2nψf/J,F(xiàn)(t)=(-pn/J)T1.
3 Principle of Adaptive Backstepping Sliding Mode Controller
3.1 Design of Backstepping Sliding Mode Controller
Step 1.The define position errore1and position referenceθrefare defined as,

and the virtual control function is set toα1=c1e1,wherec1is a positive constant.The Lyapunov function is defined as:

define

The derivative ofV1is obtained by Eq.(9)and(10):

Step 2.The derivative ofV2is

The Lyapunov function is defined as:

And the switching function is defined as

wherek1is a positive constant.
Eq.(13)is derived,we have
3.2 Determining the Upper Bound of Uncertainty
It is hard to predict the upper bound of uncertainties of controlled object.To avoid this problem,an adaptive algorithm is used to estimateFvalue.
Lyapunov functionis defined as

whereis the estimated value ofF(t),the estimated error is=F*-,andγis a positive constant.
So the adaptive backstepping sliding mode controller expressed as

wherehandβare the positive constant.
The adaptive rate is

3.3 Stability Analysis
The conditions of system stability obtained by Lyapunov function is analyzed.Substituting Eq.(18)and(19)into Eq.(17),we have
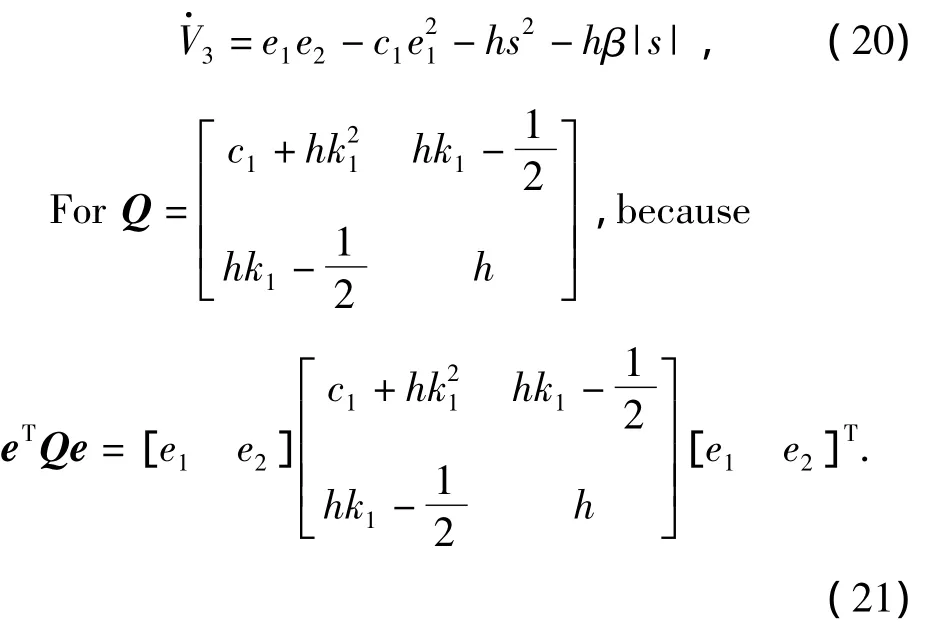
Eq.(20)can be rewritten in the following form:

As a result,from Lyapunov function stability we have

Qis ensured to be a positive definite matrix by takingh,c1andk1,that is≤0.
4 Simulation
The PID controller and adaptive backstepping sliding mode controller are designed based on the above model.The simulation system is shown in Fig.2.The important parameters of the system are as follows:loading and motor inertiaJ=8.627 ×10-3kg·m2;unbalanced moment and friction moment is 4.86 N·m;impact disturbing moment of external combustion-gas stream is 10 N·m;torque sensitivityKt=1.11 N·m/A;damping coefficientB=1.43 ×10-4N·m·s;stator resistanceRais 2.6Ω;winding inductanceLd=Lq=50 ×10-3H;rated currentIe=6.4 A and max currentImax=12.8 A;number of polesPn=4.The parameters of the backstepping sliding mode controller are given as follows:c1=150,k1=150,h=500,β=20,γ=18.The parameters of the PID controller are chosen as:kp1=10,kI1=0.01,kD1=0.3,and parameters in speed loop are chosen askp2=8,kI2=22.5,kD2=0.8.
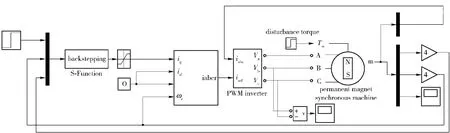
Fig.2 Simulation block diagram of AC position servo system
Matlab software is used in the simulation.The results are shown in Fig.3 -6.Fig.3 shows the load disturbance torque of 10 N·m applied at 0.5 s,and Fig.4 illustrates the simulation result of which moment of inertia changes 2 times.Fig.5 shows the tracking error curves of the adaptive backstepping sliding mode controller under idle load.The tracking error curves of PID are shown in Fig.6 under idle load.Sinusoidal pitch tracking inputsignalis given asθref=5sin(0.713 6t).
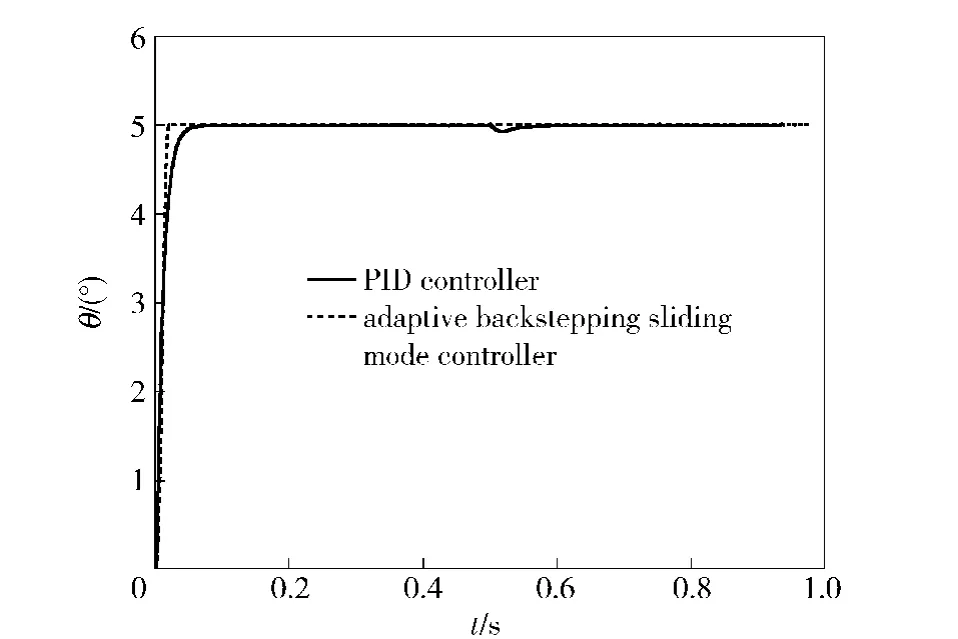
Fig.3 Step response subjected to load disturbance

Fig.4 Step response of doubly changed moment of inertia
It can be seen from Fig.3,4 and 6 that the classical control is more sensitive to loading disturbance and change in moment of inertia.There are smaller overshoot and static error when the external loading is added,and the adjusting time of system extends as the moment of inertia increases.The sine tracking error of position is larger when the rocket launcher is idle.
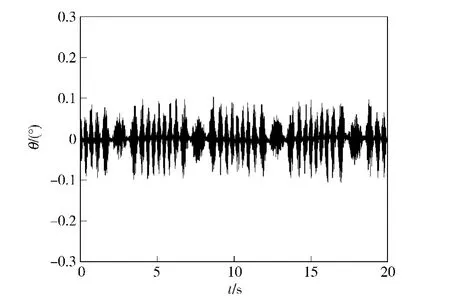
Fig.5 Error of adaptive backstepping sliding mode control
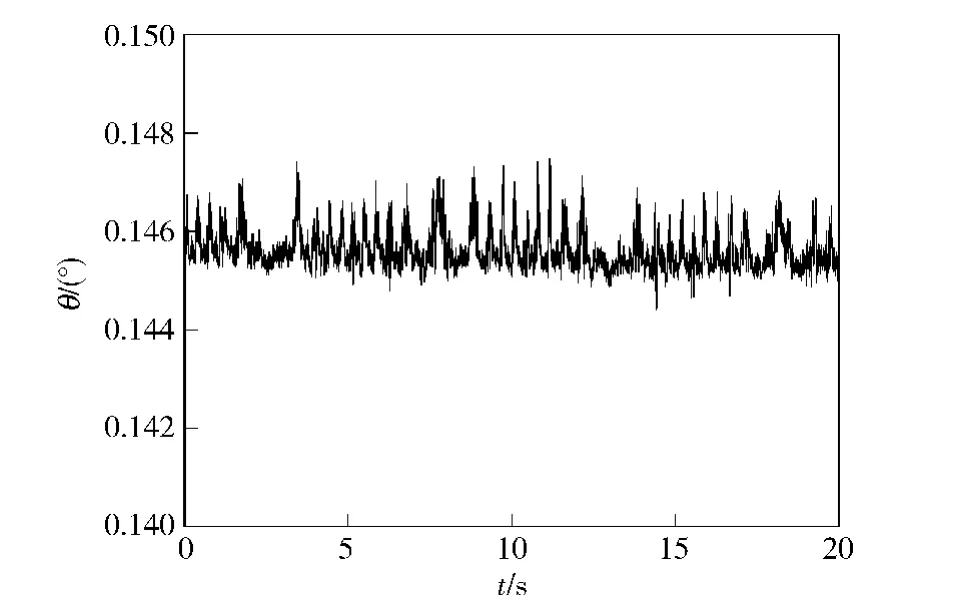
Fig.6 Error of PID control
It can be seen from Fig.3 - 5 that the adaptive backstepping sliding mode controller is less sensitive to the change in loading and has a stronger robustness.As the parameters change,the position curves have no overshoot and vibration.The tracking error produced by the adaptive backstepping sliding mode control is less than that produced by the classical control using the PID algorithm,so the method has an obvious advantage.
5 Conclusions
An adaptive backstepping sliding mode scheme is proposed to control the pitch position servo system of rocket launcher,and the mathematical model is established based on MATLAB/Simulink.The simulation results show that the proposed control algorithm eliminates effectively the static error of system and has a strong robustness to the perturbation of system parameters and load disturbance,and get a better tracking performance.The effectiveness of the controller is demonstrated by the theoretical analysis for stability and simulation studies.
[1]ZHU Yu-chuan,MA Da-wei,LI Zhi-gang,et al.Optimal sliding mode servo control with integral term for rocket launcher[J].Acta Armamentarii,2007,28(10):1272-1275.(in Chinese)
[2]CHAI Hua-wei,MA Da-wei,LI Zhi-gang,et al.Design and application of optimal MC-SMC in AC servo systems[J].Journal of Nanjing University of Aeronautics& Astronautics,2007,39(4):510-513.(in Chinese)
[3]YAN Mao-de,ZHANG Chang-qing,HE Yu-yao.State reference adaptive sliding mode control for a class of nonlinear systems with uncertainties[J].Journal of Northwestern Polytechnical University,2004,22(4):448 -451.(in Chinese)
[4]ZHANG Chun-xi,SUN Li-jun,ZHU Jian-liang,et al.Control technology of permanent magnet motor[J].Electric Machines and Control,2005,9(1):15 - 19.(in Chinese)
[5]ZHANG Peng,LI Ying-hui,XIAO Lei.Adaptive-backstepping control for servo system based on recurrent-neural network[J].Journal of System Simulation,2008,20(6):1475-1478.(in Chinese)
[6]Zhou J,Wang Y.Adaptive backstepping speed controller design for a permanent magnet synchronous motor[J].IEE Proc-Electric Power Application,2002,149(2):165-172.
[7]HU Jian-hui,ZOU Ji-bin.Modeling and simulation for adaptive backstepping control of PMSM[J].Journal of System Simulation,2007,19(2):247-303.(in Chinese)
[8]WANG Jia-jun, ZHAO Guang-zhou, QIDong-lian.Speed tracking control of permanent magnet synchronous motor with backstepping[J].Proceedings of the CSEE,2004,24(8):95-98.(in Chinese)
[9]LIU Zheng-hua,WU Yun-jie,ER Lian-jie,et al.Design of robust controller based on adaptive backstepping and slide mode for flight motion simulator[J].Journal of System Simulation,2006,18(2):894 -896.(in Chinese)
[10]GAO Jian,XV De-min,LI Jun,et al.Adaptive backstepping sliding mode control for surge motion of an autonomous underwater vehicle[J].Journal of Northwestern Polytechnical University,2007,25(4):552-554.(in Chinese)

- Defence Technology的其它文章
- Optimization Design of Double-parameter Shift Schedule of Tracked Vehicle with Hydrodynamic-mechanical Transmission
- A New Single DIFAR Sonobuoy Target Location Algorithm
- Waveguide Invariant and Passive Ranging Using Double Element
- Reliability Sensitivity Analysis for Location Scale Family
- Research on Estimation of Time Delay Difference in Passive Locating for Impulse Signal
- New Wideband Beam-forming Method Used in Underwater Communication System